БПЛА
1,117,875
4,231
Сообщение не найдено!
Сообщение #5257933 не найдено в ветке "БПЛА"!
Карма: -5.25
Регистрация: 24.04.2019
Сообщений: 21
Читатели: 0
Аккаунт заблокирован
Регистрация: 24.04.2019
Сообщений: 21
Читатели: 0
Аккаунт заблокирован
Цитата: Esploristo от 25.04.2019 14:25:32Мы говорим о визуальной одометрии или о полете по заранее снятой карте? Я говорю, что после облака построенная карта и трек - разваливаться начнут.
Я тоже вклинюсь в дискуссию.
Визуальная одометрия включает в себя в том числе и полет по разведанной карте. Пока вы летите, вы сохраняете все точки привязки. Если у вас есть уже снятая база данных, то нет проблем ее использовать.
Потеря трека не критична, так как происходит не часто, и при наличии разведанной карты, текущие координаты легко восстанавливаются.
Облако само по себе тоже не проблема. Автопилот ведет себя так-же как и человек. Если потеря была кратковременной, от позиция восстанавливается по последним известным точкам привязки. Если вы летели в облаке долго, то восстановление идет по карте, с учетом скорости, направления и т.д. Скорость и компас никто не отменял.
PS. И модератору спасибо что сюда перенес дискуссию.
Отредактировано: Dmitry1945 - 25 апр 2019 14:38:49


Москва
Карма: +354.74
Регистрация: 21.03.2013
Сообщений: 27,075
Читатели: 6
Регистрация: 21.03.2013
Сообщений: 27,075
Читатели: 6
Цитата: Esploristo от 25.04.2019 14:25:32Мы говорим о визуальной одометрии или о полете по заранее снятой карте? Я говорю, что после облака построенная карта и трек - разваливаться начнут.
Видимо, мы говорим о разных вещах. Я про то, что перспективной вижу систему, которая берёт изображение местности со смотрящей вниз камеры, и при помощи нейросети находит свои координаты по совмещению видимого изображения и спутниковых фото данной местности.
Империя - это мир, и этой идеологии достаточно. Мы живём в самой лучшей стране в мире и все нам завидуют.
Одушевлённое Одевают, Неодушевлённое Надевают.
Одушевлённое Одевают, Неодушевлённое Надевают.
Карма: -5.25
Регистрация: 24.04.2019
Сообщений: 21
Читатели: 0
Аккаунт заблокирован
Регистрация: 24.04.2019
Сообщений: 21
Читатели: 0
Аккаунт заблокирован
Цитата: slavae от 25.04.2019 14:38:39Видимо, мы говорим о разных вещах. Я про то, что перспективной вижу систему, которая берёт изображение местности со смотрящей вниз камеры, и при помощи нейросети находит свои координаты по совмещению видимого изображения и спутниковых фото данной местности.
Да, Эсплористо говорит о методе определения местоположения на основе анализа видеопотока и методов на основе эпиполярной геометрии.
Имея последовательность кадров даже с одной камеры, и зная некоторые линейные размеры, мы можем восстановить как 3D сцену (т.е. координаты всех точек в 3D), так и свое местоположение. Для этого нам нужно иметь изображение с камеры и значение высоты, или иметь стереоизображение, хотя бы на начальном этапе. Там математика не сложная, но i7 процессор тянет с трудом. )))
То о чем говорите Вы, это уже следующий этап, когда карта и точки привязки составляются на основе заранее подготовленных снимков. Это немного другое.
Карма: -39.87
Регистрация: 22.05.2018
Сообщений: 247
Читатели: 0
Аккаунт заблокирован
Регистрация: 22.05.2018
Сообщений: 247
Читатели: 0
Аккаунт заблокирован
Цитата: Dmitry1945 от 25.04.2019 15:02:29Имея последовательность кадров даже с одной камеры, и зная некоторые линейные размеры, мы можем восстановить как 3D сцену (т.е. координаты всех точек в 3D), так и свое местоположение. Для этого нам нужно иметь изображение с камеры и значение высоты, или иметь стереоизображение, хотя бы на начальном этапе. Там математика не сложная, но i7 процессор тянет с трудом. )))
О, мы читаем одни и те же источники!

Отредактировано: Esploristo - 25 апр 2019 15:29:53
Москва
Карма: +354.74
Регистрация: 21.03.2013
Сообщений: 27,075
Читатели: 6
Регистрация: 21.03.2013
Сообщений: 27,075
Читатели: 6
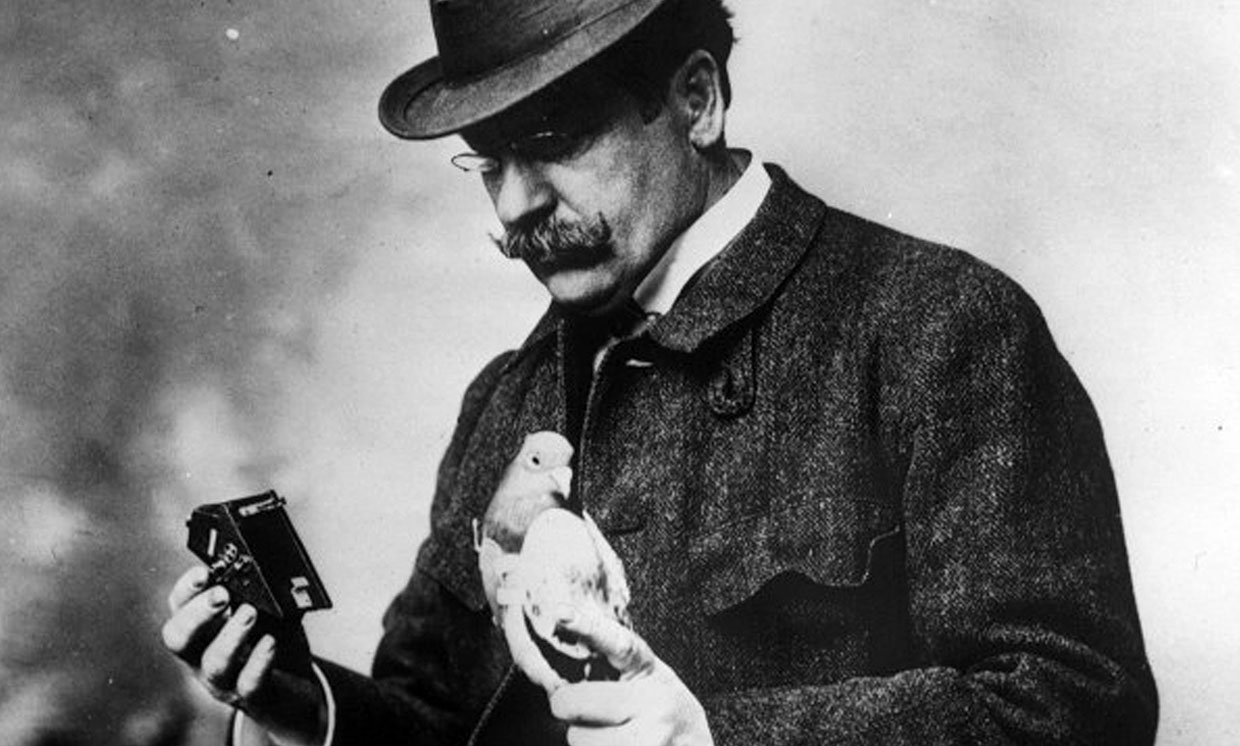
Обратите внимание на почтовых голубей: возможности этой технологии удивительны
Об авторе: Аллисон Марш – адъюнкт-профессор истории в Университете Южной Каролины, один из директоров Института наук, технологии и общества имени Энн Джонсон.
В вопросе установления связи между двумя точками ничто не может победить голубя. Кроме, разве что, редкого ястреба.

Птичий шпионаж: в 1970-х ЦРУ разработала крохотную камеру, превращавшую почтовых голубей в шпионов
Тысячи лет почтовые голуби переносили сообщения. И особенно полезными они оказывались в военное время. Юлий Цезарь, Чингисхан, Артур Уэлсли Веллингтон (во время битвы при Ватерлоо) — все они полагались на коммуникации посредством птиц. Во время Первой мировой войны войска связи США и военно-морской флот держали свои голубятни. Французское правительство наградило американскую птицу по кличке Шер Ами Военным крестом за доблестную службу во время битвы при Вердене. Во время Второй мировой британцы держали у себя более 250 000 почтовых голубей, 32 из которых получили медаль Марии Дикин, специальную награду для животных за военную службу [с 1943 по 1949 годы медаль была вручена 54 раза — тридцати двум голубям, восемнадцати собакам, трём лошадям и корабельному коту Саймону / прим. перев.].
И уж конечно Центральное разведывательное управление США не могло не превратить голубей в шпионов. В 1970-е департамент исследований и развития ЦРУ создал маленькую и лёгкую камеру, которую можно пристегнуть к груди голубя. После выпуска голубь по пути домой пролетал над целью шпионажа. Мотор внутри камеры, работающий от батарейки, прокручивал плёнку и открывал затвор. Поскольку голуби летают всего в нескольких сотнях метров над землёй, они могли получать куда как более детальные фотографии по сравнению с самолётами или спутниками. Были ли испытания голубиной фотосъёмки успешными? Мы не знаем. Эти данные по сей день остаются засекреченными.
Об авторе: Аллисон Марш – адъюнкт-профессор истории в Университете Южной Каролины, один из директоров Института наук, технологии и общества имени Энн Джонсон.
В вопросе установления связи между двумя точками ничто не может победить голубя. Кроме, разве что, редкого ястреба.
Птичий шпионаж: в 1970-х ЦРУ разработала крохотную камеру, превращавшую почтовых голубей в шпионов
Тысячи лет почтовые голуби переносили сообщения. И особенно полезными они оказывались в военное время. Юлий Цезарь, Чингисхан, Артур Уэлсли Веллингтон (во время битвы при Ватерлоо) — все они полагались на коммуникации посредством птиц. Во время Первой мировой войны войска связи США и военно-морской флот держали свои голубятни. Французское правительство наградило американскую птицу по кличке Шер Ами Военным крестом за доблестную службу во время битвы при Вердене. Во время Второй мировой британцы держали у себя более 250 000 почтовых голубей, 32 из которых получили медаль Марии Дикин, специальную награду для животных за военную службу [с 1943 по 1949 годы медаль была вручена 54 раза — тридцати двум голубям, восемнадцати собакам, трём лошадям и корабельному коту Саймону / прим. перев.].
И уж конечно Центральное разведывательное управление США не могло не превратить голубей в шпионов. В 1970-е департамент исследований и развития ЦРУ создал маленькую и лёгкую камеру, которую можно пристегнуть к груди голубя. После выпуска голубь по пути домой пролетал над целью шпионажа. Мотор внутри камеры, работающий от батарейки, прокручивал плёнку и открывал затвор. Поскольку голуби летают всего в нескольких сотнях метров над землёй, они могли получать куда как более детальные фотографии по сравнению с самолётами или спутниками. Были ли испытания голубиной фотосъёмки успешными? Мы не знаем. Эти данные по сей день остаются засекреченными.
Скрытый текст


Империя - это мир, и этой идеологии достаточно. Мы живём в самой лучшей стране в мире и все нам завидуют.
Одушевлённое Одевают, Неодушевлённое Надевают.
Одушевлённое Одевают, Неодушевлённое Надевают.
Карма: -21.22
Регистрация: 15.04.2018
Сообщений: 212
Читатели: 0
Аккаунт заблокирован
Регистрация: 15.04.2018
Сообщений: 212
Читатели: 0
Аккаунт заблокирован
Цитата: Тимон от 30.04.2019 15:31:45Понятней стало ) Человек использует питон и ноут на i7. Но я бы не сказал что у него i7 как то особенно напрягается, так как 6мс это 166 стереопар в секунду он обрабатывает, ...
О каких стереопарах вы говорите, если вся изюминка проекта в одной камере и матобработке изменения положения выбранных точек на изображении со временем? По изменению монокартинки строится 3d модель окружающего пространства.
Отредактировано: СОВ - 30 апр 2019 15:49:04
Карма: -5.25
Регистрация: 24.04.2019
Сообщений: 21
Читатели: 0
Аккаунт заблокирован
Регистрация: 24.04.2019
Сообщений: 21
Читатели: 0
Аккаунт заблокирован
Цитата: Тимон от 01.05.2019 21:21:37...
Тимон, если пару дней назад Вам дали на ютюбе ролик и Вы его посмотрели и думаете что поняли, то это не значит что Вы разбираетесь в предмете.
Обсуждать с Вами что-то смысла нет,
Карма: -39.87
Регистрация: 22.05.2018
Сообщений: 247
Читатели: 0
Аккаунт заблокирован
Регистрация: 22.05.2018
Сообщений: 247
Читатели: 0
Аккаунт заблокирован
Интересное видео...
По крайней мере половина - не компьютерная графика
https://www.youtube.com/watch?time_continue=1&v=c4VfNuoTrE4&fbclid=IwAR19E7RbGBLYEA09JCso6UKFL16EWawtlcQiamzvBOPBq6SmS2jtW6u4VtM
По крайней мере половина - не компьютерная графика
https://www.youtube.com/watch?time_continue=1&v=c4VfNuoTrE4&fbclid=IwAR19E7RbGBLYEA09JCso6UKFL16EWawtlcQiamzvBOPBq6SmS2jtW6u4VtM
Москва
Карма: +465.98
Регистрация: 19.05.2013
Сообщений: 17,855
Читатели: 6
Регистрация: 19.05.2013
Сообщений: 17,855
Читатели: 6
"все 60 спутников, успешно выведенных ракетой-носителей Falcon 9 на орбиту, подключились к интернету."
«Профессор в области компьютерных наук (Марк Хэндли), который специализируется на работе сетевых систем, провел симуляцию Starlink на основе имеющейся информации. Сеть будет иметь очень хорошую связь на больших расстояниях с малыми задержками, как, например, при отправке сообщений. Это очень важно для банков и подобных компаний, которые всегда хотят очень быстро получать информацию. Они платят большие деньги за создание сетей, зачастую, частным, а не обычным коммерческим провайдерам. Даже с первой фазой в 1600 спутников у SpaceX будут большие доходы».
___________________________
И так, вангую боевое применение данной системы - больше не нужны мобильные посты контроля над БПЛА, дрон запускается и всю инфу он берет по сети в реальном времени - данные о цели, зоны ПВО.... Управлять дроном, запущенным террористами в Сирии, будут прямо из кабинета в Пентагоне.
«Профессор в области компьютерных наук (Марк Хэндли), который специализируется на работе сетевых систем, провел симуляцию Starlink на основе имеющейся информации. Сеть будет иметь очень хорошую связь на больших расстояниях с малыми задержками, как, например, при отправке сообщений. Это очень важно для банков и подобных компаний, которые всегда хотят очень быстро получать информацию. Они платят большие деньги за создание сетей, зачастую, частным, а не обычным коммерческим провайдерам. Даже с первой фазой в 1600 спутников у SpaceX будут большие доходы».
___________________________
И так, вангую боевое применение данной системы - больше не нужны мобильные посты контроля над БПЛА, дрон запускается и всю инфу он берет по сети в реальном времени - данные о цели, зоны ПВО.... Управлять дроном, запущенным террористами в Сирии, будут прямо из кабинета в Пентагоне.
Отредактировано: Барристер - 24 май 2019 09:33:19
Карма: +1,423.21
Регистрация: 19.05.2009
Сообщений: 933
Читатели: 72
Регистрация: 19.05.2009
Сообщений: 933
Читатели: 72
Цитата: Барристер от 24.05.2019 09:32:32"все 60 спутников, успешно выведенных ракетой-носителей Falcon 9 на орбиту, подключились к интернету."
«Профессор в области компьютерных наук (Марк Хэндли), который специализируется на работе сетевых систем, провел симуляцию Starlink на основе имеющейся информации. Сеть будет иметь очень хорошую связь на больших расстояниях с малыми задержками, как, например, при отправке сообщений. Это очень важно для банков и подобных компаний, которые всегда хотят очень быстро получать информацию. Они платят большие деньги за создание сетей, зачастую, частным, а не обычным коммерческим провайдерам. Даже с первой фазой в 1600 спутников у SpaceX будут большие доходы».
___________________________
И так, вангую боевое применение данной системы - больше не нужны мобильные посты контроля над БПЛА, дрон запускается и всю инфу он берет по сети в реальном времени - данные о цели, зоны ПВО.... Управлять дроном, запущенным террористами в Сирии, будут прямо из кабинета в Пентагоне.
Это,просто, праздник какой-то !!! (с)

Гражданские сети общего доступа абсолютно беззащитны перед преднамеренными деструктивными действиями
Любую гражданскую сеть можно наглухо положить, подавив лишь около 0,01% их логических каналов управления.
Такая уязвимость - оборотная сторона простоты оконечных устройств, удобства использования и настройки сети.
Например, чтобы убить все сети 3G в радиусе около 15 км вокруг себя - достаточно устройства весом около 800 г и потреблением 30 Вт
Для управления военными БпЛА нужно будет создать отдельную сеть, построенную по, абсолютно, другим принципам.
Стоимость ее будет больше, примерно, на порядок.
Отредактировано: Равиль - 24 май 2019 13:39:11
Карма: +1,042.97
Регистрация: 15.03.2012
Сообщений: 24,750
Читатели: 20
Регистрация: 15.03.2012
Сообщений: 24,750
Читатели: 20
Цитата: Равиль от 24.05.2019 13:38:27Это,просто, праздник какой-то !!! (с)
Для управления военными БпЛА нужно будет создать отдельную сеть, построенную по, абсолютно, другим принципам.
Стоимость ее будет больше, примерно, на порядок.
Как Вы полагаете, уважаемый Равиль, смогут-ли даже такие затраты обеспечить необходимый уровень защищенности сети?
Отредактировано: Алёша Попович - 24 май 2019 14:10:48
Роса рассветная, светлее светлого,
А в ней живет поверье диких трав,
У века каждого на зверя страшного,
Найдется свой, однажды, Волкодав
А в ней живет поверье диких трав,
У века каждого на зверя страшного,
Найдется свой, однажды, Волкодав
Москва
61 год
Карма: +447.92
Регистрация: 15.07.2009
Сообщений: 29,907
Читатели: 8
Регистрация: 15.07.2009
Сообщений: 29,907
Читатели: 8
Цитата: Равиль от 24.05.2019 13:38:27Это,просто, праздник какой-то !!! (с)
Гражданские сети общего доступа абсолютно беззащитны перед преднамеренными деструктивными действиями
Любую гражданскую сеть можно наглухо положить, подавив лишь около 0,01% их логических каналов управления.
Такая уязвимость - оборотная сторона простоты оконечных устройств, удобства использования и настройки сети.
Например, чтобы убить все сети 3G в радиусе около 15 км вокруг себя - достаточно устройства весом около 800 г и потреблением 30 Вт
Для управления военными БпЛА нужно будет создать отдельную сеть, построенную по, абсолютно, другим принципам.
Стоимость ее будет больше, примерно, на порядок.
На порядок?!
Не, не выйдёт!
На два порядка — уже что-то просматривается... но затраты будут не по зубам даже крупнейшим военным бюджетам.
Многие пытаются смотреть, куда идёт дым.
А надо бы - откуда ветер дует.
А надо бы - откуда ветер дует.
Москва
Карма: +465.98
Регистрация: 19.05.2013
Сообщений: 17,855
Читатели: 6
Регистрация: 19.05.2013
Сообщений: 17,855
Читатели: 6
Цитата: Равиль от 24.05.2019 13:38:27Гражданские сети общего доступа абсолютно беззащитны перед преднамеренными деструктивными действиями
Любую гражданскую сеть можно наглухо положить, подавив лишь около 0,01% их логических каналов управления.
Такая уязвимость - оборотная сторона простоты оконечных устройств, удобства использования и настройки сети.
Например, чтобы убить все сети 3G в радиусе около 15 км вокруг себя - достаточно устройства весом около 800 г и потреблением 30 Вт
Для управления военными БпЛА нужно будет создать отдельную сеть, построенную по, абсолютно, другим принципам.
Стоимость ее будет больше, примерно, на порядок.
Кто сказал, что это только гражданские спутники..
А при чем тут 3G... речь о спутниковом вайфайном покрытии, 5 ГГц.... Количество спутников 12 000, передача информации от одного к другому.
И еще использование этой сети в качестве боевой сети управления и связи средствами поражения (авиационные, наземные, мобильные) - как будем глушить спутники на всем земном шаре? Запустился дрон с окияна,летит себе вдоль границы,так глушилок не напасешься.
Представляете, разведчику больше не нужна рация, телефон, достаточно файфай приемника в любой точке мира.
Как глушить эту направленную антенну?
| Усиление антенны (5 ГГц), dBi: | 24 |
| Коэффициент обратного излучения: | 40 dB |


Отредактировано: Барристер - 24 май 2019 20:24:19
Москва
61 год
Карма: +447.92
Регистрация: 15.07.2009
Сообщений: 29,907
Читатели: 8
Регистрация: 15.07.2009
Сообщений: 29,907
Читатели: 8
Цитата: Esploristo от 24.05.2019 20:13:20Управление БПЛА не будет отличаться от переписки в Телеграме..Фоточка, комментарий, фоточка, комментарий... Никто джойстиком в реальном времени давно не рулит. Космических аппаратов много - поток данных можно разделить. Повесить систему - ну можно попробовать повесить интернет. Пару маршрутизаторов, если хулиганить начнут, выкинет из сети.. Поток перемаршрутизируется дальше.

Вы это серьёзно пишете?!
Или просто издеваетесь над пожилым человеком?!
Многие пытаются смотреть, куда идёт дым.
А надо бы - откуда ветер дует.
А надо бы - откуда ветер дует.
Москва
61 год
Карма: +447.92
Регистрация: 15.07.2009
Сообщений: 29,907
Читатели: 8
Регистрация: 15.07.2009
Сообщений: 29,907
Читатели: 8
Цитата: Esploristo от 25.05.2019 10:02:55Абсолютно. Смотрите - новая система связи автоматически даёт и еще одну систему навигации, вдобавок к GPS. Причем гибкую и управляемую. Фиг подделаешь. Т.е. борт знает где он, результаты работ - скидывает...( какая разница, в общем, как это выглядит - фотка - вполне вариант, если канал позволяет). А задание - набор текстовых строчек ( маршрут - набор координат). Собственно говоря, чего еще то желать? Тотальное господство в информационном пространстве...
Прекратите издеваться...
Это уже не смешно, если шутку (да ещё неудачную) повторять несколько раз...

Многие пытаются смотреть, куда идёт дым.
А надо бы - откуда ветер дует.
А надо бы - откуда ветер дует.
Карма: +1,423.21
Регистрация: 19.05.2009
Сообщений: 933
Читатели: 72
Регистрация: 19.05.2009
Сообщений: 933
Читатели: 72
Цитата: Алёша Попович от 24.05.2019 14:10:19Как Вы полагаете, уважаемый Равиль, смогут-ли даже такие затраты обеспечить необходимый уровень защищенности сети?
Да.
Спутниковую сеть на низколетах или среднелетах, неубиваемую для РЭБ создать можно.
РЭБ сейчас проигрывает серьезной военной связи.
Но...
1. это будет ОЧЕНЬ дорого (соглашусь с камрадом dmitriк62 насчет двух порядков)
2.У этой сети будут свои, специфические не РЭБовские уязвимости.
Т.е. свалить эту сеть будет можно неРЭБовскими способами. Например, атакой наземных управляющих станций
3. Одному Аллаху известно, что станет с ионосферой после обмена МРЯУ
Отредактировано: Равиль - 27 май 2019 16:05:33

Москва
37 лет
Карма: +739.64
Регистрация: 18.02.2011
Сообщений: 13,021
Читатели: 6
Регистрация: 18.02.2011
Сообщений: 13,021
Читатели: 6
Цитата: Esploristo от 27.05.2019 20:54:02А кто смеется то? Это всё крайне серьёзно. Это глобальное стратегической преимущество... ДЛя них теперь понятие "туман войны" станет гораздо слабее. Им достаточно сбросить любым способом любое устройство сбора информации на поверхность Земли...А потом спокойненько собирать данные. Сигналы - не проблема...С Марсом и окраинами Солнечной системы идет радиообмен. Так что выцепить свой сигнал из шума и мусора с со 300-400 км на фоне неба или Земли под собой - уже не слишком сложно. Имея глобальное преимущество в производстве и разработке электроники.
Сейчас у них то 2019 год, а у нас - конец 80ых....
Что мешает сбивать такие спутники, если речь идет о противнике вроде нас? Орбиты предсказуемые, высота маленькая - можно даже не ракетой, а лазером. Оно стратегическое только для тех, кто не может достать, а это снова страны второго и третьего эшелона.
А может хватит повторять за западом слово санкции? Ведь реально это "санкции мирового сообщества к виновному" а разрыв части отношений с некоторыми странами!

Пермь
45 лет
Карма: +151.63
Регистрация: 25.09.2009
Сообщений: 1,432
Читатели: 0
Регистрация: 25.09.2009
Сообщений: 1,432
Читатели: 0
Цитата: Foxhound от 27.05.2019 23:00:55высота маленькая
600 км маленькая высота? Ну, в сравнении с геостационаром да, а так вполне прилично.
Deus est mechanicus
Москва
61 год
Карма: +447.92
Регистрация: 15.07.2009
Сообщений: 29,907
Читатели: 8
Регистрация: 15.07.2009
Сообщений: 29,907
Читатели: 8
Цитата: Esploristo от 27.05.2019 20:54:02А кто смеется то? Это всё крайне серьёзно. Это глобальное стратегической преимущество... ДЛя них теперь понятие "туман войны" станет гораздо слабее. Им достаточно сбросить любым способом любое устройство сбора информации на поверхность Земли...А потом спокойненько собирать данные. Сигналы - не проблема...С Марсом и окраинами Солнечной системы идет радиообмен. Так что выцепить свой сигнал из шума и мусора с со 300-400 км на фоне неба или Земли под собой - уже не слишком сложно. Имея глобальное преимущество в производстве и разработке электроники.
Сейчас у них то 2019 год, а у нас - конец 80ых....
Метамфетамины?..
Грибы?..
Завязывайте, это очень опасное увлечение!

Многие пытаются смотреть, куда идёт дым.
А надо бы - откуда ветер дует.
А надо бы - откуда ветер дует.
Москва
37 лет
Карма: +739.64
Регистрация: 18.02.2011
Сообщений: 13,021
Читатели: 6
Регистрация: 18.02.2011
Сообщений: 13,021
Читатели: 6
Цитата: Esploristo от 28.05.2019 09:45:16Ну если вы войну начнёте - ничего не мешает.
Вы писали не про войну? Если так то я вас не понял.
Цитата: Esploristo от 28.05.2019 09:45:16Лазером через всю атмосферу на дальность 600 км...Да и защита от лазера-листик золотой фольги на корпус, и полированая антенна наружу. Обсбивайся, аппарат из зоны поражения через минуту выйдет и остынет....
Американские менее мощные лазеры воздушного базирования стреляли по мишеням, имитирующим ракеты на 200-300 км в плотной атмосфере, ели я не ошибаюсь. Тут у нас микроспутник с гораздо более тонкими конструкциями и запасом прочности + слой атмосферы будет меньше. Поэтому фольга расплавится / испарится раньше, чем аппарат выйдет из зоны поражения. Что будет солнечными батареями, попавшими в пятно лазера, тоже в целом понятно.
Цитата: Esploristo от 28.05.2019 09:45:16Но и не забывайте главное - на стороне Маска будут играть, в том числе, и наши толковые инженеры и учёные за хорошую зарплату. А за нашу сторону - Рогозин и Чубайс, вместе со Сколково и Роснано.
Эти товарищи по гамбургскому счету эффективнее - ведь предыдущие варианты оружия будущего (лазеры как система ПВО и гиперзвук), которые обе страны делали одновременно, Россия уже развертывает, а США не осилили.
Отредактировано: Foxhound - 28 май 2019 22:44:46
А может хватит повторять за западом слово санкции? Ведь реально это "санкции мирового сообщества к виновному" а разрыв части отношений с некоторыми странами!
Сейчас на ветке:
2,
Модераторов: 0,
Пользователей: 0,
Гостей: 0,
Ботов: 2