А как же оно тикает?
11,382,850
15,192

|
Senya ( Слушатель ) |
| 25 сен 2017 21:03:01 |
Инвертор
новая дискуссия Дискуссия 304Цитата: Zkvxz от 25.09.2017 20:56:56Признаюсь честно, так глубоко не погружался в теорию электродвигателей, но изучал в институте теорию ДВС, которую почти забыл. Практика же мне подсказывает, что частотный привод "душит" асинхронник на неоптимальных оборотах. Буквально две недели назад делая ОКР мы "опрокинули" 95-киловаттник на 450 оборотах (оптимальные на шильдике - 1450), задали 1000 об/мин - он просел (по оборотам) но вытянул; задали 1100 - почти не просел.
Хм. Режим скалярный, векторный разомкнутый, векторный замкнутый? Что за привод (я мало знаю, но вдруг)?
Хотя гораздо лучше в А как же оно тикает?, я туда ответ продублирую.
ОТВЕТЫ (7)
|
|
Senya ( Слушатель ) |
| 26 сен 2017 06:34:44 |
Цитата: Zkvxz от 26.09.2017 05:30:29
Мне к сожалению не знаком, но попробую найти почитать, какие ещё режимы управления для этой модели доступны. В принципе скалярный режим нормально работает на частотах от половины до номинала, в крайнем случае от трети до номинала. 450 об/мин для четырёхполюсника и правда "на грани". Но можно покопать в двух направлениях - не выставлена ли случайно квадратичная характеристика (тут явно нужна линейная), и нельзя ли приподнять напряжение форсировки на низких частотах. То что при работе на малой частоте с полным моментом запросто потребуется дополнительное охлаждение - к гадалке можно не ходить.
UPD.
Вот тут http://www.bitek-e.r…ll_rus.pdf (http://www.bitek-e.r…-c2000.htm) приведено (стр. 171 из 488)
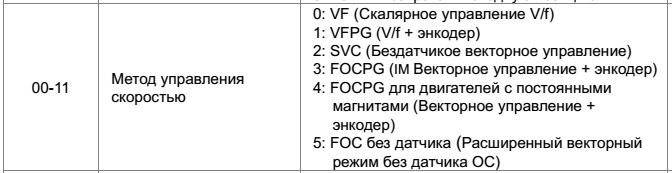
Как минимум можно использовать вместо нулевого режим 2.
|
|
stranger1234 ( Слушатель ) |
| 26 сен 2017 10:23:00 |
Цитата: Senya от 26.09.2017 06:34:44
У мну 4 полюсный электродвигатель стоит на мембранном насосе высокого давления с сильно меняющейся нагрузкой...В среднем выше 750 rpm редко когда вообще подимаецо, а то и 400-500. Режим - скалярного управления, U/f. Правда с принудительным охлаждением. Vacon -20 -031. Летом правда систему модернизировали - потавили вместо двух потребителей третьего - ну соотвественно средння загрузка вверх пошла, правда режим меняющейся нагрузки (0-100%) не поменялся, но интервал низкого расхода естественно сократился.
|
|
Senya ( Слушатель ) |
| 26 сен 2017 16:11:50 |
Не буду притворяться экстрасенсом, лечащим по фотографии
 - просто предположение. Характеристика нагрузки квадратичная, а у привода линейная. Там даже запасец небольшой может быть. Даже если обе квадратичные может нормально работать при правильном бустерном напряжении. А Zkvxz, насколько я понял, гонял двигатель на пониженных оборотах, но с номинальным моментом на валу.
- просто предположение. Характеристика нагрузки квадратичная, а у привода линейная. Там даже запасец небольшой может быть. Даже если обе квадратичные может нормально работать при правильном бустерном напряжении. А Zkvxz, насколько я понял, гонял двигатель на пониженных оборотах, но с номинальным моментом на валу.
|
|
stranger1234 ( Слушатель ) |
| 26 сен 2017 16:54:53 |
Цитата: Senya от 26.09.2017 16:11:50
Не нагрузка как раз в линейная про частоте ибо насос не центробежный, а мембранный - пять камер по очереди выдавливают фиксированный объем жидкости в линию, а давление в линии стабилизируется запасом жидкости в гидроаккумуляторе.... Но пуск тяжелый
Цитата
Там даже запасец небольшой может быть. Даже если обе квадратичные может нормально работать при правильном бустерном напряжении. А Zkvxz, насколько я понял, гонял двигатель на пониженных оборотах, но с номинальным моментом на валу.

|
Zkvxz ( Слушатель ) |
| 26 сен 2017 10:58:05 |
Цитата: Senya от 26.09.2017 06:34:44
Нам там копаться в оборудовании уже не дадут. Во вновь изготавливаемом можно будет попробовать.
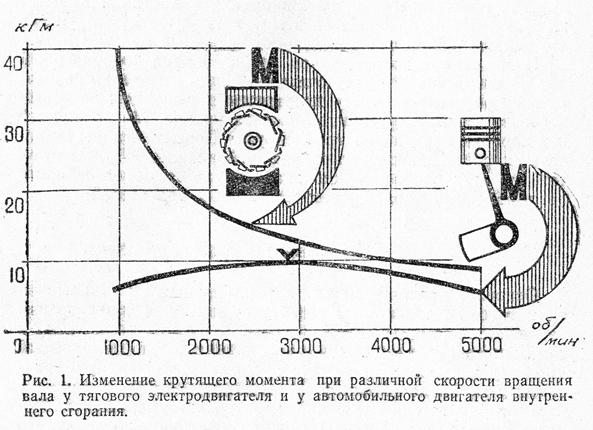
Возвращаясь к ДВС и ДПТ и их графикам:
|
|
Senya ( Слушатель ) |
| 26 сен 2017 16:07:20 |
Цитата: Zkvxz от 26.09.2017 10:58:05
Всё правильно, знакомые до слёз графики.
Только характеристика асинхронного двигателя при частотном регулировании скорости и характеристика при регулировании с помощью частотного привода это совсем разные вещи. За исключением примера при U=0.8 все графики даны для номинального напряжения, а в скалярном режиме привод с падением задания частоты напряжение обычно снижает, причём пропорционально уменьшению частоты. А как легко увидеть на графике, момент падает как квадрат падения напряжения. Ничего удивительного, что при 400 оборотах двигатель опрокинулся, а при 1000 просел (т.е. работал вблизи точки опрокидывания со скольжением в районе 20% вместо 4% номинальных).
Для частотного привода в векторном режиме график момента представляет прямую линию на всех скоростях, а точнее приведённый рисунок не имеет для него смысла. Потому что привод каждые несколько миллисекунд оценивает скорость вращения вала двигателя, и модифицирует скорость вращения поля и подаваемое напряжение так, чтобы вал крутился со строго заданной скоростью. Это может быть энкодер, датчик Холла в зазоре ротор/статор для измерения потокосцепления (хотя мне лично не встречались), или просто измерения токов и напряжений на выходе привода для определения текущего "косинуса фи", вычисления и поддержания активной компоненты тока (от которой собственно наш момент и зависит).