Робототехника
138,840
350

|
johnsib ( Слушатель ) |
| 28 июл 2023 16:36:49 |
Заметка про антрпоморфных (человекоподобных) роботов
новая дискуссия Дискуссия 93
Наткнулся на Дзен на видео испытания прямохождения человеко-подобного робота.
Вспомнил про разработки Бостон Динамикс, про китайцев и японцев:
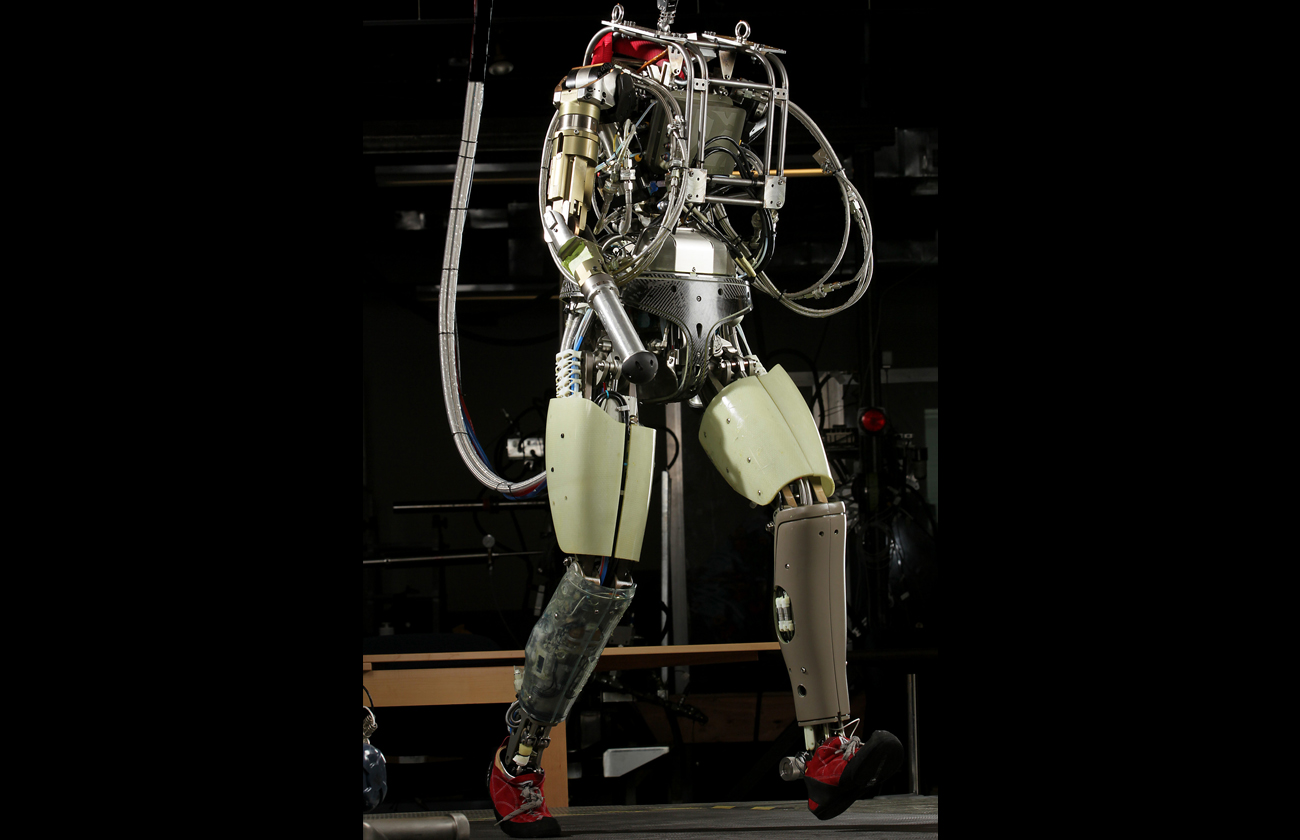

Все почему-то пытаются работать в направлении копирования человека в части прямохождения.
И подумал, что это, по сути, тупиковая ветвь развития - попытка создать антропоморфное тело с прямохождением.
Ведь если посмотреть в окно на быт человека, то можно заметить, что в развивающихся урбанистических городах только самые беззаботные ходят пешком, и то только для того, что бы ПО БЫСТРЕЕ дойти до магазина или аптеки. Дойти до остановки, что бы сесть в скоростной транспорт, быстро добраться из точки "А" в точку "Б". Прямохождение и его медлительность в процессе выполнения профессиональных функций - вообще акт не эффективный. Даже самый "ходячий" вид работы , не позволяет быть эффективным , не пересаживаясь на велосипед или самокат. Пример - курьеры)

То есть даже самая примитивная функция доставки человеком к двери, нам не интересна , если будет осуществляться пешком, на двоих. Медленно, мы за это не хотим платить, а платим за скорость доставки.
Что говорить про тотальную мобильность автомобилистов, которые используют ноги только для того что бы дойти от двери дома до лифта, а ниже - с парковки до авто, далее с авто до дверей офиса, кафе, ресторана..

То есть, в урбанизированном мире профессиональных функций, человек избегает использовать прямохождение (за исключением некоторых видов спорта, что тоже профессиональная функция, но в разрезе исключительно развлечения - 40 тысяч сидящих людей смотрят на 44 ноги)))
РОБОТ как раз таки и призван выполнять исключительно специальные профессиональные функции. Так тогда зачемзайцу пятая нога их делать сразу в ущербной версии прямохождения?
Ведь если мы ценим в любой профессии СКОРОСТЬ перемещения в пространстве и затачиваем всю нашу инфраструктуру под то , что бы перемещаться быстрей, то не стоит ли тогда сразу проектировать роботов иначе? Роботы, которые будут делить с нами пространство (перемещаться по тротуарам, ездить в общественном транспорте с нами, находиться в спецтехнике), выполняя свои профессиональные функции, должны быть конечно антропоморфны - иметь габариты человека, стоя помещаться на той же площади что и человек.
Но покинув тесное пространство человека, робот должен делать свою работу быстро - доставлять что-то(робот-курьер), перемещаться к точке помощи(робот пожарный) итд, а значит решение по прямохождению необходимо адаптировать к скорости перемещения в пространстве. Решение простое. В природе есть существа двуногие, которые перемещаются быстрее человека:
Страус))

Его "конструкция" идеально подходит под функцию скорости))
И конечно, разработки таких моделей уже есть:


Просто хочу обратить внимание именно на то, что в сложившейся парадигме нашего урбанизированного пространства именно "страусиная" модель опорно-двигательного аппарата является перспективной!!
Необходимо это учитывать при создании антропоморфных роботов в России))
А не вот это вот всё:
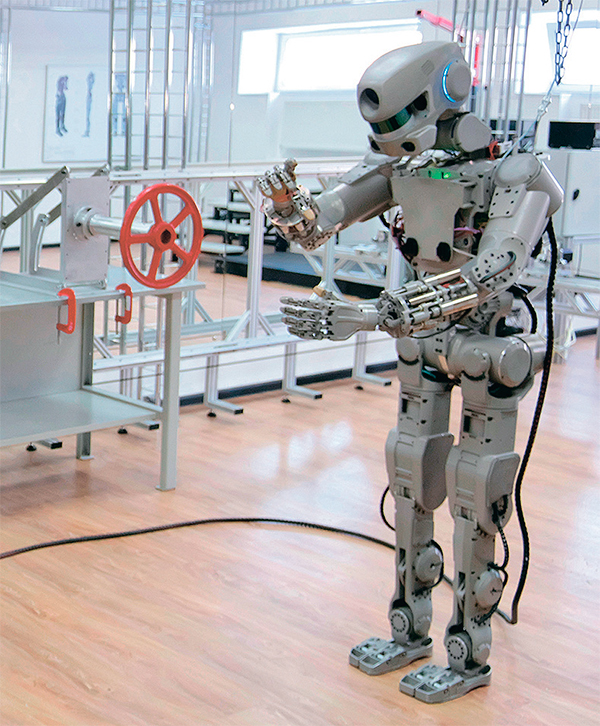
Понятно, что на "Фёдоре" отрабатывают программные алгоритмы, но ветвь человекоподобия - тупиковая и не стоит ее развивать в таком виде
Что ещё. К роботу-"страусу" необходимо приделать манипуляторы. И не два, а минимум 4 - два основных и два вспомогательных. Потому что, если мы захотим антропоморфных роботов интегрировать в сферу ручного труда (строители, например), то, поверьте, две руки вообще не решают полноценно профессиональных задач - это из опыта)))
Две руки-манипулятора держат то что необходимо крепить, и ещё две руки-манипулятора держат, то чем это крепить - это просто факт!!))
Самая частая фраза на стройке после "Бля!!": "Ну-ка, поддержи, Санёк!! рук не хватает.. Санёк!! чё стоишь лупишся!! Подай!!"))))

Вывод:
Антропоморфный робот, которого можно интегрировать в нашу инфраструктуру, кардинально не меняя её, должен иметь:
1. Аппарат хождения , позволяющий передвигаться быстро (по "рептилоидному", но без хвоста, как курица или страус);
2. Должен иметь минимум 4 руки-манипулятора симметрично расположенных.
А значит выглядеть он должен примерно вот так:
По части НОГ

И вот так по части РУК

В общем, как Генерал Гривус из звездных войн, только в руках перфоратор и шуруповерт!))))

На то она и "заметка", что бы натолкнуть к хорошей мысли через шутливое повевствование))

Вспомнил про разработки Бостон Динамикс, про китайцев и японцев:
Все почему-то пытаются работать в направлении копирования человека в части прямохождения.
И подумал, что это, по сути, тупиковая ветвь развития - попытка создать антропоморфное тело с прямохождением.
Ведь если посмотреть в окно на быт человека, то можно заметить, что в развивающихся урбанистических городах только самые беззаботные ходят пешком, и то только для того, что бы ПО БЫСТРЕЕ дойти до магазина или аптеки. Дойти до остановки, что бы сесть в скоростной транспорт, быстро добраться из точки "А" в точку "Б". Прямохождение и его медлительность в процессе выполнения профессиональных функций - вообще акт не эффективный. Даже самый "ходячий" вид работы , не позволяет быть эффективным , не пересаживаясь на велосипед или самокат. Пример - курьеры)
То есть даже самая примитивная функция доставки человеком к двери, нам не интересна , если будет осуществляться пешком, на двоих. Медленно, мы за это не хотим платить, а платим за скорость доставки.
Что говорить про тотальную мобильность автомобилистов, которые используют ноги только для того что бы дойти от двери дома до лифта, а ниже - с парковки до авто, далее с авто до дверей офиса, кафе, ресторана..
То есть, в урбанизированном мире профессиональных функций, человек избегает использовать прямохождение (за исключением некоторых видов спорта, что тоже профессиональная функция, но в разрезе исключительно развлечения - 40 тысяч сидящих людей смотрят на 44 ноги)))
РОБОТ как раз таки и призван выполнять исключительно специальные профессиональные функции. Так тогда зачем
Ведь если мы ценим в любой профессии СКОРОСТЬ перемещения в пространстве и затачиваем всю нашу инфраструктуру под то , что бы перемещаться быстрей, то не стоит ли тогда сразу проектировать роботов иначе? Роботы, которые будут делить с нами пространство (перемещаться по тротуарам, ездить в общественном транспорте с нами, находиться в спецтехнике), выполняя свои профессиональные функции, должны быть конечно антропоморфны - иметь габариты человека, стоя помещаться на той же площади что и человек.
Но покинув тесное пространство человека, робот должен делать свою работу быстро - доставлять что-то(робот-курьер), перемещаться к точке помощи(робот пожарный) итд, а значит решение по прямохождению необходимо адаптировать к скорости перемещения в пространстве. Решение простое. В природе есть существа двуногие, которые перемещаются быстрее человека:
Страус))
Его "конструкция" идеально подходит под функцию скорости))
И конечно, разработки таких моделей уже есть:
Просто хочу обратить внимание именно на то, что в сложившейся парадигме нашего урбанизированного пространства именно "страусиная" модель опорно-двигательного аппарата является перспективной!!
Необходимо это учитывать при создании антропоморфных роботов в России))
А не вот это вот всё:
Понятно, что на "Фёдоре" отрабатывают программные алгоритмы, но ветвь человекоподобия - тупиковая и не стоит ее развивать в таком виде
Что ещё. К роботу-"страусу" необходимо приделать манипуляторы. И не два, а минимум 4 - два основных и два вспомогательных. Потому что, если мы захотим антропоморфных роботов интегрировать в сферу ручного труда (строители, например), то, поверьте, две руки вообще не решают полноценно профессиональных задач - это из опыта)))
Две руки-манипулятора держат то что необходимо крепить, и ещё две руки-манипулятора держат, то чем это крепить - это просто факт!!))
Самая частая фраза на стройке после "Бля!!": "Ну-ка, поддержи, Санёк!! рук не хватает.. Санёк!! чё стоишь лупишся!! Подай!!"))))
Вывод:
Антропоморфный робот, которого можно интегрировать в нашу инфраструктуру, кардинально не меняя её, должен иметь:
1. Аппарат хождения , позволяющий передвигаться быстро (по "рептилоидному", но без хвоста, как курица или страус);
2. Должен иметь минимум 4 руки-манипулятора симметрично расположенных.
А значит выглядеть он должен примерно вот так:
По части НОГ
И вот так по части РУК
В общем, как Генерал Гривус из звездных войн, только в руках перфоратор и шуруповерт!))))
На то она и "заметка", что бы натолкнуть к хорошей мысли через шутливое повевствование))
Отредактировано: johnsib - 28 июл 2023 17:21:19
ОТВЕТЫ (1)
|
|
Николаич ( Слушатель ) |
| 01 дек 2023 13:06:16 |
Цитата: johnsib от 28.07.2023 16:36:49
1. Федор - не робот. Это антропоморфный манипулятор. Функции самостоятельного перемещения у него нет. На оператора надевается задающее устройство копирующего типа (костюм), а далее угловые перемещения суставов костюма копируются исполнительным устройством (Федором).
2. Идея Федора как раз в том, чтобы его использовать в среде, изначально предназначенной для человека (например, подъем по лестнице, открывание двери естественным хватом и т.д.)
Причем если с работой руками у него в принципе получилось (на видео видно - в задающем устройстве главный конструктор проекта Алексей Богданов, манипулятор копирует его действия), то с ходьбой - обратите внимание, он без поддержки тросами не передвигался.
Это и понятно - проект затевался ради манипуляторов-роборук, способных открыть дверь ключом, разъединить электроразъем, расстегнуть застежку и т.д.
3. Есть варианты типа "кентавр" - это когда антропоморфный торс с руками и головой размещается на гусеничном или колесном шасси.
и здесь да, возможно, что торс на четырехногом шагающем шасси из двух сочлененных страусов окажется наиболее интересным в плане проходимости вариантом.