Тред №315972
12 апр 2011 в 09:20
Yuri Rus
|
|---|
|
Я буду в основном говорить о волнах и волновом уравнении. Отмечу, что уравнения динамики жидкости и твердого тела в классической механике обычно выражаются в двух формах – лагранжевой и эйлеровой. Уравнения в форме Лагранжа описывают движения индивидуальной частицы жидкости или твердого тела (точнее, некоторого элемента объема, состоящего из многих частиц). Координаты (x, y, z) частицы считаются функциями времени и трех параметров (a, b, c), в качестве которых часто выбираются координаты частицы при t = 0. Уравнения в форме Эйлера описывают то, что происходит в некоторой точке пространства (x, y, z) (точнее, с неким бесконечно малым элементом длины, поверхности или объема) на протяжении некоторого промежутка времени. Рассматриваются силы, скорости, смещения и т.д. применительно именно к этому малому элементу, и для него выводятся дифференциальные уравнения. Для полного описания поведения системы, задаются еще начальные и граничные условия.
Я предлагаю третий подход. Вместо того, чтобы рассматривать силы, скорости и смещения некого элемента среды (или некой частицы), расположенного в произвольной точке пространства, мы будем начинать анализ распространения волн с их источника. Есть источник, он создает какую-то силу, действующую на окружающие его элементы среды (которые не расположены где-то далеко, а прямо и непосредственно контактируют с источником), эта сила вызывает смещение этих элементов, которые приобретают ускорение, скорость, далее они воздействуют на соседние с ними элементы среды, и т.д. Причем, что важно с физической точки зрения – источник создает не единичную волну, которая затем распространяется по покоящейся среде, а множество волн, непрерывно генерирует их. Кроме того, если мы хотим обсудить теорию относительности, мы должны рассмотреть движение источника относительно среды. Однако, прежде чем приступить к этой задаче, нам необходимо рассмотреть само понятие функции, ее производной и дифференциала. Как ни дико это звучит, физика оперирует неверными определениями полного дифференциала, дивергенции, ротора и т.п. Неудивительно, что такие ошибки делают почти все уравнения физики полностью неверными. Я покажу это на нескольких простых примерах. Очевидно, что вместо частных примеров, это все легко написать в общей форме, но мне кажется, что на конкретных примерах эти принципы будет легче понять. Позже это будет переписано в более строгой, более формальной форме, сейчас же я просто хочу донести свои мысли до первой аудитории. Нас будут интересовать только гладкие функции. Что такое функция от одного аргумента? Скажем, функция y = 3x₃? Она представляет собой кривую линию, проходящую через ноль. Ее производная dy/dx = 9х₂. Каждому значению x соответствует определенное значение y. Но: не каждой точке с координатами (х, у) соответствует какое-то значение кривой y = 3x₃. Большинство точек на плоскости (х, у) – «пустые». А сейчас рассмотрим другую кривую: y = 3(x – 2)₃. Она выглядит точно так же, как y = 3x₃, но сдвинута относительно нее вправо на две единицы. Аналогично ведут себя функции y = 3(x – 3.3)₃ y = 3(x – 5.4)₃ y = 3(x – 83.23)₃ Они сдвинуты относительно функции y = 3x₃ вправо на 3.3, 5.4 и 83.23, соответственно. Очевидно, что все эти кривые образуют семейство функций, которые описываются формулой y = 3(x – u)₃, где u – это другая непрерывная переменная. Варьируя u, мы получаем, что теперь через каждую точку на плоскости (х, у) проходит какая-то кривая из семейства y = 3(x – u)₃. Заметим, что на плоскости (x, y) – это разные кривые, разные функции. Однако, если мы сообразим, что y = 3(x – u)₃ – это функция от двух аргументов x и u, а не от одного только x, то мы можем изобразить зависимость y(x, u) уже не на плоскости (x, y), а в трехмерном пространстве (x, u, y), причем теперь это не семейство функций, а одна функция. Назовем такую функцию y(x, u) в трехмерном пространстве полной функцией (full, or total function), а индивидуальные функции y(x, u) в двухмерном пространстве – единичными функциями (singular functions). (((Вопрос к аудитории: какой термин лучше – единичная функция или индивидуальная функция?))) Для каждой единичной функции, u – это константа. Обозначим ее как uc, чтобы отличать единичные функции y(x, uc) с постоянным значением uc от полной функции y(x, u) с переменной u. Только в этом трехмерном пространстве будут иметь смысл полный дифференциал Dy и частные производные ∂y/∂x и ∂y/∂u: Dy = (∂y/∂x)dx + (∂y/∂u)du = 9(x – u)₂dx – 9(x – u)₂du = 9(x – u)₂(dx – du) Если же мы, по какой-то причине, не хотим считать u независимой переменной и полагаем, что y - это функция только от x, упорно изображая все семейство кривых y = 3(x – uc)₃ на плоскости (x, y), то, разумеется, ни о каком полном дифференциале Dy мы даже задумываться не будем. Есть только производная от y по x, и точка. При этом, хотя мы теперь можем найти производную dy(x)/dx для любой точки плоскости (x, y), то есть «пустых» точек на этой плоскости больше нет, эти производные на самом деле принадлежат разным единичным функциям y(x, uc), поскольку значения uc у них разные. Рассмотрим теперь функции вида y = 3(x – 2)₃ + 2 y = 3(x – 5.4)₃ + 7.83 y = 3(x – 83.23)₃ + 4.125 и т.д. Заметим, что это семейство функций мы тоже можем нарисовать на одной плоскости (x, y). Очевидно, они образуют другое семейство кривых вида y = 3(x – u)₃ + p, которые сдвинуты вверх на величину p по сравнению с y = 3(x – u)₃. Подчеркнем, что на одной плоскости это разные единичные функции. Только в четырехмерном пространстве (x, u, p, y) одна-единственная функция y(x, u, p) будет описывать все значения u и p. Поэтому она и является полной. В этом четырехмерном пространстве, полный дифференциал Dy(x, u, p) будет равен: Dy(x, u, p) = (∂y/∂x)dx + (∂y/∂u)du + (∂y/∂p)dp = 9(x – u)₂dx – 9(x – u)₂du + dp Заметим, что если мы изобразим функцию y = 3(x – u)₃ + p не в четырехмерном, а в трехмерном пространстве (x, p, y), где разным значениям uc соответствуют разные функции y(x, uc, p), то в этом случае мы тоже можем говорить о дифференциалах dy(x, uc, p), но эти дифференциалы – разные для разных единичных функций y(x, uc, p). Например, для y = 3(x – 2)₃ + p и y = 3(x – 6.73)₃ + p они будут равны: dy(x, 2, p) = (∂y(x, 2, p)/∂x)dx + (∂y(x, 2, p)/∂p)dp = 9(x – 2)₂dx + dp dy(x, 6.73, p) = (∂y(x, 6.73, p)/∂x)dx + (∂y(x, 6.73, p)/∂p)dp = 9(x – 6.73)₂dx + dp Соответственно, в трехмерном пространстве (x, p, y) рассматриваться эти дифференциалы должны по отдельности для каждой функции y(x, uc, p). Назовем такие дифференциалы не полными, а единичными (singular differentials). (((Я бы, возможно, предпочел использовать термин частные дифференциалы, но он уже занят.)))
|
|
|
ОТВЕТЫ (5)

|
BUR ( Слушатель ) |
| 21 мая 2011 в 02:05 |
Цитата: Yuri Rus от 12.04.2011 09:20:01
partial
аналогично терминам - давление, парциальное давление
И при анализе уравнений с параметрами всегда принимается (аксиома!), что параметр это константа, т.е. ∂u = du = 0;
Если параметр не константа, то он считается переменной, на уровне формализма добавляется в список параметров (как Вы и сделали) и далее "как всегда".
По сути Вам не нужно вводить новые сущности (единичный дифференциал соответствует классическому частному дифференциалу в задаче большей размерности (там, где параметр стал переменной)).
То что уже прочитал - вы не опровергаете Матфизику, но меняете постановку задачи (что можно только приветствовать!!!), делая следующее приближение.
Под "следующим приближением" имеется в виду, например, такой ряд задач:
1. Просто неподвижный заряд
2. Заряд "сдвинувшийся на совсем мало" (неподвижный "источник волны")
3. Равномерно медленно движущийся заряд
4. Равномерно медленно движущийся "источник волны"
5. и т.д.
Поэтому естественно то, что при одном приближени было параметром (т.е. константой) при другом становится переменной.
Однородное волновое уравнение описывает распространение невзаимодействующих волн (линейная суперпозиция т.е. амплитуда волны считается бесконечно малой) в среде без источноков.
- +0.00 / 0
-

|
Yuri Rus ( Слушатель ) |
| 21 мая 2011 в 19:45 |
Цитата: BUR от 21.05.2011 02:05:32
Я бы рад не вводить новые сущности, но ведь учебники-то по физике пока не переписали, а потому мне надо как-то объяснить разницу между принятым в физике понятием полного дифференциала и более общим понятием, которое я ввожу. А введение специального термина часто единственный путь к краткости, иначе вместо одного слова каждый раз придется давать его полное определение.
Далее - я не опровергаю математику. Но пытаюсь показать, что многие принятые в мат. физике понятия и формулы неверны. Дело в том, что мат. физика имеет блочную структуру. Однажды выведенная формула, после первого периода критики и экспериментальной проверки, становится "блоком", кирпичом в строительстве следующих этажей физики. В дальнейшем, эта формула просто считается истинной и ее применяют для вывода каких-то других формул, более не подвергая ее саму сомнению. Примеры: Второй Закон Ньютона, Второй Закон Термодинамики и Принцип Неопределености Гейзенберга. Их просто применяют, как инструменты решения каких-то новых физических задач, почти никогда не ставя вопрос о том, справедливы ли сами эти законы и если да, то в какой области параметров.
Я пытаюсь показать, что на довольно раннем этапе развития физики при создании некоторых ключевых блоков были допущены ошибки. Математика-то в целом верна, но ее применение к созданию определенных физических моделей было неверным. Поскольку этого никто не заметил в первый, "критический" период жизни этих моделей, в последующие уже даже не десятилетия, а столетия, эти модели, эти формулы вошли в виде блоков во все остальное здание мат. физики. И здание это, в итоге, стоит на очень шатком основании.
Чтобы распутать этот детектив, я и начал с анализа единичных vs. полных функций, дифференциалов и волн. Особую роль, по моему мнению, сыграли ошибки в анализе линейного неоднородного волнового уравнения с движущимся источником. Поэтому я уделяю этому уравнению основное внимание.
Цитата: BUR от 21.05.2011 02:05:32
Всё верно - принцип суперпозиции выполняется только для линейного однородного волнового уравнения. Но не для неоднородного - и в особенности он не выполняется для движущегося источника. Это как раз я и считаю главной ошибкой мат. физики.
- +0.00 / 0
-
|
|
BUR ( Слушатель ) |
| 23 мая 2011 в 16:31 |
Цитата: Yuri Rus от 21.05.2011 19:45:13
Да не вводите вы нового.. вы переводите то, что было параметром модели в переменную, создавая новую, более сложную модель. Не вводите новых сущностей там, где их нет.
Цитата: Yuri Rus от 21.05.2011 19:45:13
Вы путате модели, которые имеют ограниченную область применимости (то что Вы называете "формулы") и понятия.
Цитата: Yuri Rus от 21.05.2011 19:45:13
Сознательное упрощение модели, чтобы получить достаточные (на момент создания упрощенной модели) результаты делается сознательно (хотя при этом выглядит типа "а выкинем тот небольший член, который не можем аналитически посчитать" довольно волюнтаристски) и "главной ошибкой матфизики" не является. Это сознательно сделанное упрощение. Вы можете столь-же сознательно его не делать и продвинуться на шаг дальше или упереться в недостаточность мат. аппарата и будете вынуждены упрощать модель...
- +0.00 / 0
-
|
|
Yuri Rus ( Слушатель ) |
| 23 мая 2011 в 20:46 |
Цитата: BUR от 23.05.2011 16:31:18
Мне, честно говоря, стало непонятно, о чем мы спорим. Сначала вроде разговор шел о том, что мне не было необходимости вводить новые сущности (я понял так, что Вы имели в виду новые термины - единичный vs. полный дифференциалы, и ответил, что без нового термина пока что не обойтись), потому что то, что я пишу, вполне в рамках мат. физики, просто то, что раньше считалось параметрами, я считаю полноценными переменными. Сейчас же, если я правильно Вас понял, Вы утверждаете, что переводя некую величину, которая в более ранних моделях считалась параметром, в статус полноценной переменной, мы получим новую, более полную модель, но старая модель при этом все равно останется справедливой (в своей области параметров). Более того, Вы утверждаете, что более ранние модели (с параметрами вместо переменных) делали это упрощение сознательно. И это не является "главной ошибкой мат. физики" - если же усилить Вашу мысль, то это вообще не является ошибкой, просто "старая" модель имеет свою область применимости, где она справедлива (так большинство формул физики имеют ограниченную область применимости, это нормально).
Вообще-то, главной ошибкой мат. физики я называл не это, а неправильное решение неоднородного волнового уравнения (до детального объяснения того, в чем же здесь ошибка, я пока так и не дошел; но дойду). Теперь, насколько важно это различие - параметр или переменная. На первой странице ветки, я приводил цитаты из книг Leigh Page и Petr Beckmann, в которых на основании определения полного дифференциала, зависящего только от переменных x, y, z и t, выводилось сжатие поля и частиц в гамма раз. То есть, неверное (как я считаю) понимание того, что является параметром, а что переменной, привело к тому, что физика более чем на столетие погрузилась в бесплодную схоластику. Я сейчас как раз нашел подобную аргументацию на русском языке (на первой странице ветки я спрашивал, не встречал ли кто что-то подобное на русском; но теперь заменить текст Leigh Page я не могу, потому что цитирую его много раз). Более того, в данной книге на этом аргументе (то есть на определении полного дифференциала) построен весь вывод теории относительности, ее обоснование. Так что, для целей демонстрации важности понимания того, сколько же у нас переменных, эта книга еще лучше.
Итак, Беккер Р. «Теория Электричества. Том 2. Электронная теория» (1941), стр. 44, 48-52:
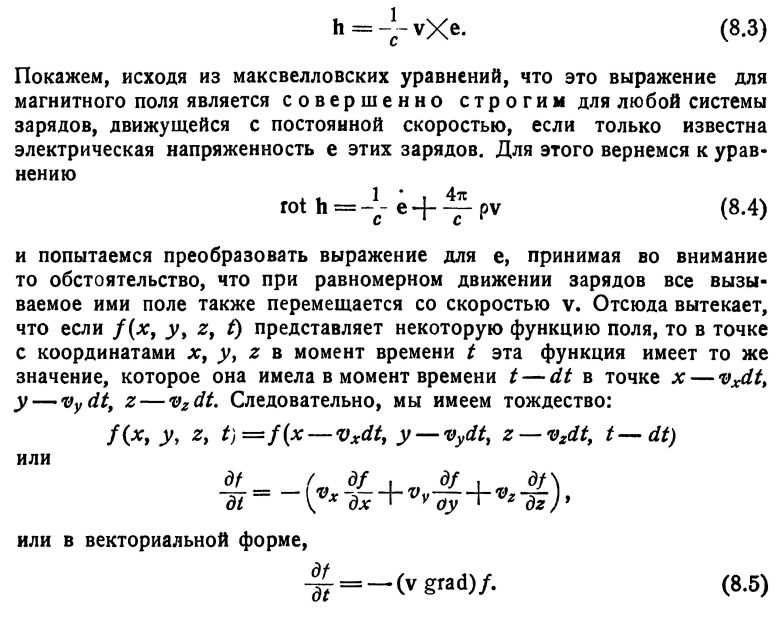
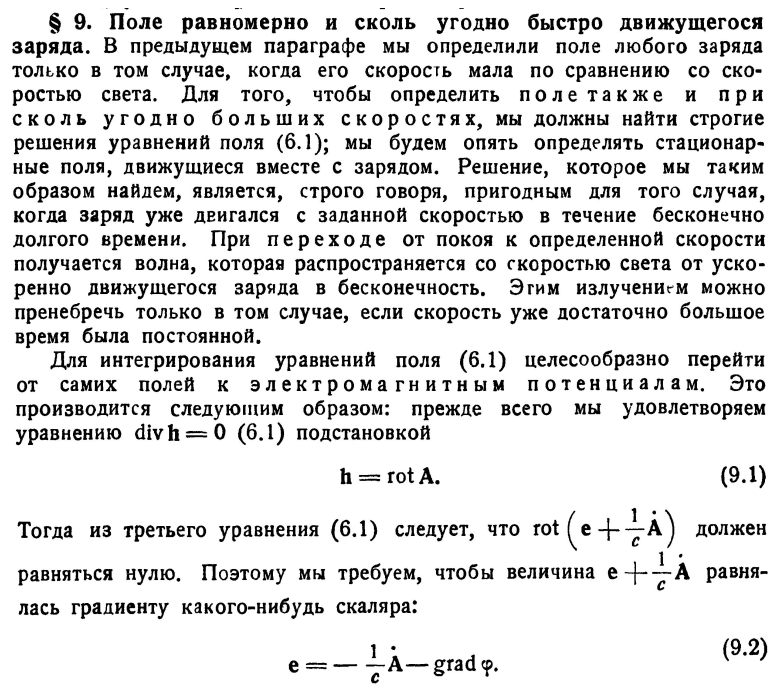
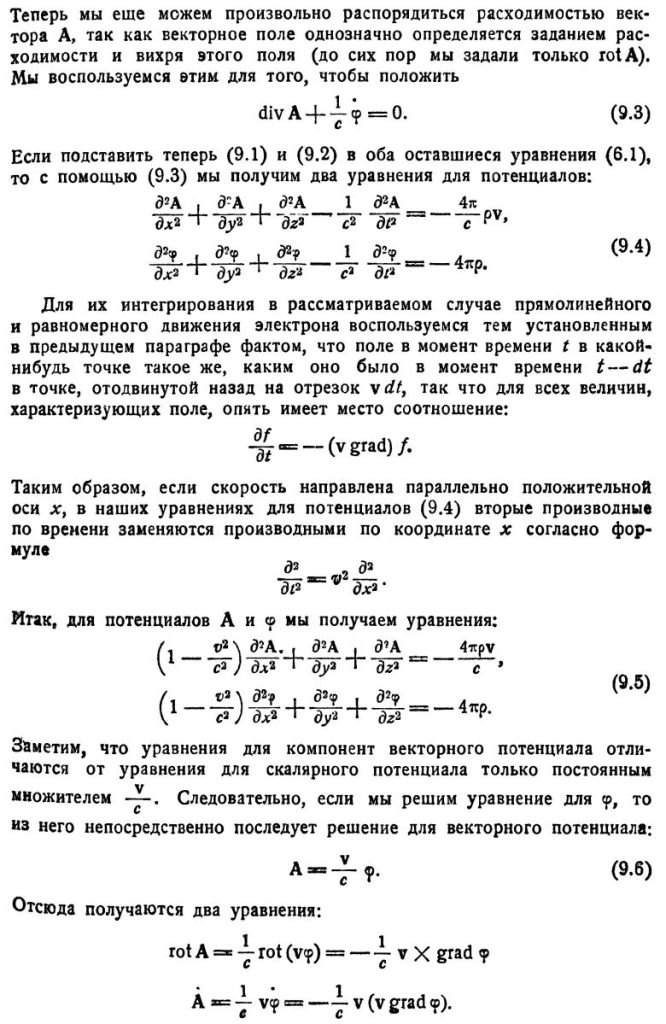
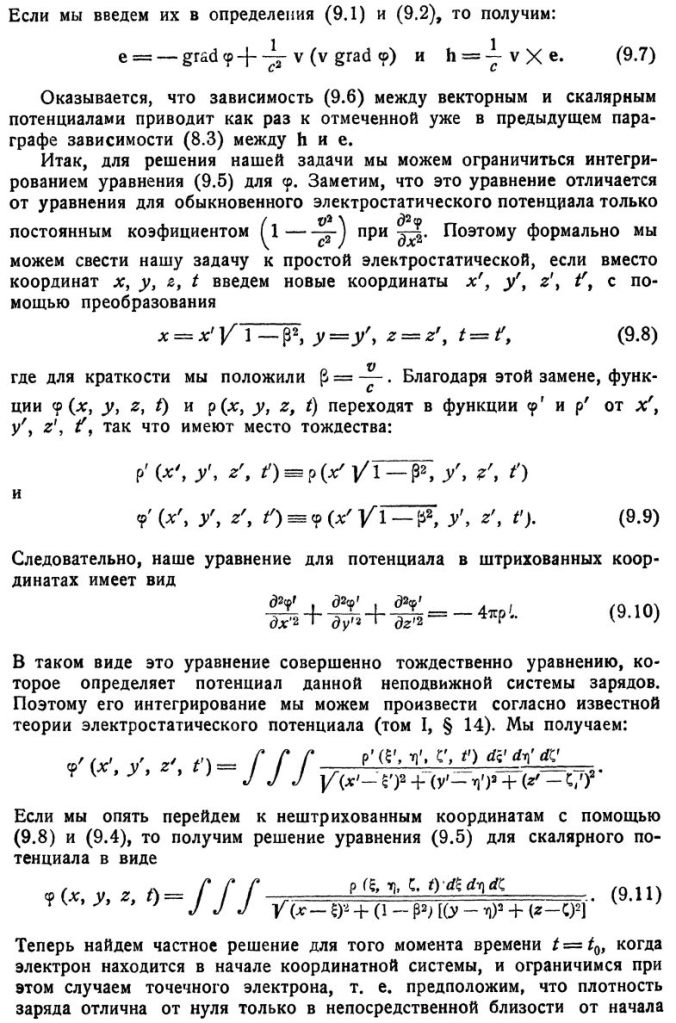
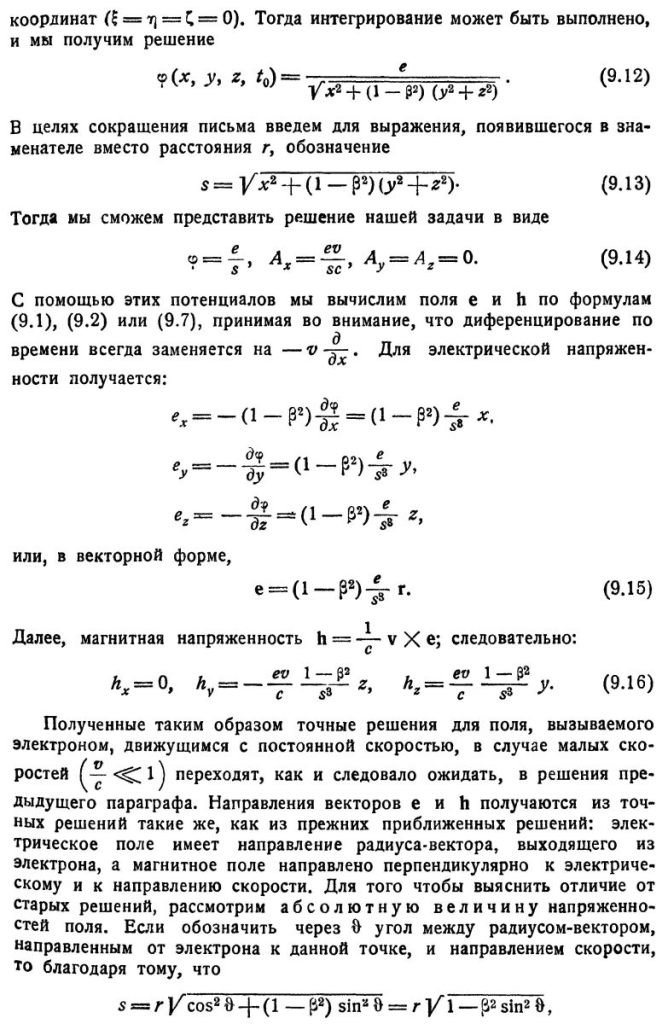
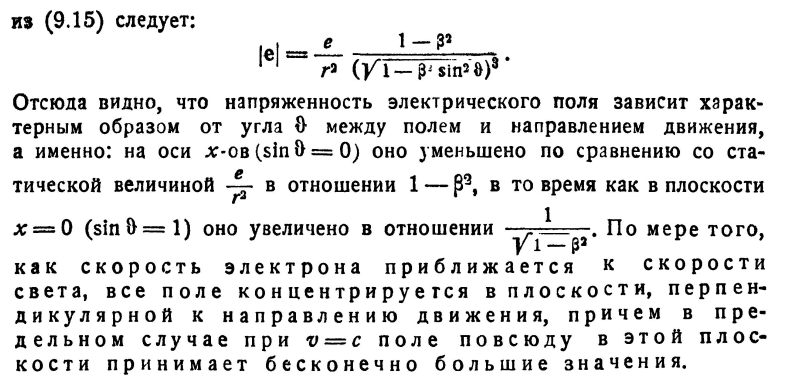
И так далее - потом выводятся все остальные уравнения ТО. Подчеркиваю – выводятся из неправильного определения того, сколько переменных имеется в уравнениях для электрического и магнитного полей (или потенциалов φ и A).
Но дело обстоит еще интереснее. Даже если в уравнениях физики некоторые величины явным образом вводятся как переменные (а не параметры), к ним все равно не относятся как к переменным (например, их частные производные все равно не входят в полный дифференциал соответствующей функции; по ним не дифференцируют и не интегрируют).
В физике есть такое понятие – функции Грина. Если посмотреть на функции Грина для волнового уравнения с движущимся источником, то, безусловно, они выглядят очень близкими по смыслу к тому, о чем писал я.
Джексон Дж. «Классическая электродинамика» (1965), стр. 209-212:

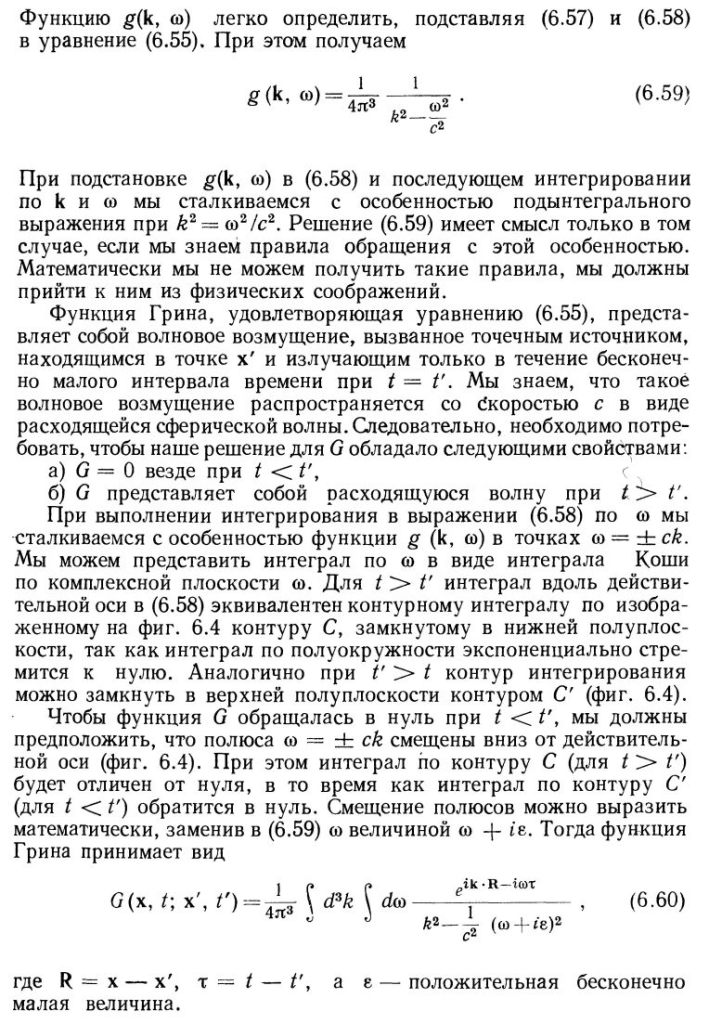


Казалось бы, векторы x, из начала координат к произвольной точке пространства (x, y, z) в момент времени t, и x', из начала координат к источнику (x’, y’, z’) в запаздывающий момент времени t’, являются точно такими же переменными, как у меня (x, y, z), для произвольной точки пространства в момент t, и (ξ, η, ζ), для положения источника в момент ԏ. Что еще нужно?
И тем не менее, разница есть, и существенная. Я говорю, что все 6 пространственных координат и 2 временные являются переменными и относиться к ним надо соответственно. Например, включать их частные производные в определение полного дифференциала и полной производной по времени. Например, интегрировать по всем 6 пространственным координатам, а не только по 3 из них; по 2 временным координатам, а не по одной. Между прочим, для запаздывающих функций обычно интегрируют по запаздывающим координатам источника и по запаздывающему времени, а не по координатам точки наблюдения в настоящий момент времени. При этом, координаты (x, y, z) и время t вообще не учитываются (они являются параметрами, в Вашей трактовке?). А если речь идет о сравнении "замороженного" поля частицы в точке (x, y, z) в момент t и в точке (x + vdt, y, z) в момент t + dt, то внезапно забывают про переменные координаты (x', y', z' ) и время t' и перепрыгивают на x, y, z, t.
Это всё имеет совсем другой математический смысл – и приводит совсем к другим результатам. Главное здесь то, что эти результаты не «расширяют» старые модели на новые области применения, а отменяют старые результаты – вообще.
- +0.00 / 0
-
|
|
Yuri Rus ( Слушатель ) |
| 24 мая 2011 в 17:58 |
Цитата: Yuri Rus от 23.05.2011 20:46:23
После этого, я хотел написать пару фраз, но забыл:
При этом, координаты (x, y, z) и время t вообще не учитываются (они являются параметрами, в Вашей трактовке?). А если речь идет о сравнении "замороженного" поля частицы в точке (x, y, z) в момент t и в точке (x + vdt, y, z) в момент t + dt, то внезапно забывают про переменные координаты (x', y', z' ) и время t' и перепрыгивают на x, y, z, t.
Я внесу это исправление в оригинальное сообщение.
- +0.00 / 0
-