Российский автопром
1,071,236
6,841

|
slavae ( Слушатель ) |
| 17 июл 2018 в 18:57 |
А вот интересная статья! Как делали БелАЗ и кто ) Часть 1.2
новая дискуссия Дискуссия 228
Система управления
Как всё это железо управляется? В каждом преобразователе стоит свой контроллер. Контроллер в данной терминологии – это такая плата, в основе которой стоит микроконтроллер (процессор с памятью и периферией на кристалле) и его обвязка. В обвязку обычно входит система тактирования и питания, операционные усилители для АЦП, буферные микросхемы для дискретных входов и выходов, драйверы интерфейсов связи. Контроллеры обычно делаются более-менее универсальными и устанавливаются, в зависимости от задачи, в некоторую базовую плату, которая уже содержит все остальное для реализации конкретного устройства.
Все контроллеры соединены по промышленной сети CAN. Почему CAN? Во-первых, это автомобильный стандарт; во-вторых, он достаточно отказоустойчив и нетребователен к кабелям, а в-третьих – там всего три провода.
В нашей реализации КТЭО используется 5 контроллеров. Два на тяговых двигателях, один на преобразователе генератора, один на преобразователе тормозных резисторов, и один в качестве контроллера верхнего уровня в кабине.
Контроллеры генератора и резистора
В качестве контроллера генератора и тормозного резистора мы используем вот такое изделие, плата на основе motor-control микроконтроллера Texas Instruments TMS320F2810 с частотой 150МГц и 64кСлов флеш-памяти.
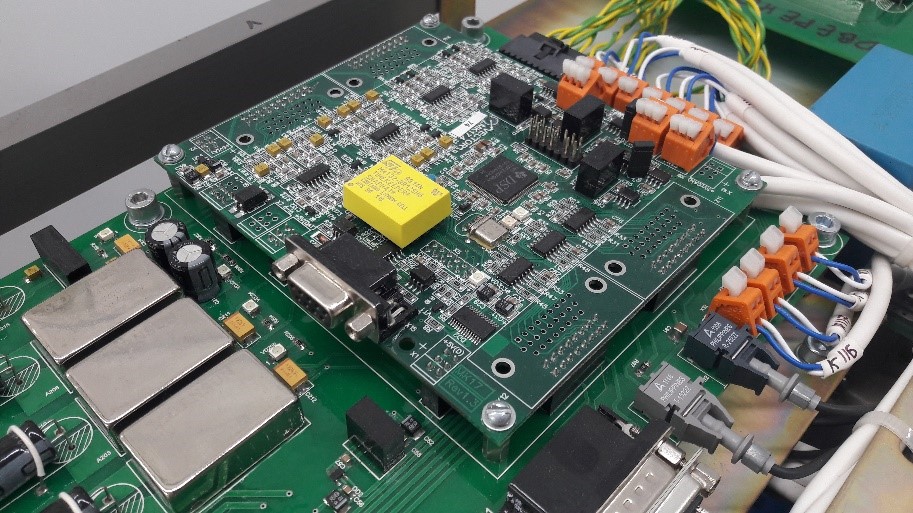
На самом деле, с точки зрения задачи управления ключами преобразователя такому контроллеру там делать нечего – справилась бы, простите за выражение, ардуина. Однако эти контроллеры еще опрашивают кучу датчиков температуры, реализуют кое-какую логику по управлению вентиляторами и насосами блока, участвуют в сетевом обмене по CAN, измеряют частоту вращения генератора и т.п. Поэтому для ускорения сроков разработки и для унификации с другим производимым оборудованием было принято использовать такие, избыточные, но проверенные временем контроллеры.
Контроллер тяговых двигателей
С контроллерами для тяговых двигателей все интереснее. Так как тяговый электродвигатель карьерного самосвала должен выдавать большой момент на низких и нулевых частотах вращения, то это требует проектирования двигателя и преобразователя на большой фазный ток в случае использования обычной трехфазной обмотки двигателя. И так делают многие другие производители, получая амплитудный фазный ток, измеряемый в килоамперах. Это влечет за собой сложности прокладки такого кабеля (с ногу толщиной), дорогие IGBT ключи, низкую частоту коммутации таких ключей.
При конструировании данной машины пошли другим путем и изготовили двигатель 9-ти фазным. Т.е. в нем три независимых сдвинутых трехфазных обмотки. Это позволяет уменьшить токовую нагрузку на каждый провод и ключ, и сделать преобразователь наборным, из однотипных ключей небольшой мощности. Однако с точки зрения системы управления задача усложняется: нужно одним контроллером управлять одновременно 18ю ключами инвертора! И еще дополнительно двумя ключами обмотки возбуждения. При этом так как электрическая машина единая, а трехфазные обмотки индуктивно-связаны, разделить задачу на несколько контроллеров нельзя – требуется синхронизация между всеми таймерами ШИМ, управляющих ключами. На рисунке ниже представлена структура преобразователя тягового двигателя.

Таким образом, был нужен микроконтроллер с минимум 18ю выходами ШИМ (обмоткой возбуждения в силу большой индуктивности можно управлять без применения ШИМ, программно открывая и закрывая ключи в релейном режиме), кучей АЦП, интерфейсом датчика положения ротора (ДПР). И про такой микроконтроллер мы уже писали. Это отечественный микроконтроллер К1921ВК01Т на ARM ядре и частотой 100МГц. Он как раз имеет и 18 ШИМов, и все остальное для управления двигателями. Поэтому мы применили в контроллере именно его, так как разумных альтернатив не так чтобы много.

К слову, для управления тяговыми двигателями используется немного модифицированное для многофазного случая векторное управление, принципы которого подробно описаны в этой статье, а свободная версия ПО, взятая за основу при разработке, находится здесь.
Вот так выглядит открытый шкаф управления с установленными контроллерами. Здесь слева блок тормозного резистора и генератора с двумя контроллерами рядом, далее блоки правого и левого тяговых двигателей. Силовые ключи расположены в глубине, а снаружи видны базовая плата с установленными в нее контроллерами и некоторые силовые шины.

Контроллер верхнего уровня
В качестве контроллера верхнего уровня был разработан отдельный контроллер (для этого и других схожих проектов) на основе двух микроконтроллеров Texas Instruments TMS320F28335. Почему два? Во-первых, в этом устройстве много дискретного и аналогового ввода-вывода, нужно много ножек, во-вторых, нам для некоторых задач нужно было три CAN интерфейса (для разных подсетей автомобиля), а освоенные нами микроконтроллеры имеют только два. Однако конкретно в проекте самосвала второй кристалл не используется (не напаян).

На плате, помимо прочего, можно заметить слот для микро SD карты – туда КВУ сохраняет все логи (весь сетевой обмен) по кругу, стирая старые. Поэтому КВУ выполняет также функции «черного ящика».
Насколько сложно и долго сделать такой КТЭО?
С нуля, без опыта, конечно же нереально. Мы взялись за это потому, что уже делали похожие решения, у нас уже есть опыт в проектировании преобразователей, двигателей, есть освоенное ПО для контроллеров управления и т.п. Т.е. для нас, по сути, это был еще один вариант компоновки того, что мы уже умеем делать. Но так как конструкция так или иначе новая, в процессе испытаний и пусконаладки все равно вылезло несметное число проблем, которые потянули всякие доработки, как аппаратные, так и программные. Но об этом будет подробнее в следующей статье.
По времени разработка заняла примерно два года. От момента начала разговоров о проекте до выкатывания самосвала из цеха своим ходом. Это, на самом деле, очень быстрые темпы. При этом поехать, конечно же, недостаточно. Самое важное, как машина покажет себя в эксплуатации. Какие будут «детские» болезни, какие «взрослые», каков будет ресурс оборудования: это покажет только время. Сейчас машина прошла около 20 000км и продолжает эксплуатироваться.
Заключение
В следующей статье будет рассказано, как проводились испытания оборудования для этого самосвала, будет видео с гудящими приводами, истории об отказах и факапах.
И в качестве небольшой рекламы
Этот проект выполнялся по большей части выпускниками МЭИ. Если Вы хотите узнать больше об электроприводе, гибридных трансмиссиях, системах управления электроприводами и всем вспомогательным оборудованием, изучить применяемые в отрасли микропроцессорные средства, то сообщаем, что кафедра Автоматизированного электропривода (АЭП) НИУ «МЭИ» проводит набор в магистратуру по направлению 13.04.02 «Электроэнергетика и электротехника», программа подготовки – «Электропривод и автоматика».
Как всё это железо управляется? В каждом преобразователе стоит свой контроллер. Контроллер в данной терминологии – это такая плата, в основе которой стоит микроконтроллер (процессор с памятью и периферией на кристалле) и его обвязка. В обвязку обычно входит система тактирования и питания, операционные усилители для АЦП, буферные микросхемы для дискретных входов и выходов, драйверы интерфейсов связи. Контроллеры обычно делаются более-менее универсальными и устанавливаются, в зависимости от задачи, в некоторую базовую плату, которая уже содержит все остальное для реализации конкретного устройства.
Все контроллеры соединены по промышленной сети CAN. Почему CAN? Во-первых, это автомобильный стандарт; во-вторых, он достаточно отказоустойчив и нетребователен к кабелям, а в-третьих – там всего три провода.
В нашей реализации КТЭО используется 5 контроллеров. Два на тяговых двигателях, один на преобразователе генератора, один на преобразователе тормозных резисторов, и один в качестве контроллера верхнего уровня в кабине.
Контроллеры генератора и резистора
В качестве контроллера генератора и тормозного резистора мы используем вот такое изделие, плата на основе motor-control микроконтроллера Texas Instruments TMS320F2810 с частотой 150МГц и 64кСлов флеш-памяти.
На самом деле, с точки зрения задачи управления ключами преобразователя такому контроллеру там делать нечего – справилась бы, простите за выражение, ардуина. Однако эти контроллеры еще опрашивают кучу датчиков температуры, реализуют кое-какую логику по управлению вентиляторами и насосами блока, участвуют в сетевом обмене по CAN, измеряют частоту вращения генератора и т.п. Поэтому для ускорения сроков разработки и для унификации с другим производимым оборудованием было принято использовать такие, избыточные, но проверенные временем контроллеры.
Контроллер тяговых двигателей
С контроллерами для тяговых двигателей все интереснее. Так как тяговый электродвигатель карьерного самосвала должен выдавать большой момент на низких и нулевых частотах вращения, то это требует проектирования двигателя и преобразователя на большой фазный ток в случае использования обычной трехфазной обмотки двигателя. И так делают многие другие производители, получая амплитудный фазный ток, измеряемый в килоамперах. Это влечет за собой сложности прокладки такого кабеля (с ногу толщиной), дорогие IGBT ключи, низкую частоту коммутации таких ключей.
При конструировании данной машины пошли другим путем и изготовили двигатель 9-ти фазным. Т.е. в нем три независимых сдвинутых трехфазных обмотки. Это позволяет уменьшить токовую нагрузку на каждый провод и ключ, и сделать преобразователь наборным, из однотипных ключей небольшой мощности. Однако с точки зрения системы управления задача усложняется: нужно одним контроллером управлять одновременно 18ю ключами инвертора! И еще дополнительно двумя ключами обмотки возбуждения. При этом так как электрическая машина единая, а трехфазные обмотки индуктивно-связаны, разделить задачу на несколько контроллеров нельзя – требуется синхронизация между всеми таймерами ШИМ, управляющих ключами. На рисунке ниже представлена структура преобразователя тягового двигателя.
Таким образом, был нужен микроконтроллер с минимум 18ю выходами ШИМ (обмоткой возбуждения в силу большой индуктивности можно управлять без применения ШИМ, программно открывая и закрывая ключи в релейном режиме), кучей АЦП, интерфейсом датчика положения ротора (ДПР). И про такой микроконтроллер мы уже писали. Это отечественный микроконтроллер К1921ВК01Т на ARM ядре и частотой 100МГц. Он как раз имеет и 18 ШИМов, и все остальное для управления двигателями. Поэтому мы применили в контроллере именно его, так как разумных альтернатив не так чтобы много.
К слову, для управления тяговыми двигателями используется немного модифицированное для многофазного случая векторное управление, принципы которого подробно описаны в этой статье, а свободная версия ПО, взятая за основу при разработке, находится здесь.
Вот так выглядит открытый шкаф управления с установленными контроллерами. Здесь слева блок тормозного резистора и генератора с двумя контроллерами рядом, далее блоки правого и левого тяговых двигателей. Силовые ключи расположены в глубине, а снаружи видны базовая плата с установленными в нее контроллерами и некоторые силовые шины.
Контроллер верхнего уровня
В качестве контроллера верхнего уровня был разработан отдельный контроллер (для этого и других схожих проектов) на основе двух микроконтроллеров Texas Instruments TMS320F28335. Почему два? Во-первых, в этом устройстве много дискретного и аналогового ввода-вывода, нужно много ножек, во-вторых, нам для некоторых задач нужно было три CAN интерфейса (для разных подсетей автомобиля), а освоенные нами микроконтроллеры имеют только два. Однако конкретно в проекте самосвала второй кристалл не используется (не напаян).
На плате, помимо прочего, можно заметить слот для микро SD карты – туда КВУ сохраняет все логи (весь сетевой обмен) по кругу, стирая старые. Поэтому КВУ выполняет также функции «черного ящика».
Насколько сложно и долго сделать такой КТЭО?
С нуля, без опыта, конечно же нереально. Мы взялись за это потому, что уже делали похожие решения, у нас уже есть опыт в проектировании преобразователей, двигателей, есть освоенное ПО для контроллеров управления и т.п. Т.е. для нас, по сути, это был еще один вариант компоновки того, что мы уже умеем делать. Но так как конструкция так или иначе новая, в процессе испытаний и пусконаладки все равно вылезло несметное число проблем, которые потянули всякие доработки, как аппаратные, так и программные. Но об этом будет подробнее в следующей статье.
По времени разработка заняла примерно два года. От момента начала разговоров о проекте до выкатывания самосвала из цеха своим ходом. Это, на самом деле, очень быстрые темпы. При этом поехать, конечно же, недостаточно. Самое важное, как машина покажет себя в эксплуатации. Какие будут «детские» болезни, какие «взрослые», каков будет ресурс оборудования: это покажет только время. Сейчас машина прошла около 20 000км и продолжает эксплуатироваться.
Заключение
В следующей статье будет рассказано, как проводились испытания оборудования для этого самосвала, будет видео с гудящими приводами, истории об отказах и факапах.
И в качестве небольшой рекламы
Этот проект выполнялся по большей части выпускниками МЭИ. Если Вы хотите узнать больше об электроприводе, гибридных трансмиссиях, системах управления электроприводами и всем вспомогательным оборудованием, изучить применяемые в отрасли микропроцессорные средства, то сообщаем, что кафедра Автоматизированного электропривода (АЭП) НИУ «МЭИ» проводит набор в магистратуру по направлению 13.04.02 «Электроэнергетика и электротехника», программа подготовки – «Электропривод и автоматика».
ОТВЕТЫ (0)
Комментарии не найдены!