Обсуждение космических программ
9,337,763
41,759

|
osankin ( Слушатель ) |
| 28 ноя 2023 07:27:00 |
28 ноября 1964 года 59 лет назад запущен американский межпланетный зонд «Маринер-4» для изучения Марса
новая дискуссия Новость 288
«Маринер-4»
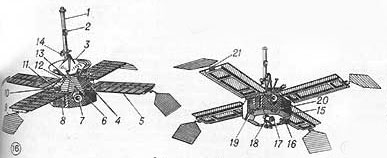
Космический аппарат «Маринер IV».
1 - всенаправленная антенна с низким коэффициентом усиления; 2 - магнитометр; 3 - отражатель направленной антенны с высоким коэффициентом усиления; 4 - эталоны коэффициента поглощения солнечного излучения; 5 - панель с солнечными элементами; 6 - первичный солнечный датчик; 7 - ЖРД корректирующей двигательной установки; 8 - жалюзи системы терморегулирования; 9 - солнечный парус; 10 - приборы для регистрации заряженных частиц; 11 - детектор солнечной плазмы; 12 - детектор метеорных частиц; 13 - подставка для отражателя направленной антенны (3); 14 - приборы для исследования космических лучей; 15 - один из восьми отсеков корпуса; 16 - датчик направления на звезду Канопус; 17 - телекамера; 18 -датчики направления на Марс; 19 - «телескоп»; 20 - вторичный солнечный датчик; 21 - управляющие реактивные сопла.
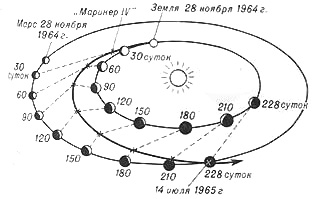
Схема расчетной траектории полета аппарата «Маринер IV» к Марсу.
28 ноября 1964 14:22:01 - старт
5 декабря 1964 - коррекция
15 июля 1965 - совершил пролет в СД Марса с фотографированием
21 (31) декабря 1967 - потеря связи
гелиоцентрическая орбита
Ежегодник 1965 г
«Маринер IV». Запущен 28 ноября с мыса Кеннеди ракетой-носителем «Атлас-Аджена». Вывод второй ступени ракеты с аппаратом на траекторию полета к Марсу был осуществлен с промежуточной круговой орбиты высотой 185км.После отделения аппарата от второй ступени (через 45 мин. после старта) он был ориентирован относительно Солнца, а через 16 час. 37 мин. после старта началась ориентация аппарата относительно звезды Канопус, которую удалось захватить только 30 ноября. Заданная ориентация аппарата относительно Солнца и звезды Канопус должна поддерживаться в течение всего полета, за исключением периода коррекции траектории, когда аппарат теряет Солнце и звезду Канопус, но затем снова ориентируется по ним. Коррекция траектории была проведена 5 декабря, аппарат вышел на траекторию, близкую к расчетной (рис. 18), и, согласно расчетам, 14 июля 1965 г. должен пройти мимо Марса на расстоянии ~8700км,что обеспечит выполнение всех поставленных задач.
Высота аппарата (рис. 16, 17) 2,9м,размах 6,9м, вес 260,8кг.Корпус аппарата, изготовленный из магниевого сплава, имеет форму восьмигранной призмы (диаметр описанной окружности 1,27м),разделенной на восемь отсеков, в которых размещается различное оборудование. К корпусу аппарата прикреплены четыре панели с солнечными элементами, к концам панелей присоединены «солнечные паруса». Панели и паруса развертываются после выхода аппарата на траекторию полета к Марсу. На аппарате установлены научные приборы: магнитометр для измерения напряженности магнитного поля по трем осям; три счетчика Гейгера-Мюллера и детектор на кремниевом диоде, предназначенные для регистрации, определения типа и энергетического спектра заряженных частиц; детектор солнечной плазмы для регистрации идущего от Солнца потока протонов, позволяющий определить скорость, энергетический спектр, плотность, температуру и направление потока; ионизационная камера и счетчик Гейгера-Мюллера для исследования космических лучей; «телескоп» (система из трех детекторов) для регистрации заряженных частиц в космических лучах; детектор метеорных частиц, позволяющий регистрировать частицы (весом от 10-13ги выше) и их распределение вблизи Земли и в межпланетном пространстве. Приборы начали работать немедленно после вывода аппарата на траекторию полета к Марсу (детектор солнечной плазмы вышел из строя). Установленная на борту телевизионная камера должна включиться только при прохождении аппарата мимо Марса, она рассчитана на получение 22 кадров, охватывающих участок поверхности Марса размером ~ 300 х 300км.
Бортовая система связи и телеметрии включает: командный приемник, два передатчика, две антенны, устройство для записи телевизионных изображений и другое оборудование. На аппарат может быть передано до 30 различных команд. Команда на проведение коррекции траектории записывается в память вычислительного и программного устройства (ВПУ), а остальные выполняются немедленно.
ВПУ предназначено для расчетов и выдачи команд на выполнение следующих операций: развертывание панелей с солнечными элементами; включение системы ориентации и стабилизации; развертывание солнечных парусов; включение датчика направления на звезду Канопус; ориентация аппарата перед включением корректирующей двигательной установки (КДУ); включение и отсечка КДУ, работающей на продуктах разложения безводного гидразина (тяга 23кг);изменение скорости передачи телеметрической информации; переключение (в марте 1965 г.) радиоаппаратуры с всенаправленной антенны на направленную, которая с этого момента постоянно направлена на Землю; включение датчиков направления на Марс и телевизионной камеры; включение оборудования, обеспечивающего передачу записанных телевизионных изображений и показаний научных приборов после пролета Марса.
Основными управляющими органами системы ориентации и стабилизации служат 12 реактивных сопел, установленных на панелях с солнечными элементами; в качестве вспомогательных органов стабилизации используются четыре солнечных паруса. Парус - алюминиевый каркас, обтянутый майларовой пленкой с алюминиевым покрытием. Площадь паруса 0,65 м2.
Система терморегулирования аппарата предусматривает использование теплоизоляции, жалюзи и специальных красок. Источниками электроэнергии служат 28224 солнечных элемента и подзаряжаемая ими серебряно-цинковая батарея, которая обеспечивает электропитание до развертывания панелей и ориентации аппарата относительно Солнца, а также в период коррекции траектории полета. Мощность, обеспечиваемая солнечными элементами, в начале полета 640 w, вблизи Марса- 310 w. Емкость батареи в начале полета 1200 w-час, вблизи Марса - 900 w-час.
«Маринер-4». Первый, кто достиг Марса


Технические специалисты работают над зондом «Маринер-4» перед запуском. НАСА/Лаборатория реактивного движения.
Прыжок в неизвестность. Первая успешная миссия на Марс.

Аппараты, которые смогли

История исследования Марса
Беспилотные полёты на Марс: хронология
Покорение Марса: история и будущее космических программ
Полвека исследований Марса
Космический аппарат «Маринер IV».
1 - всенаправленная антенна с низким коэффициентом усиления; 2 - магнитометр; 3 - отражатель направленной антенны с высоким коэффициентом усиления; 4 - эталоны коэффициента поглощения солнечного излучения; 5 - панель с солнечными элементами; 6 - первичный солнечный датчик; 7 - ЖРД корректирующей двигательной установки; 8 - жалюзи системы терморегулирования; 9 - солнечный парус; 10 - приборы для регистрации заряженных частиц; 11 - детектор солнечной плазмы; 12 - детектор метеорных частиц; 13 - подставка для отражателя направленной антенны (3); 14 - приборы для исследования космических лучей; 15 - один из восьми отсеков корпуса; 16 - датчик направления на звезду Канопус; 17 - телекамера; 18 -датчики направления на Марс; 19 - «телескоп»; 20 - вторичный солнечный датчик; 21 - управляющие реактивные сопла.
Схема расчетной траектории полета аппарата «Маринер IV» к Марсу.
28 ноября 1964 14:22:01 - старт
5 декабря 1964 - коррекция
15 июля 1965 - совершил пролет в СД Марса с фотографированием
21 (31) декабря 1967 - потеря связи
гелиоцентрическая орбита
Ежегодник 1965 г
«Маринер IV». Запущен 28 ноября с мыса Кеннеди ракетой-носителем «Атлас-Аджена». Вывод второй ступени ракеты с аппаратом на траекторию полета к Марсу был осуществлен с промежуточной круговой орбиты высотой 185км.После отделения аппарата от второй ступени (через 45 мин. после старта) он был ориентирован относительно Солнца, а через 16 час. 37 мин. после старта началась ориентация аппарата относительно звезды Канопус, которую удалось захватить только 30 ноября. Заданная ориентация аппарата относительно Солнца и звезды Канопус должна поддерживаться в течение всего полета, за исключением периода коррекции траектории, когда аппарат теряет Солнце и звезду Канопус, но затем снова ориентируется по ним. Коррекция траектории была проведена 5 декабря, аппарат вышел на траекторию, близкую к расчетной (рис. 18), и, согласно расчетам, 14 июля 1965 г. должен пройти мимо Марса на расстоянии ~8700км,что обеспечит выполнение всех поставленных задач.
Высота аппарата (рис. 16, 17) 2,9м,размах 6,9м, вес 260,8кг.Корпус аппарата, изготовленный из магниевого сплава, имеет форму восьмигранной призмы (диаметр описанной окружности 1,27м),разделенной на восемь отсеков, в которых размещается различное оборудование. К корпусу аппарата прикреплены четыре панели с солнечными элементами, к концам панелей присоединены «солнечные паруса». Панели и паруса развертываются после выхода аппарата на траекторию полета к Марсу. На аппарате установлены научные приборы: магнитометр для измерения напряженности магнитного поля по трем осям; три счетчика Гейгера-Мюллера и детектор на кремниевом диоде, предназначенные для регистрации, определения типа и энергетического спектра заряженных частиц; детектор солнечной плазмы для регистрации идущего от Солнца потока протонов, позволяющий определить скорость, энергетический спектр, плотность, температуру и направление потока; ионизационная камера и счетчик Гейгера-Мюллера для исследования космических лучей; «телескоп» (система из трех детекторов) для регистрации заряженных частиц в космических лучах; детектор метеорных частиц, позволяющий регистрировать частицы (весом от 10-13ги выше) и их распределение вблизи Земли и в межпланетном пространстве. Приборы начали работать немедленно после вывода аппарата на траекторию полета к Марсу (детектор солнечной плазмы вышел из строя). Установленная на борту телевизионная камера должна включиться только при прохождении аппарата мимо Марса, она рассчитана на получение 22 кадров, охватывающих участок поверхности Марса размером ~ 300 х 300км.
Бортовая система связи и телеметрии включает: командный приемник, два передатчика, две антенны, устройство для записи телевизионных изображений и другое оборудование. На аппарат может быть передано до 30 различных команд. Команда на проведение коррекции траектории записывается в память вычислительного и программного устройства (ВПУ), а остальные выполняются немедленно.
ВПУ предназначено для расчетов и выдачи команд на выполнение следующих операций: развертывание панелей с солнечными элементами; включение системы ориентации и стабилизации; развертывание солнечных парусов; включение датчика направления на звезду Канопус; ориентация аппарата перед включением корректирующей двигательной установки (КДУ); включение и отсечка КДУ, работающей на продуктах разложения безводного гидразина (тяга 23кг);изменение скорости передачи телеметрической информации; переключение (в марте 1965 г.) радиоаппаратуры с всенаправленной антенны на направленную, которая с этого момента постоянно направлена на Землю; включение датчиков направления на Марс и телевизионной камеры; включение оборудования, обеспечивающего передачу записанных телевизионных изображений и показаний научных приборов после пролета Марса.
Основными управляющими органами системы ориентации и стабилизации служат 12 реактивных сопел, установленных на панелях с солнечными элементами; в качестве вспомогательных органов стабилизации используются четыре солнечных паруса. Парус - алюминиевый каркас, обтянутый майларовой пленкой с алюминиевым покрытием. Площадь паруса 0,65 м2.
Система терморегулирования аппарата предусматривает использование теплоизоляции, жалюзи и специальных красок. Источниками электроэнергии служат 28224 солнечных элемента и подзаряжаемая ими серебряно-цинковая батарея, которая обеспечивает электропитание до развертывания панелей и ориентации аппарата относительно Солнца, а также в период коррекции траектории полета. Мощность, обеспечиваемая солнечными элементами, в начале полета 640 w, вблизи Марса- 310 w. Емкость батареи в начале полета 1200 w-час, вблизи Марса - 900 w-час.
«Маринер-4». Первый, кто достиг Марса
Технические специалисты работают над зондом «Маринер-4» перед запуском. НАСА/Лаборатория реактивного движения.
Прыжок в неизвестность. Первая успешная миссия на Марс.
Аппараты, которые смогли
История исследования Марса
Беспилотные полёты на Марс: хронология
Покорение Марса: история и будущее космических программ
Полвека исследований Марса
Отредактировано: osankin - 28 ноя 2023 12:32:40
ОТВЕТЫ (0)
Комментарии не найдены!