БПЛА
1,170,202
4,365
|
|
rusyes ( Слушатель ) |
| 22 апр 2019 14:04:44 |
военная приемка
новая дискуссия Дискуссия 914
выпуск "Антидроны"
вроде свежий выпуск (из новостной ленты)
вроде свежий выпуск (из новостной ленты)
ОТВЕТЫ (43)
|
|
Dmitry1945 ( Слушатель ) |
| 24 апр 2019 19:09:46 |
Цитата: rusyes от 22.04.2019 14:04:44
Современные дроны уже давно ориентируются по камере. Могут работать при полном радиомолчании. Им даже GPS не нужен. Картунку могут передавать а могут и не передавать. И летать могут по программе.
Короче, все поделки из ролика это против игрушек с алиэкспреса. Что-то серьезное они не остановят.
|
|
Равиль ( Специалист ) |
| 24 апр 2019 21:19:29 |
Просьба привести ТТХ и реквизиты изготовителя.
Возьму за любые разумные деньги.
P.S. В данном случае, говорю официально, от лица МО РФ.
|
|
Esploristo ( Слушатель ) |
| 25 апр 2019 01:06:09 |
В некоторых режимах - да... причем не только современные. Еще лет 60-70 назад был разработан ATRAN и DSMAC... В экстремально- корреляционных методах нет ничего нового....https://ru.wikipedia.org/wiki/ATRAN#%D0%98%D1%81%D1%82%D0%BE%D1%80%D0%B8%D1%8F
но недостатки метода НИКУДА не делись...прошел снег, зашло солнце, туман, ночь...и системе невесело. После разрыва видеопотока найти себя заново на карте - как повезет. Над ровным зеленым лесом особенно.
Про TERCOM - пропустим, кто хочет - почитает... https://ru.wikipedia.org/wiki/TERCOM
Потом пришла очередь визуальной одометрии - трехмерный аналог компьютерной мышки, которая просто знает на сколько пикселей относительно подложки она сместилась... Но и это - не вундервафля. Разрыв видеопотока - ( облачко) - система сорвалась. Поворот борта - очень тонкий момент, трек может врать. Чтобы не врал - надо две камеры...а лучше - три.. Восстановить трек - надо узнать высоту над данной конкретной местностью...причем точно, иначе потом ошибка по высоте перейдет в ошибку по координате. В кино там всё отлично, студенты летают у себя в Швейцарии....
В целом, я согласен, что радиоглушилки - это только против бытовых мирных приборов, которые не заточены на борьбу с глушилками. Но визуальные методы - далеко не всегда могут помочь. Хотя простые алгоритмы типа полета над рекой, дорогой и т.п. под силу реализовать на обычном смартфоне...А по глушилкам можно отлично ориенироваться, используя из как маяки для радиополукомпасов....

|
Danila96 ( Слушатель ) |
| 25 апр 2019 04:57:02 |
Ну почему же, квадрат расстояния сильно решает.
Если глушилка близко, а источник сигнала далеко, то точи не точи, но глушилка сделает свое дело.
|
|
Esploristo ( Слушатель ) |
| 25 апр 2019 09:16:44 |
Цитата: Danila96 от 25.04.2019 04:57:02
Глушить мощностью можно ТОЛЬКО если входной каскад задымится и из него искры посыпятся (приемник уйдет в насыщение)... Вытянуть свой сигнал из под помехи - не сложно. Сложно, когда помеха неотличима от своего сигнала - но и там есть способы...В общем, глушить сигналы -это как догонять зайца в поле пешком...
|
|
Danila96 ( Слушатель ) |
| 25 апр 2019 09:44:34 |
Ну я был немного неправ.
Глушилка не в смысле наглухо, а в смысле РЭБ.
Та же "автобаза" посадила топовый амерский БПЛА "сентинель".
Что один человек создал, то другой человек может сломать (с) не помню откуда

|
|
Esploristo ( Слушатель ) |
| 25 апр 2019 09:56:06 |
Цитата: Danila96 от 25.04.2019 09:44:34
Так американцы даже синалы свои не шифровали, ибо полагали что чисто с папусами воюют. Шифрованный сигнал с циклом ключей в год...попробуй что-то подделать.
|
|
Пешеход ( Специалист ) |
| 25 апр 2019 09:46:09 |
Блин, и почему до сих пор та же радиолокация не достигла неограниченной дальности при излучаемых мощностях, стремящихся к нулю. Если энергия сигнала меньше энергии шума/помехи, то хрен что из под них вытащишь. Что собственно и проходят в школьном курсе Радиотехнические системы и Теория передачи информации.
|
|
Esploristo ( Слушатель ) |
| 25 апр 2019 09:54:02 |
Цитата: Пешеход от 25.04.2019 09:46:09
Сигнал из под шума вытягивется оптимальной обработкой. Долго....Увеличение времени обработки эквивалентно повышению сигналшума...термин "корреляция" знаком? мы одну и ту же посылку посылаем 100 раз подряд. После обработки получаем одну, которая в 10 раз мощнее. Это уже первый курс, правда, а не школа....

|
ivan2 ( Слушатель ) |
| 25 апр 2019 10:13:48 |
Не упрощайте. А то вдруг (неожиданно) "шум" окажется не шумом и тоже после Вашей обработки станет в 10 раз мощнее.
Не всё так просто.
|
|
Пешеход ( Специалист ) |
| 25 апр 2019 10:27:05 |
Принцип оптимальной обработки гласит, что амплитуда оптимально обработанного сигнала пропорциональна энергии исходного сигнала. И ни каплей больше. Или другими словами - форма выходного сигнала после оптимальной обработки в отсутствии шумов суть автокорреляционная функция входного. Причем максимум выходного сигнала, по определению автокорреляционной функции, пропорционален энергии сигнала. Чтобы вытащить сигнал кончной мощности из-под любой помехи/шума нужно всего лишь два условия - бесконечность по времени существования сигнала и точно такая же бесконечность по времени его обработки. Школьный курс Радиотехнические системы(с).
|
|
mse ( Специалист ) |
| 25 апр 2019 11:29:26 |
Цитата: Esploristo от 25.04.2019 10:16:44Глушить мощностью можно ТОЛЬКО если входной каскад задымится и из него искры посыпятся (приемник уйдет в насыщение)...
Что за чушь? Тупая китайская глушилка давит всё в округе и никаких искр не сыплется. А там всего делов, генератор шума работает на ГУН и усилок на полватта-ватт. "Из-под помехи" вы выгребете, максимум, 10, ну, накрайняк, 20дб, если ваш полезный сигнал претендует хоть на какую-то разумную полосу частот, а не "сегодня, "1", завтра, "0".
А если вы находитесь в 10 раз ближе к источнику помехи, чем к абоненту, то у Хьюстона могут быть проблемы.
|
|
Esploristo ( Слушатель ) |
| 25 апр 2019 13:05:24 |
Цитата: mse от 25.04.2019 11:29:26
Если она давит широкою полосу- значит плотность в спектре никакая. Если давит прицельно полосу- ППРЧ от неё уходит элементарно. Если имитационная..то имитировать шумоподобные сигналы - имитировалка сотрется, попадать в полиномы и угадывать псевдослучайне последовательности. ДА сигналы с Марса приходят и приходили еще в 70ые от аппаратов у которы мощности были никакие и средств обработки не было, по сравнению с нынешними.

|
slavae ( Слушатель ) |
| 25 апр 2019 09:38:42 |
Неужели в школе не проходили, что расстояние равно скорость умножить на время )
|
|
Esploristo ( Слушатель ) |
| 25 апр 2019 09:50:18 |
Цитата: slavae от 25.04.2019 09:38:42
Ну если вы ВСЕГДА знаете свою путевую скорость - то зачем вам вообще все другие системы навигации??
|
|
slavae ( Слушатель ) |
| 25 апр 2019 13:14:10 |
Я знаю, но с погрешностью. Поэтому на протяжении полёта над облаком вижу вполне допустимым текущую координату вычислять.
|
|
Esploristo ( Слушатель ) |
| 25 апр 2019 13:28:25 |
Цитата: slavae от 25.04.2019 13:14:10
Ну вот потом ровно с этой же погрешностью и возобновится трек... и будет каждую минуту эту погрешность увеличивать...А самое главное - курс и высота...с ними еще хуже. ПОка вы летели над облаком...высота изменилась. По таком треку даже обратно шансов вернуться не очень много, не говоря про то, чтобы прилететь, куда хотели.
|
|
slavae ( Слушатель ) |
| 25 апр 2019 13:59:39 |
Это как это? Вы собираетесь после пролёта облака и возобновления вычисления координат по местности вносить дополнительное смещение? Что за чушь-то? Вы за свой трек говорите, по своему я вернусь, надо просто думать перед программированием.
|
|
Esploristo ( Слушатель ) |
| 25 апр 2019 14:25:32 |
Цитата: slavae от 25.04.2019 13:59:39
Мы говорим о визуальной одометрии или о полете по заранее снятой карте? Я говорю, что после облака построенная карта и трек - разваливаться начнут.
|
|
Dmitry1945 ( Слушатель ) |
| 25 апр 2019 14:36:20 |
Я тоже вклинюсь в дискуссию.
Визуальная одометрия включает в себя в том числе и полет по разведанной карте. Пока вы летите, вы сохраняете все точки привязки. Если у вас есть уже снятая база данных, то нет проблем ее использовать.
Потеря трека не критична, так как происходит не часто, и при наличии разведанной карты, текущие координаты легко восстанавливаются.
Облако само по себе тоже не проблема. Автопилот ведет себя так-же как и человек. Если потеря была кратковременной, от позиция восстанавливается по последним известным точкам привязки. Если вы летели в облаке долго, то восстановление идет по карте, с учетом скорости, направления и т.д. Скорость и компас никто не отменял.
PS. И модератору спасибо что сюда перенес дискуссию.
|
|
slavae ( Слушатель ) |
| 25 апр 2019 14:38:39 |
Видимо, мы говорим о разных вещах. Я про то, что перспективной вижу систему, которая берёт изображение местности со смотрящей вниз камеры, и при помощи нейросети находит свои координаты по совмещению видимого изображения и спутниковых фото данной местности.
|
|
Dmitry1945 ( Слушатель ) |
| 25 апр 2019 15:02:29 |
Цитата: slavae от 25.04.2019 14:38:39
Да, Эсплористо говорит о методе определения местоположения на основе анализа видеопотока и методов на основе эпиполярной геометрии.
Имея последовательность кадров даже с одной камеры, и зная некоторые линейные размеры, мы можем восстановить как 3D сцену (т.е. координаты всех точек в 3D), так и свое местоположение. Для этого нам нужно иметь изображение с камеры и значение высоты, или иметь стереоизображение, хотя бы на начальном этапе. Там математика не сложная, но i7 процессор тянет с трудом. )))
То о чем говорите Вы, это уже следующий этап, когда карта и точки привязки составляются на основе заранее подготовленных снимков. Это немного другое.
|
|
Тимон ( Слушатель ) |
| 30 апр 2019 12:51:15 |
Простите, но как выглядит этот алгоритм, вкраце?
Что то у вас в расчетах избыточно весьма. Для простейшего определения глубины точки интереса по параллельной стереопаре достаточно 20-30 строк кода на... Lua например ) Экспериментально я зафиксировал необходимость в 4000-6000 точек для того, что бы сносно построить представление о глубине картинки и это мизерная величина даже для микроконтроллеров (учитывая, что каждая точка имеет 32бит координаты x|y|z).
То есть для построения облака точек нужно не так уж и много вычислительной мощности, главная работа начинается после - что с этим массивом x|y|z делать и как добыть из него нужную информацию - определить препятствие, определить объект и прочее ))
|
|
Esploristo ( Слушатель ) |
| 30 апр 2019 14:13:46 |
Цитата: Тимон от 30.04.2019 12:51:15
Там в комментариях ссылка...
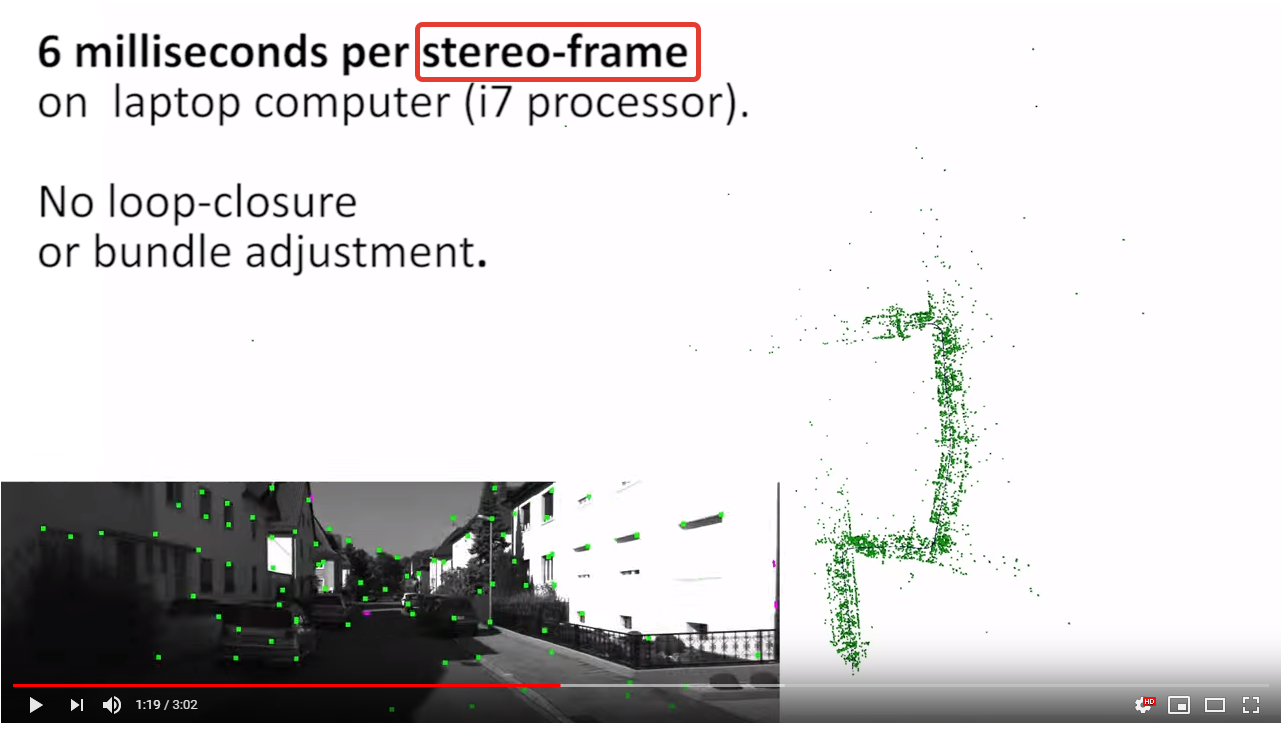
https://www.youtube.com/watch?v=2YnIMfw6bJY&t=3s
|
|
Тимон ( Слушатель ) |
| 30 апр 2019 15:31:45 |
Понятней стало ) Человек использует питон и ноут на i7. Но я бы не сказал что у него i7 как то особенно напрягается, так как 6мс это 166 стереопар в секунду он обрабатывает, что в общем то вполне годно, https://youtu.be/hR8uq1RTUfA?t=79 Точки интереса он дерет на контрастном переходе, но как-то весьма грязно (очень шумно, скорей всего нет динамической адаптации по количеству точек, я не заметил) и с таким шумом наверное да - привязаться к местности можно, но не более того. Сам алгоритм поиска точки интереса по контрастному переходу - это даже не первый курс, это средняя школа (вечерняя причем) )))
А вот тут, в мюнхенской техноложке (группа изучения комп.зрения), все гораздо изящней выглядит - https://www.youtube.…53vJO8eygw тоже работают по контрасту, точек около 10-15 тысяч (что для улицы вполне), мало шума, может фильтр применяют уже в облаке точек или может изначально алгоритмы поиска точки интереса и глубины более умные.
Но да, вариант годный, мне он импонирует тем, что никуда ничем светить не надо.
|
|
СОВ ( Слушатель ) |
| 30 апр 2019 15:48:05 |
Цитата: Тимон от 30.04.2019 15:31:45
О каких стереопарах вы говорите, если вся изюминка проекта в одной камере и матобработке изменения положения выбранных точек на изображении со временем? По изменению монокартинки строится 3d модель окружающего пространства.
|
|
Тимон ( Слушатель ) |
| 30 апр 2019 16:19:09 |
Цитата: СОВ от 30.04.2019 15:48:05
Я только лишь цитирую владельца проекта:
Видимо стерео он тоже пробовал и я упомянул стерео в контексте вычислительной нагрузки. Повторю - на поиске точек интереса нагрузки практически нет, ее так же практически нет и на определении глубины точки интереса. Нагрузка появляется на последующей фильтрации и обработке данных (на определении плоскостей, мусорных данных и прочего).
Цитатаесли вся изюминка проекта в одной камере и матобработке изменения положения выбранных точек на изображении со временем? По изменению монокартинки строится 3d модель окружающего пространства.
Это я понимаю теперь в деталях. Так то у него 2.5мс на кадр (моно), а это 400 кадров в секунду, не думаю, что i7 напрягается неимоверно.
Сам занимаюсь тем-же самым, поэтому и пишу ))
|
|
Esploristo ( Слушатель ) |
| 30 апр 2019 17:53:06 |
Цитата: Тимон от 30.04.2019 15:31:45
Ну не все так шоколадно. Стереопару надо держать горизонтально, если её вертеть - алгоритм усложняется. На пайтоне - обращение к библиотекам, тензорфлоу тоже "работает" на пайтоне. А изображение специально шарпится, я так понимаю, иначе не будет контрастов для привязки.
Там два алгоритма, кстати моно и стерео
|
|
Тимон ( Слушатель ) |
| 30 апр 2019 19:16:09 |
Совершенно не обязательно, саму стереопару можно и даже нужно вертеть и двигать как угодно, это позволяет лучше определять точки интереса (находить дополнительные точки). А вот сами камеры (левая и правая) - да, между собой должны быть снивелированы по горизонтали достаточно точно.
Что касается предварительной обработки изображения - этого можно избежать (и нужно стараться избежать, в целях экономии ресурсов) и работать в адаптивной вилке контрастности сразу на этапе поиска точек интереса.
Поясню, точка интереса это резкий (но всегда градиентный) переход от светлого к темному или наоборот, она имеет координаты X и Y, на второй стереопаре этот переход так же присутствует на Y координате, нужно только его найти начиная с координаты Х. Расстояние до точки по координате Z (глубина) будет выражено в дельте между точкой интереса и точкой найденной на второй паре. Вот градиент точки интереса так же можно заранее определить и искать точку интереса в интересующих вас пределах значений, а не готовить изображение предварительно. Плюс существуют такие неприятности как сумерки (стереопару нельзя нормализовывать по яркости/контрастности, так как изображения с левой и правой камеры всегда разные), засветка, листва на ветру и самое мной не любимое - пестрая одежда ))) которые дают массу мусора с которым потом весьма трудно бороться.
|
|
Esploristo ( Слушатель ) |
| 30 апр 2019 23:02:35 |
Цитата: Тимон от 30.04.2019 19:16:09
Колебания по крену разве не снизят, в целом точность, добавляя шума?
|
|
Тимон ( Слушатель ) |
| 01 май 2019 06:15:46 |
Нет ) В трех метрах от вас есть дверной проем, к примеру. Вам абсолютно все равно под каким углом камеры ищут на нем точки интереса: вертикальные линии этого проема вы поймаете сразу, а горизонтальные - если наклоните камеры на 15-20 градусов. Потому как определение глубины точки происходит исключительно в горизонтальной координате относительно самих камер а не окружающего мира.
У шума другая природа - это в основном точки с бесконечной дальностью и выпадающие точки. Это ошибки в определении глубины на «сломаных» градиентах (серый-черный-белый или наоборот) или поверхностях, где между точкой интереса и искомой точкой размещен еще один экземпляр искомого градиента (как пример - «бок зебры» с расстояния 30см будет содержать ошибки)
|
|
Тимон ( Слушатель ) |
| 01 май 2019 21:21:37 |
Для стереопары - две. Поиск глубины происходит строго горизонтально относительно левой и правой камер, при этом сами камеры (обе сразу) могут иметь абсолютно любой угол по любой координате, важно одно - что бы они были параллельны между собой и выровнены по горизонтали. Если это не так - вы найдете только мусорные данные. Глубина есть выражение расстояния между точкой интереса на первом изображении и найденной такой же точкой на втором изображении, поэтому то, что я отметил жирным - весьма важно. Изначально глубина - абсолютно виртуальная, абстрактная величина, которую затем необходимо преобразовать в нужные единицы (метры/дециметры/сантиметры например) как и координаты, если вы строите какую либо модель для оценки пространства.
Я врубился в однокамерный алгоритм полностью ) По сути там та же стереопара но разнесенная во времени/расстоянии, то есть для работы этого алгоритма необходимо постоянное движение. Не знаю, насколько это удобно и универсально, но с точки зрения удешевления устройства наверное неплохо ))
|
|
СОВ ( Слушатель ) |
| 30 апр 2019 16:00:54 |
Сообщение удалено
СОВ
30 апр 2019 19:00:08
СОВ
30 апр 2019 19:00:08
Отредактировано: СОВ - 30 апр 2019 19:00:08
|
|
Esploristo ( Слушатель ) |
| 25 апр 2019 15:38:10 |
Цитата: slavae от 25.04.2019 14:38:39
Именно по этому отказались в массе от таких систем, т.к. подготовка карт требовала чудовищных усилий. Карта в виде картинки слишком изменчива ( выпал снег в мае- не новость) и вчерашняя карта имеет ценность не выше пачки беломора. Нейросеть - не панацея, она всегда что-то да найдет...вопрос это ли мы искали. Впрочем, если работать со свертками, которые будут выделять особые признаки... все признаки связывать воедино...то да, конечно выкрутимся. Просто эта методика - не "в коробке продаётся" и имеет массы разных особых случаев. Даже в СССР такое делали..и историю про внезапный снег мне старшие товарищи как раз рассказали.
В настоящей, болшой навигации курс прокладывают не глядя вних, а глядя вперед ...есть т.н. кроки горизонта, на которых видны профили гор с разных курсов...но над морем это слабо поможет, равно как и карта вниз.