Искусственный интеллект, нейросети
179,360
1,045


Малая Вишера
Карма: -21.94
Регистрация: 12.01.2017
Сообщений: 1,832
Читатели: 1
Регистрация: 12.01.2017
Сообщений: 1,832
Читатели: 1
Цитата: Slav Rus от 12.07.2019 18:02:11
Оказалось, что первое в мире моделирование Вселенной с помощью искусственного интеллекта работает практически также точно, как часы, и поэтому абсолютно непонятно ученым. Исследователи сообщили о новой симуляции 24 июня в журнале «Известия Национальной академии наук». Цель состояла в том, чтобы создать виртуальную версию космоса с целью моделировать различные условия для начала формирования Вселенной, но на данный момент ученые несколько обескуражены, так как сами не понимают каким образом работает их модель.))
«Это похоже на обучение программе распознавания изображений с большим количеством изображений кошек и собак, но вдруг выясняется, что программа способна распознавать слонов», — отметила соавтор исследования Ширли Хо, теоретический астрофизик из Центра вычислительной астрофизики в Нью-Йорке. «Никто не знает, как это происходит, и это большая загадка, которую еще нужно разгадать».
Учитывая огромный возраст и масштабы Вселенной, понимание ее формирования является сложной задачей. Одним из инструментов в наборе инструментов астрофизика является компьютерное моделирование. Однако традиционные модели требуют больших вычислительных ресурсов и времени, поскольку астрофизикам может потребоваться выполнить тысячи симуляций, настраивание различных параметров с целью определить наиболее вероятный сценарий реального мира.https://rwspace.ru/n…llekt.htmlСкрытый текст

Если бы эта модель была верной, то это была бы машина предсказания будущего, но ...
Классический пример ложных выводов на основе ложной модели - не пойми что хотели и не пойми что получили .
"Мне плевать на вас ублюдки.
Я анархо-аморал." (С)
Я анархо-аморал." (С)

Карма: +372.65
Регистрация: 19.01.2009
Сообщений: 281,965
Читатели: 54
Регистрация: 19.01.2009
Сообщений: 281,965
Читатели: 54
Как наказывать ИИ за смерть людей?
Закон это не решит. Производитель тоже. Но появился выход.
Пора признать, не решив этот вопрос, цивилизация не станет человеко-ИИшной. Только решив, как наказывать людей за убийства, люди смогли построить цивилизацию. В итоге люди не перестали убивать. Но вопрос о наказании за убийство позволил избежать логико-этического тупика прогресса. А теперь надо решать по новой.
Теперь на смену цивилизации людей идет человеко-ИИшная. И как теперь наказывать за убийство? Ведь ИИ будет убивать: на войне и без; случайно и умышленно (напр. делая выбор, кого спасать, а кого убить); по одиночке и массово …
Пока ИИ работает в паре с человеком, проблем нет, т.к. спрос за смерть предъявляется человеку. В США за 14 лет ошибки роботизированной хирургии убили 144-ёх. Но хирурги не понесли ответственности за это, т.к. остальные 2+ млн. роботизированных операций, прошли гладко. И, следовательно, роботы делает хирургию более безопасной.
Но ведь и беспилотные авто сделают вождение безопасней. Однако, справедливо отмечает Макс Тегмарк, как с роботизированной хирургией здесь не получится. Как только ИИ останется со смертью один на один, возникает юридический тупик.
«Если появление на дорогах беспилотных автомобилей сохранит жизнь половине от тех 32 тыс., что ежегодно гибнут на дорогах США, то производители таких автомобилей получат не 16 тыс. благодарственных открыток от спасенных, а 16 тыс. исков в защиту погибших. В случае, когда беспилотный автомобиль попадает в аварию и в результате страдают люди, кто должен нести за это ответственность – пассажир авто, владелец или производитель?»
Т.е. все упирается в законы, регулирующие эту область. Но законы пишут политики. И ждать от них интеллектуальных откровений, способных решить этот логико-этический мега-пазл, было бы наивно. Задушить регулированием безопасности отрасль беспилотных авто у себя в стране они могут. Но тогда исследования, а затем и производство просто сбегут в страны с менее требовательными правительствами.
И этот регуляторный тупик касается далеко не только самоуправляемых авто. ИИ для дронов, энергетики, связи, инфраструктуры, оружия … Всюду ИИ будет убивать. И всюду один и тот же регуляторный тупик:
- либо задушить развитие технологии у себя в стране, проиграв из-за этого в международной конкуренции;
- либо забить на регулирование, и будь что будет.
Но ведь и «забить» не спасает. Как только регуляторные ограничения будут сняты, уровень рисков зашкалит. А это дорога в хаос невосполнимых потерь.
Есть ли выход? Jack Clark из Open AI и Gillian K. Hadfield из Универа Торонто считают, что есть.
Они предлагают революционное решение – новый способ регулирования высокорисковых технологий, названный «Регуляторный рынок». Его суть в переходе от двухуровневой системы регуляторных отношений: правительство – бизнес, к трехуровневому: правительство – частно-правовой регулятор – бизнес. Причем отношения между двумя последними будут регулироваться не законами, а деньгами.
Это предложение чем-то напоминает идею правоведа Дэвида Владека сделать ответственным за смерть на дороге … сам автомобиль. Суть в том, чтобы для беспилотных авто требовалась специальная страховка. Те авто, чья страховая история будет чистой, получат премию за свою безопасность. А плохо разработанные модели от небрежного производителя получат право лишь на такие дорогие страховые полисы, что владение ими окажется невыгодным. Так и сложится подобие «Регуляторного рынка».
Предложение по созданию для ИИ «Регуляторного рынка» будет впервые представлено авторами 26-го сентября на конференции «Economics of Artificial Intelligence».
Желающие познакомиться с ним уже сейчас, а заодно протестировать его на кейсе Adversarial-атак на коммерческие дроны, могут это сделать здесь:
http://conference.nb…130053.pdf
P.S. Какой станет Фемида, столкнувшись с таким вызовом?
Возможно, такой:

Самуэль Бак «В поисках портрета Б»

К вопросу о недавней дискуссии здесь.
Закон это не решит. Производитель тоже. Но появился выход.
Пора признать, не решив этот вопрос, цивилизация не станет человеко-ИИшной. Только решив, как наказывать людей за убийства, люди смогли построить цивилизацию. В итоге люди не перестали убивать. Но вопрос о наказании за убийство позволил избежать логико-этического тупика прогресса. А теперь надо решать по новой.
Теперь на смену цивилизации людей идет человеко-ИИшная. И как теперь наказывать за убийство? Ведь ИИ будет убивать: на войне и без; случайно и умышленно (напр. делая выбор, кого спасать, а кого убить); по одиночке и массово …
Пока ИИ работает в паре с человеком, проблем нет, т.к. спрос за смерть предъявляется человеку. В США за 14 лет ошибки роботизированной хирургии убили 144-ёх. Но хирурги не понесли ответственности за это, т.к. остальные 2+ млн. роботизированных операций, прошли гладко. И, следовательно, роботы делает хирургию более безопасной.
Но ведь и беспилотные авто сделают вождение безопасней. Однако, справедливо отмечает Макс Тегмарк, как с роботизированной хирургией здесь не получится. Как только ИИ останется со смертью один на один, возникает юридический тупик.
«Если появление на дорогах беспилотных автомобилей сохранит жизнь половине от тех 32 тыс., что ежегодно гибнут на дорогах США, то производители таких автомобилей получат не 16 тыс. благодарственных открыток от спасенных, а 16 тыс. исков в защиту погибших. В случае, когда беспилотный автомобиль попадает в аварию и в результате страдают люди, кто должен нести за это ответственность – пассажир авто, владелец или производитель?»
Т.е. все упирается в законы, регулирующие эту область. Но законы пишут политики. И ждать от них интеллектуальных откровений, способных решить этот логико-этический мега-пазл, было бы наивно. Задушить регулированием безопасности отрасль беспилотных авто у себя в стране они могут. Но тогда исследования, а затем и производство просто сбегут в страны с менее требовательными правительствами.
И этот регуляторный тупик касается далеко не только самоуправляемых авто. ИИ для дронов, энергетики, связи, инфраструктуры, оружия … Всюду ИИ будет убивать. И всюду один и тот же регуляторный тупик:
- либо задушить развитие технологии у себя в стране, проиграв из-за этого в международной конкуренции;
- либо забить на регулирование, и будь что будет.
Но ведь и «забить» не спасает. Как только регуляторные ограничения будут сняты, уровень рисков зашкалит. А это дорога в хаос невосполнимых потерь.
Есть ли выход? Jack Clark из Open AI и Gillian K. Hadfield из Универа Торонто считают, что есть.
Они предлагают революционное решение – новый способ регулирования высокорисковых технологий, названный «Регуляторный рынок». Его суть в переходе от двухуровневой системы регуляторных отношений: правительство – бизнес, к трехуровневому: правительство – частно-правовой регулятор – бизнес. Причем отношения между двумя последними будут регулироваться не законами, а деньгами.
Это предложение чем-то напоминает идею правоведа Дэвида Владека сделать ответственным за смерть на дороге … сам автомобиль. Суть в том, чтобы для беспилотных авто требовалась специальная страховка. Те авто, чья страховая история будет чистой, получат премию за свою безопасность. А плохо разработанные модели от небрежного производителя получат право лишь на такие дорогие страховые полисы, что владение ими окажется невыгодным. Так и сложится подобие «Регуляторного рынка».
Предложение по созданию для ИИ «Регуляторного рынка» будет впервые представлено авторами 26-го сентября на конференции «Economics of Artificial Intelligence».
Желающие познакомиться с ним уже сейчас, а заодно протестировать его на кейсе Adversarial-атак на коммерческие дроны, могут это сделать здесь:
http://conference.nb…130053.pdf
P.S. Какой станет Фемида, столкнувшись с таким вызовом?
Возможно, такой:
Самуэль Бак «В поисках портрета Б»
К вопросу о недавней дискуссии здесь.
Отредактировано: DeC - 16 сен 2019 12:07:39
Язык ненависти оказывает сдерживающий эффект на демократический дискурс в онлайн-среде. (c) Еврокомиссия
Карма: +372.65
Регистрация: 19.01.2009
Сообщений: 281,965
Читатели: 54
Регистрация: 19.01.2009
Сообщений: 281,965
Читатели: 54
Цитата: xrvr от 16.09.2019 15:33:28Есть еще одна интересная дилемма в этой области.
Допустим, самобеглая повозка, под управлением ИИ, попадают в такую ситуацию, когда ей надо решить за пол секунды, сбить неожиданно выскочившего ребенка на дорогу, и тогда ее пассажиры спасутся, или спасти жизнь ребенку, но тогда ее пассажиры погибнут.
При этом уже есть опасения, что богатенькие, как обычно, смогут себе выбрать авто с ИИ, у которого будет приоритет спасти жизнь им, а не ребенку.
Не очень понял – как (с чего вдруг?) пассажиры погибнут, если спасти жизнь ребенку?
Язык ненависти оказывает сдерживающий эффект на демократический дискурс в онлайн-среде. (c) Еврокомиссия
Южная Сибирь
Карма: +2.68
Регистрация: 09.02.2010
Сообщений: 612
Читатели: 0
Регистрация: 09.02.2010
Сообщений: 612
Читатели: 0
Цитата: Cyclop от 16.09.2019 16:50:44Кто-то навязчиво вбрасывает идею, что ИИ-автопилот - это немеренная юридическая проблема.
Вообще-то нет. В сложных ситуациях ИИ будет ездить медленно и печально, и тормозить в своей полосе.
Так что проблема, скорее, будет в жалобах пассажиров на то, что они добирались вдвое дольше, чем на живом таксисте.
Перенесите гипотетическую ситуацию на лифт, и все будет понятно.
При наличии %%10 автомобилей-роботов мы уже все будем ездить медленно и печально. И постоянные пробки из-за того, что один идиот припарковался в неположенном месте, а другой объехать его не может, ибо для этого придётся на осевую линию наехать.
Карма: +372.65
Регистрация: 19.01.2009
Сообщений: 281,965
Читатели: 54
Регистрация: 19.01.2009
Сообщений: 281,965
Читатели: 54
Цитата: Поверонов от 16.09.2019 21:06:11Например - для спасения ребенка на горной дороге придется свернуть в пропасть...
Тут проблемы нет (и, кстати, не должна машина разбираться в терминах и приёмах постправды). В любом случае отвечает компания-медиатор-страховщик. Понятно что пересмотр страховки беспилотного авто нужно сделать после необходимых разбирательств (записи с камер, черные ящики и тд).
Отредактировано: DeC - 16 сен 2019 21:18:07
Язык ненависти оказывает сдерживающий эффект на демократический дискурс в онлайн-среде. (c) Еврокомиссия

Москва
Карма: +193.86
Регистрация: 21.03.2013
Сообщений: 27,869
Читатели: 7
Регистрация: 21.03.2013
Сообщений: 27,869
Читатели: 7
Отсюда
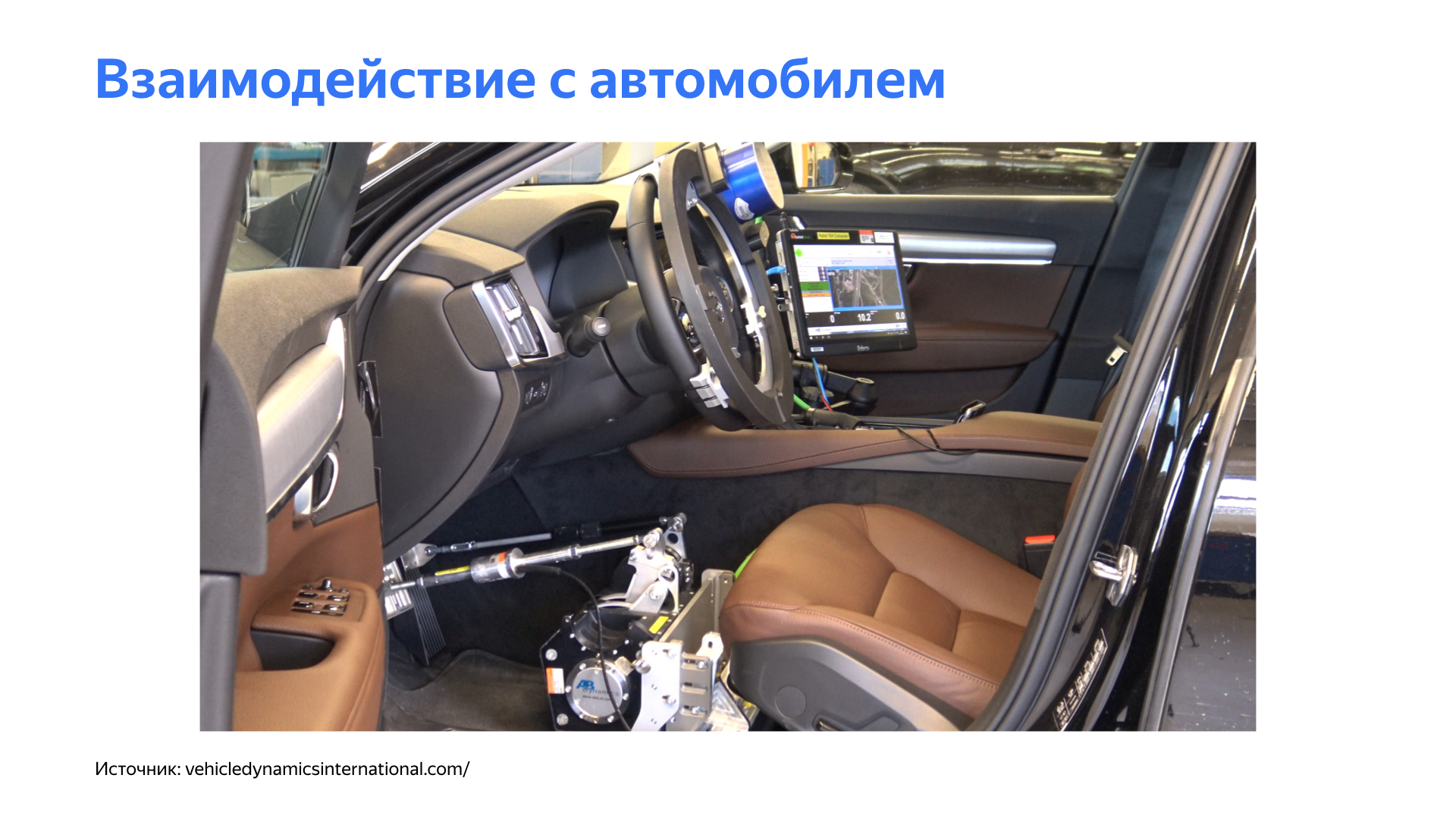
Беспилотный автомобиль: оживляем алгоритмы. Доклад Яндекса
Подробная расшифровка еще одного доклада со встречи Яндекс.Железо — про разработку устройств для беспилотника.
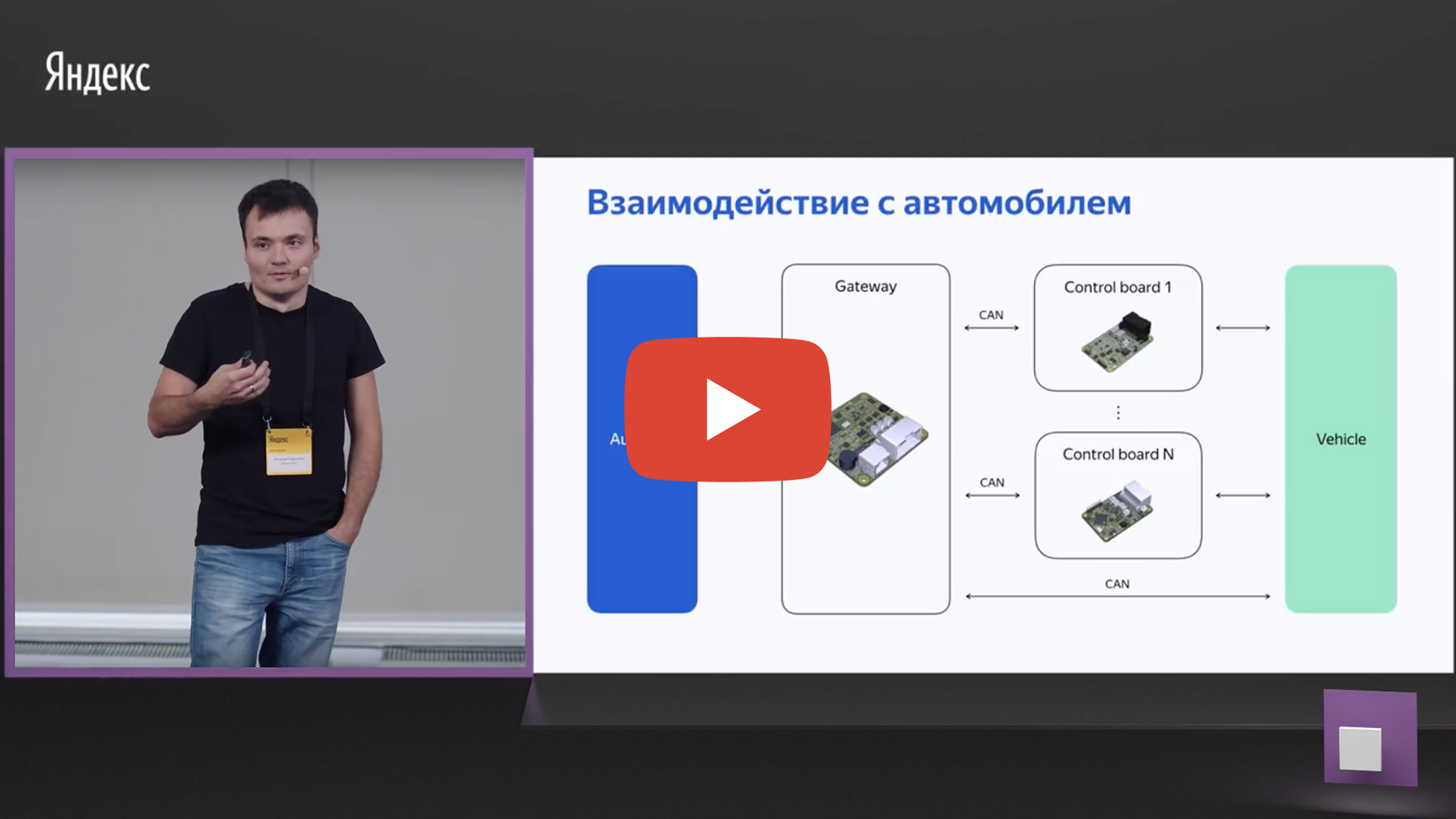
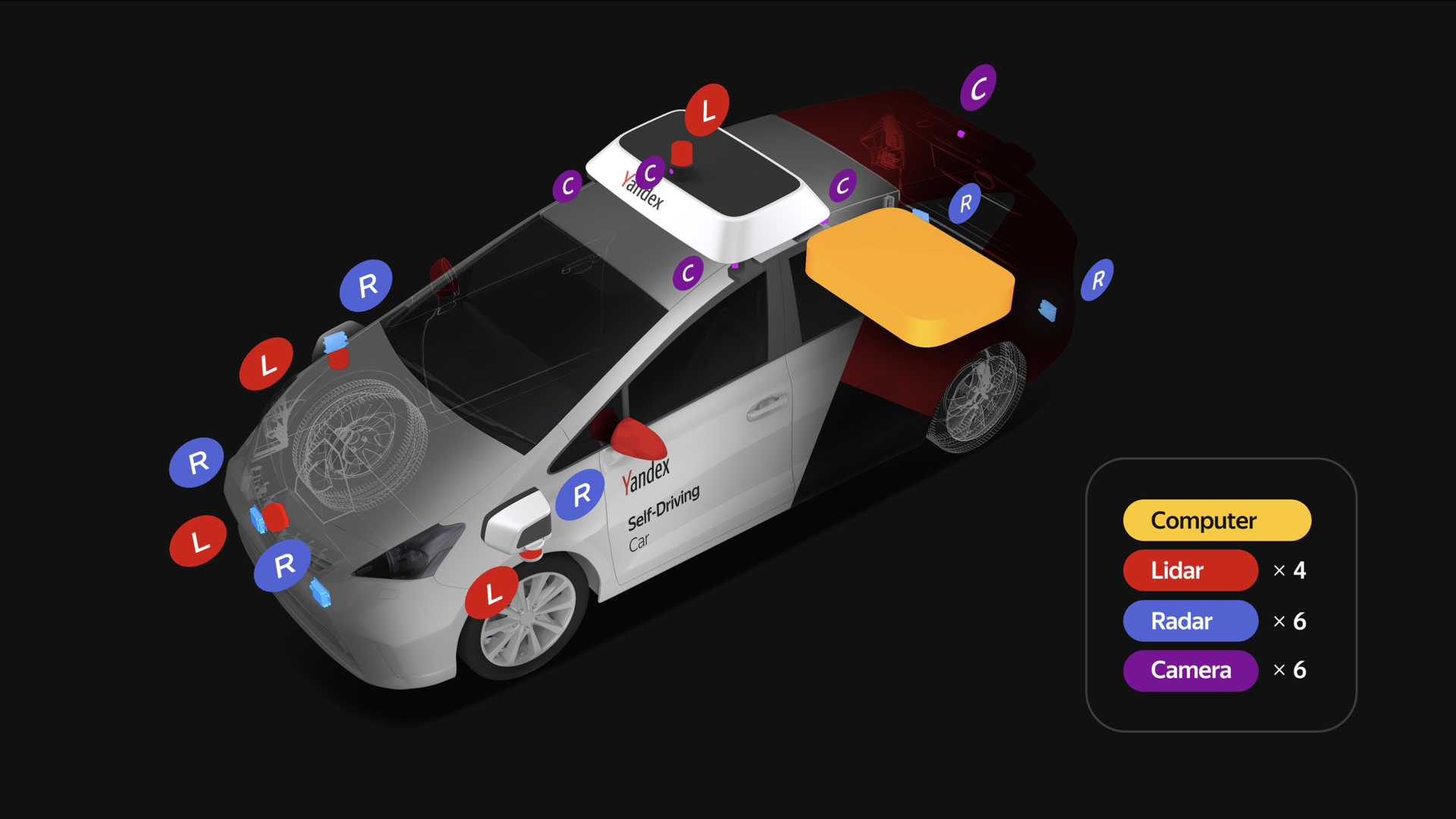
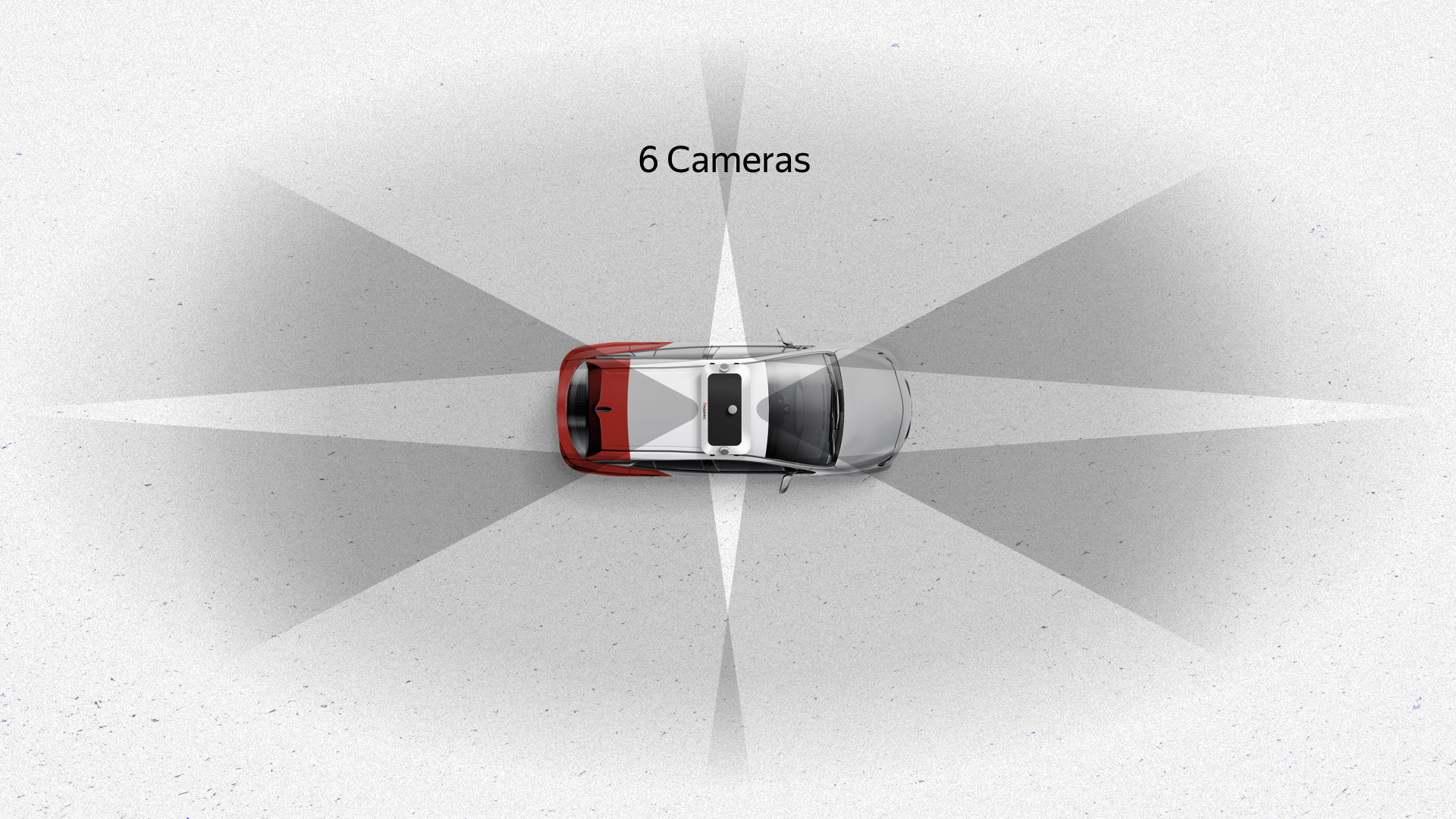
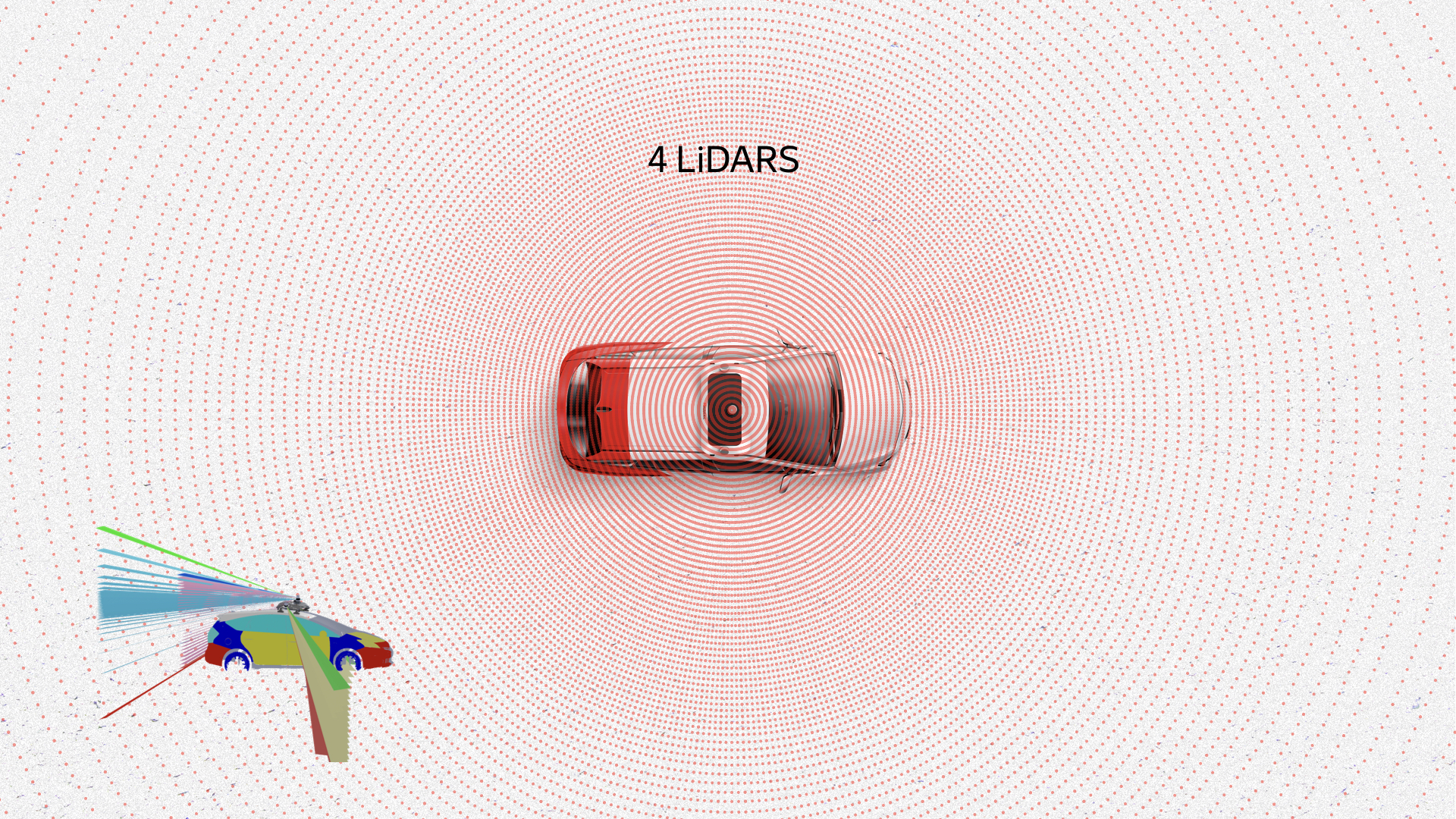
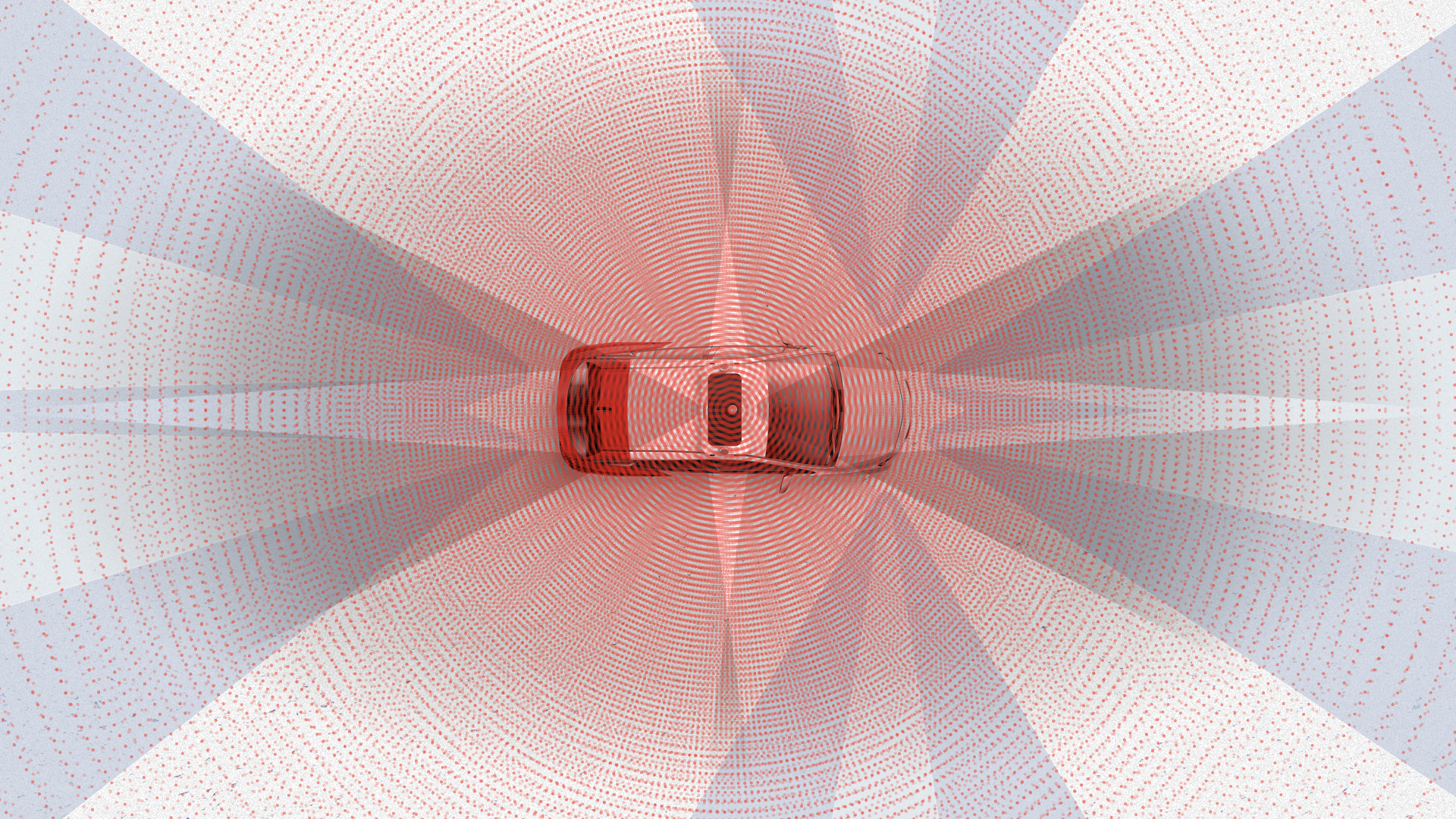
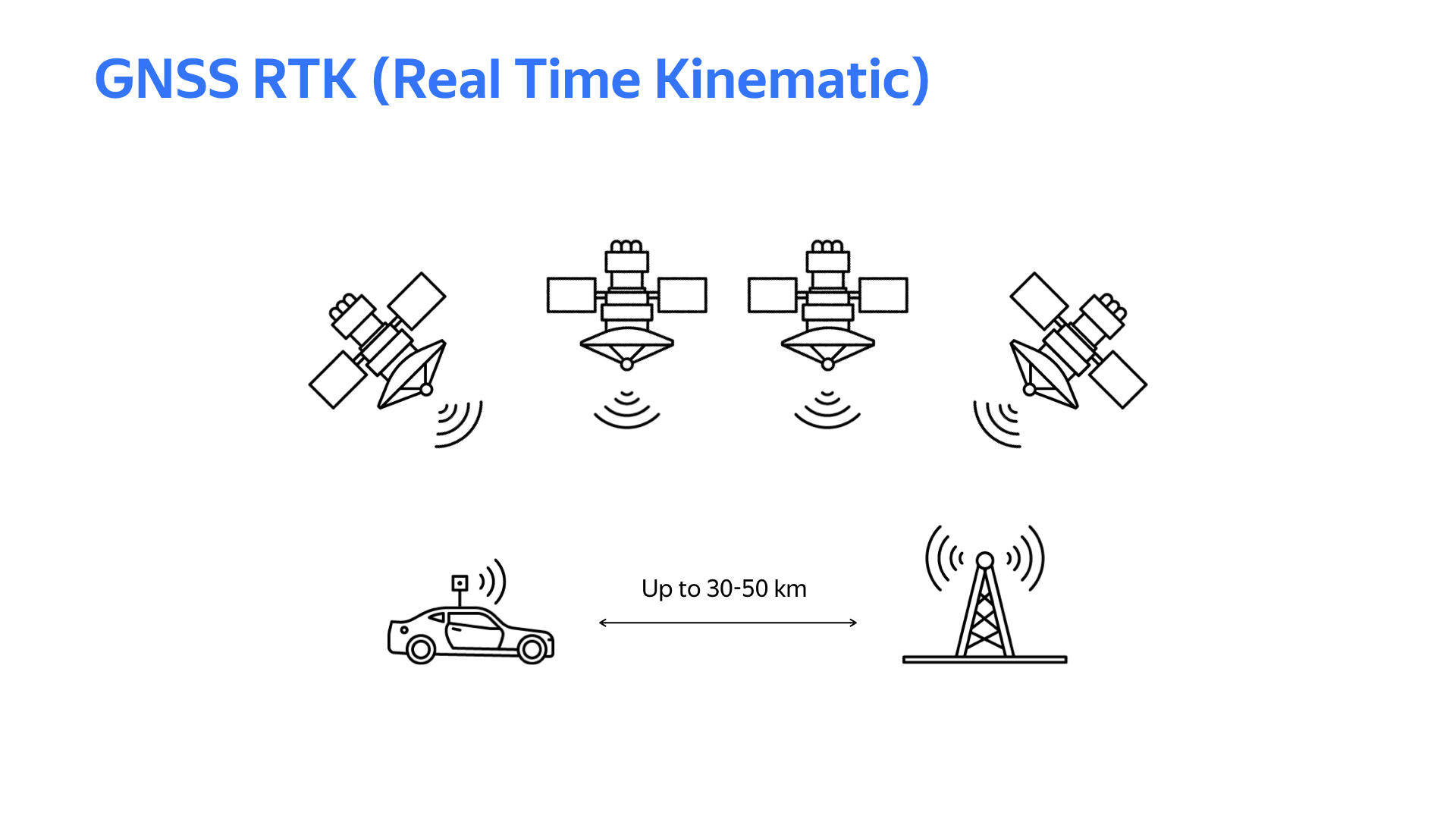
— Всем привет, меня зовут Виталий Подколзин, я руководитель разработки встраиваемых систем проекта беспилотного автомобиля. И сегодня я хотел бы с вами поговорить о том, что такое беспилотный автомобиль, какие компоненты входят в его состав, как заставить машину двигаться и как работа автопилота и его компонентов зависят от применяемых устройств.
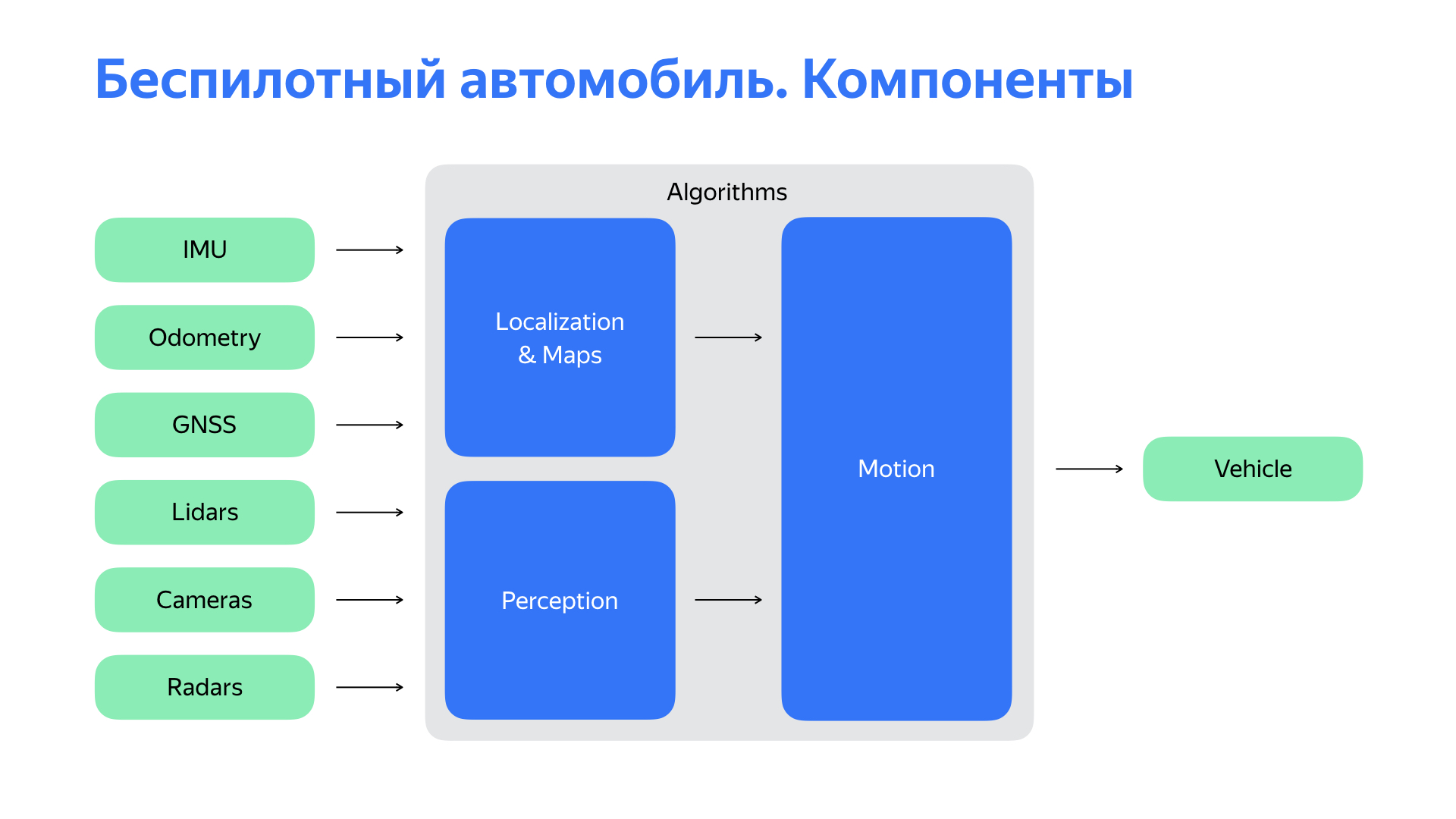
Чтобы понять, куда дальше ехать, человеку сначала надо выяснить, где он находится. Беспилотному автомобилю — тоже. За это у нас отвечает подсистема локализации. Потом нужно понять, что творится вокруг нас. За наше зрение, за восприятие мира отвечает система восприятия или perception. На основе данных о местоположении, об объектах вокруг нас, мы можем строить прогнозы по дорожной обстановке, по ее развитию, по поведению участников дорожного движения. И выбирать оптимальный маршрут движения, траектории, далее превращая это в управляющее воздействие.
Но все перечисленное — это, в общем случае, алгоритмы. И вы могли бы запустить эти алгоритмы на своем компьютере, будь он достаточно мощным. Конечно, это не сделало бы из компьютера беспилотный автомобиль. Не хватает двух важных вещей.
Беспилотный автомобиль: оживляем алгоритмы. Доклад Яндекса
Подробная расшифровка еще одного доклада со встречи Яндекс.Железо — про разработку устройств для беспилотника.
— Всем привет, меня зовут Виталий Подколзин, я руководитель разработки встраиваемых систем проекта беспилотного автомобиля. И сегодня я хотел бы с вами поговорить о том, что такое беспилотный автомобиль, какие компоненты входят в его состав, как заставить машину двигаться и как работа автопилота и его компонентов зависят от применяемых устройств.
Чтобы понять, куда дальше ехать, человеку сначала надо выяснить, где он находится. Беспилотному автомобилю — тоже. За это у нас отвечает подсистема локализации. Потом нужно понять, что творится вокруг нас. За наше зрение, за восприятие мира отвечает система восприятия или perception. На основе данных о местоположении, об объектах вокруг нас, мы можем строить прогнозы по дорожной обстановке, по ее развитию, по поведению участников дорожного движения. И выбирать оптимальный маршрут движения, траектории, далее превращая это в управляющее воздействие.
Но все перечисленное — это, в общем случае, алгоритмы. И вы могли бы запустить эти алгоритмы на своем компьютере, будь он достаточно мощным. Конечно, это не сделало бы из компьютера беспилотный автомобиль. Не хватает двух важных вещей.
Скрытый текст








Империя - это мир, и этой идеологии достаточно. Мы живём в самой лучшей стране в мире и все нам завидуют.
Одушевлённое Одевают, Неодушевлённое Надевают.
Одушевлённое Одевают, Неодушевлённое Надевают.
Карма: +0.02
Регистрация: 16.09.2019
Сообщений: 2
Читатели: 0
Регистрация: 16.09.2019
Сообщений: 2
Читатели: 0
Цитата: EugeneZ от 16.09.2019 17:48:01При наличии %%10 автомобилей-роботов мы уже все будем ездить медленно и печально.
Ну да, особенно учитывая что ездить будут строго по программе и не поймут что их пропускают. А на многих разъездах в часы пик соблюдая 100% правила просто не разъедешься.
Карма: +53.43
Регистрация: 24.07.2008
Сообщений: 4,230
Читатели: 0
Регистрация: 24.07.2008
Сообщений: 4,230
Читатели: 0


Москва
38 лет
Карма: +92.38
Регистрация: 18.02.2011
Сообщений: 13,359
Читатели: 7
Регистрация: 18.02.2011
Сообщений: 13,359
Читатели: 7
Цитата: EugeneZ от 16.09.2019 17:48:01При наличии %%10 автомобилей-роботов мы уже все будем ездить медленно и печально. И постоянные пробки из-за того, что один идиот припарковался в неположенном месте, а другой объехать его не может, ибо для этого придётся на осевую линию наехать.
Решается увеличением наказаний за неправильную парковку. Нет денег на штрафы - продай авто и заплати. Заодно подстегнет производство автопилотов, так как с ними вероятность штрафа резко снизится.
Отредактировано: Foxhound - 31 окт 2019 01:59:54
Южная Сибирь
Карма: +2.68
Регистрация: 09.02.2010
Сообщений: 612
Читатели: 0
Регистрация: 09.02.2010
Сообщений: 612
Читатели: 0
Цитата: Foxhound от 31.10.2019 01:58:09Решается увеличением наказаний за неправильную парковку. Нет денег на штрафы - продай авто и заплати. Заодно подстегнет производство автопилотов, так как с ними вероятность штрафа резко снизится.
Ну ясен пень, что когда-то в далекой галактике все отладят, отшлифуют программный код, оптимизируют законодательство, минимизируют до минимального минимума травматизм в ДТП, но в процессе поубивают кучу людей и велосипедистов, а переходную эпоху будем тащиться за тупящими роботами и торчать в пробках из-за сдутой на проезжую часть коробки, спущенного колеса у робота или неправильно припаркованной машины.
Да, и личные авто будут только у фермеров да отшельников, горожанам удобнее будет беспилотное такси.
И основная масса людей еще больше отупеет. Ибо чтоб пользоваться автомобилем, не нужно будет долго учиться, нести бремя ответственности за свою и чужую жизни, думать об эксплуатации достаточно сложной техники.
Отредактировано: EugeneZ - 31 окт 2019 09:46:45

Новосибирск
Карма: +1.08
Регистрация: 26.01.2015
Сообщений: 1,563
Читатели: 0
Регистрация: 26.01.2015
Сообщений: 1,563
Читатели: 0
Цитата: VladimirKox от 03.07.2019 20:01:25Да, уж...
Balamut!
Вас в яндексе забанили? Ну, тогда гуглите про дофамин, окситоцин. серотонин и пр. - это хорошо.
Квантовые эффекты усредняются в живой клетке, из-за многочисленного дублирования, да! гуглите ещё и про клеточный сигналинг.
на мой взгляд банальная ошибка, смотрите не туда
 я могу доказать как мне думается что квантовая составляющая работы нашего мозга существенна и без них мы бы не были теми кто мы есть , самое замечательное что каждый может это проверить во всяком случае те у кого есть мозг
я могу доказать как мне думается что квантовая составляющая работы нашего мозга существенна и без них мы бы не были теми кто мы есть , самое замечательное что каждый может это проверить во всяком случае те у кого есть мозг 
Карма: -13.77
Регистрация: 06.08.2008
Сообщений: 1,533
Читатели: 0
Регистрация: 06.08.2008
Сообщений: 1,533
Читатели: 0
Цитата: EugeneZ от 31.10.2019 09:40:23Права выдают после около 30 часов обучения. Некоторым хватает и 20 часов. Зашибись "долго учиться"!
И основная масса людей еще больше отупеет. Ибо чтоб пользоваться автомобилем, не нужно будет долго учиться,
Цитатанести бремя ответственности за свою и чужую жизни,Учитвывая количество водятлов на дорогах - несут "бремя ответственности" очень немногие.
Цитатадумать об эксплуатации достаточно сложной техники.
А, так вы шутили. Извините, сразу не понял, думал вы всерьез это пишите.
Карма: +74.16
Регистрация: 15.02.2018
Сообщений: 6,705
Читатели: 4
Регистрация: 15.02.2018
Сообщений: 6,705
Читатели: 4
Цитата: Slav Rus от 13.07.2019 11:04:57Наши по всей видимости не покупали, не зная как работает, не доверили бы такую ответственную "работу")
.
«Росэлектроника» представила корабельный комплекс связи с искусственным интеллектом
https://rostec.ru/ne…tellektom/
.
Похоже ИИ, стало чем то похоже на "нано"
Ага - только нанохайп - это чисто отечественный хайп... А ИИ-хайп - мировой хайп (вместе с зеленым хайпом Греты)... Залезь на раздел cs arxiv.org... что сразу видно за 5 лет он стал крупнейшим разделом хранилища , переплюнув бессменного лидера math... А во вторых там чуть ли не каждая 4 работа со словами deep learning, или neural networks... Да и вообще эти два слова разлезлись по всем разделам
Карма: -13.77
Регистрация: 06.08.2008
Сообщений: 1,533
Читатели: 0
Регистрация: 06.08.2008
Сообщений: 1,533
Читатели: 0
Цитата: GrinF от 09.11.2019 14:19:18Ага - только нанохайп - это чисто отечественный хайп... А ИИ-хайп - мировой хайп (вместе с зеленым хайпом Греты)... Залезь на раздел cs arxiv.org... что сразу видно за 5 лет он стал крупнейшим разделом хранилища , переплюнув бессменного лидера math... А во вторых там чуть ли не каждая 4 работа со словами deep learning, или neural networks... Да и вообще эти два слова разлезлись по всем разделам
Ну так действительно разлезлись. Утилиты по автоматизации рутинной работы по распознаванию картинок (нередко именно это скрывается под красивыми словами deep learning) действительно активно использоваться стали в науке и промышленности в последние годы. Очень даже полезная штука.
Главное не путать с научпоповским т.н. "ИИ"
Карма: -0.03
Регистрация: 10.11.2019
Сообщений: 2
Читатели: 0
Регистрация: 10.11.2019
Сообщений: 2
Читатели: 0
Искусственый Интеллект прежде всего это поисковая система, появившаяся как результат решения проблемы поставленой NIST TREC QA. А имено, как найти ответ в форме одной фразы на вопрос, в 6++ миллионах текстов, так чтобы этот ответ был осмысленным/ по смыслу. То есть, чтобы ответ был и в контексте, и подтекстах вопроса.
В ходе решения проблемы NIST TREC QA мною была выработана система и метод ИИ-разбора текста (запатентовано, см. USPTO на имя "Ilya Geller"), которые замещают единственый существовавший ранее n-gram разбор. К примеру есть предложение
-- Иван и Марфа весело смеются, она любит это.
n-gram разбор получает 2-3 фразы (паттерна, если не по Русски) из предложения. Например:
- Иван и Марфа весело смеются
- она любит это.
ИИ-разбор получает следующий набор (уже осмысленых фраз):
- и Иван весело смеётся
- и Марфа весело смеётся
- она любит смеятся
- Марфа любит смеятся
- она любит это
- Марфа любит это
- это любимо ею
- это любимо Марфой
- смех любим ею
- смех любим Марфой. Этот разбор алгоритмизируется, почитайте учебник грамматики?
Итак, ИИ-разбор даёт намного больше (и осмысленых!) фраз при разборе предложения, нежели n-gram. Это и есть основа ИИ как поисковой системы.
Структуировав подобным образом тексты человека, есть возможность создать из них его индивидуальный профиль, и затем аннотировать поисковые уже его запросы используя фразы из профиля. Тогда 1-2 слово поискового запроса становится несколькимми сотнями и тысячами слов, и поиск информации становится исключительно точным.
O Искусственого Интеллекта индексации.
Вынужден ссылатся на Великого, а имено на Лейбница: "Идею, согласно которой в мире не существует абсолютно схожих монад или двух совершенно одинаковых вещей, Лейбниц сформулировал как принцип «всеобщего различия» и в то же время как тождество «неразличимых», выдвинув тем самым глубоко диалектическую идею."
Итак, проблема - которая стояла предо мной в NIST TREC QA - была в том как найти то что нужно, если оно описывается одинаково (например, одним и тем же словом или словами). Я решил эту проблему за счёт аннотирования слова или слов фразы, описывающих нечто, по его (или их) словарными определениями. В деталях технолгия описана в моём патенте (см. USPTO на имя "Ilya Geller").
То есть имея расширеный до многих сотен и тысяч фраз поисковый запрос, ИИ сравнивает его с полноцеными текстами, описывающими нечто как наборы словарных определений, каждое из которых есть параграфы (структуированые через ИИ-разбор).
Кроме того ИИ-разбор вычленяет из текстов фразы, как правило состоящиии из 2-5 слов. И тогда сочетания 2-5 наборов словарных определений делает эти фразы совершено уникальными. К примеру, ища информацию в миллиардах текстах вы получите как результат, рискну сказать, 10-20 ответов. (В то время как Гугл вываливает на вас десятки миллионов ответов которые вы сортирует вручную, перебирая сочетания слов (для запросов) и читая тексты.)
Это - ИИ-индексация. С ней вы можете сделать самый мощный в мире суперкомпьютер из Pentium I, что недавно продемонстрировал Гугл.
Синонимичные кластеры Искусственого Интеллекта.
Сынонимичные кластеры есть замена языкам программирования. Есть предложение:
-- Иван и Марфа весело смеются, она любит это.
ИИ-разбор получает следующий набор (уже осмысленых фраз):
- и Иван весело смеётся
- и Марфа весело смеётся
- она любит смеятся
- Марфа любит смеятся
- она любит это
- Марфа любит это
- это любимо ею
- это любимо Марфой
- смех любим ею
- смех любимо Марфой.
Набор об Иване есть синонимичный кластер (одна фраза):
- и Иван весело смеётся
Набор об Марфе есть синонимичный кластер (много фраз):
- и Марфа весело смеётся
- она любит смеятся
- Марфа любит смеятся
- она любит это
- Марфа любит это
- это любимо ею
- это любимо Марфой
- смех любим ею
- смех любимо Марфой.
Программирование есть перевод заданий (спецификаций) в код, когда происходит структуирование (программистом, человеком) текста в набор комманд. ИИ делает то же самое, извлекая синонимичные кластеры и назначая определёные действия каждой фразе (петтерну по заморски).
Например автомобили Гугля руководствуются извлечёными из текстов инструкций коммандами.
В ходе решения проблемы NIST TREC QA мною была выработана система и метод ИИ-разбора текста (запатентовано, см. USPTO на имя "Ilya Geller"), которые замещают единственый существовавший ранее n-gram разбор. К примеру есть предложение
-- Иван и Марфа весело смеются, она любит это.
n-gram разбор получает 2-3 фразы (паттерна, если не по Русски) из предложения. Например:
- Иван и Марфа весело смеются
- она любит это.
ИИ-разбор получает следующий набор (уже осмысленых фраз):
- и Иван весело смеётся
- и Марфа весело смеётся
- она любит смеятся
- Марфа любит смеятся
- она любит это
- Марфа любит это
- это любимо ею
- это любимо Марфой
- смех любим ею
- смех любим Марфой. Этот разбор алгоритмизируется, почитайте учебник грамматики?
Итак, ИИ-разбор даёт намного больше (и осмысленых!) фраз при разборе предложения, нежели n-gram. Это и есть основа ИИ как поисковой системы.
Структуировав подобным образом тексты человека, есть возможность создать из них его индивидуальный профиль, и затем аннотировать поисковые уже его запросы используя фразы из профиля. Тогда 1-2 слово поискового запроса становится несколькимми сотнями и тысячами слов, и поиск информации становится исключительно точным.
O Искусственого Интеллекта индексации.
Вынужден ссылатся на Великого, а имено на Лейбница: "Идею, согласно которой в мире не существует абсолютно схожих монад или двух совершенно одинаковых вещей, Лейбниц сформулировал как принцип «всеобщего различия» и в то же время как тождество «неразличимых», выдвинув тем самым глубоко диалектическую идею."
Итак, проблема - которая стояла предо мной в NIST TREC QA - была в том как найти то что нужно, если оно описывается одинаково (например, одним и тем же словом или словами). Я решил эту проблему за счёт аннотирования слова или слов фразы, описывающих нечто, по его (или их) словарными определениями. В деталях технолгия описана в моём патенте (см. USPTO на имя "Ilya Geller").
То есть имея расширеный до многих сотен и тысяч фраз поисковый запрос, ИИ сравнивает его с полноцеными текстами, описывающими нечто как наборы словарных определений, каждое из которых есть параграфы (структуированые через ИИ-разбор).
Кроме того ИИ-разбор вычленяет из текстов фразы, как правило состоящиии из 2-5 слов. И тогда сочетания 2-5 наборов словарных определений делает эти фразы совершено уникальными. К примеру, ища информацию в миллиардах текстах вы получите как результат, рискну сказать, 10-20 ответов. (В то время как Гугл вываливает на вас десятки миллионов ответов которые вы сортирует вручную, перебирая сочетания слов (для запросов) и читая тексты.)
Это - ИИ-индексация. С ней вы можете сделать самый мощный в мире суперкомпьютер из Pentium I, что недавно продемонстрировал Гугл.
Синонимичные кластеры Искусственого Интеллекта.
Сынонимичные кластеры есть замена языкам программирования. Есть предложение:
-- Иван и Марфа весело смеются, она любит это.
ИИ-разбор получает следующий набор (уже осмысленых фраз):
- и Иван весело смеётся
- и Марфа весело смеётся
- она любит смеятся
- Марфа любит смеятся
- она любит это
- Марфа любит это
- это любимо ею
- это любимо Марфой
- смех любим ею
- смех любимо Марфой.
Набор об Иване есть синонимичный кластер (одна фраза):
- и Иван весело смеётся
Набор об Марфе есть синонимичный кластер (много фраз):
- и Марфа весело смеётся
- она любит смеятся
- Марфа любит смеятся
- она любит это
- Марфа любит это
- это любимо ею
- это любимо Марфой
- смех любим ею
- смех любимо Марфой.
Программирование есть перевод заданий (спецификаций) в код, когда происходит структуирование (программистом, человеком) текста в набор комманд. ИИ делает то же самое, извлекая синонимичные кластеры и назначая определёные действия каждой фразе (петтерну по заморски).
Например автомобили Гугля руководствуются извлечёными из текстов инструкций коммандами.
Малая Вишера
Карма: -21.94
Регистрация: 12.01.2017
Сообщений: 1,832
Читатели: 1
Регистрация: 12.01.2017
Сообщений: 1,832
Читатели: 1
Цитата: IlyaGeller от 11.11.2019 00:04:44Скрытый текст
Смех без причины - признак дурачины (с).
Ищут не слова, а смысл. Любое количество слов , при этом, будет вырвано из контекста, а значит поиск не удовлетворительным.
ПС То, что нравится Ивану да Марье никакого отношения к смеху не имеет, так как смех это следствие, а не причина.
Так , "ЭТО" , вы не найдёте никогда.
"Мне плевать на вас ублюдки.
Я анархо-аморал." (С)
Я анархо-аморал." (С)

Карма: +38.60
Регистрация: 05.06.2010
Сообщений: 19,900
Читатели: 8
Регистрация: 05.06.2010
Сообщений: 19,900
Читатели: 8
Цитата: mark.76 от 12.11.2019 08:08:37Смех без причины - признак дурачины (с).
Ищут не слова, а смысл. Любое количество слов , при этом, будет вырвано из контекста, а значит поиск не удовлетворительным.
ПС То, что нравится Ивану да Марье никакого отношения к смеху не имеет, так как смех это следствие, а не причина.
Так , "ЭТО" , вы не найдёте никогда.
Добавлю что поиск по словоформам, а не по смыслу оставляет за бортом кучу текстов выражающих тот же смысл синонимами, а также отрицанием антонимов.
PS. Боюсь что с подобным подходом к искусственному интеллекту человечество получит кучу чего-то вякающих черных ящиков, которые невозможно как-то верифицировать и соответственно им доверять, как это уже имеет место с современными поисковыми системами типа full-text-search
Отредактировано: Поверонов - 12 ноя 2019 08:48:53
Карма: +53.43
Регистрация: 24.07.2008
Сообщений: 4,230
Читатели: 0
Регистрация: 24.07.2008
Сообщений: 4,230
Читатели: 0
Цитата: Поверонов от 12.11.2019 08:44:04поиск по словоформам, а не по смыслу оставляет за бортом кучу текстов выражающих тот же смысл синонимами, а также отрицанием антонимов.
PS. Боюсь что с подобным подходом к искусственному интеллекту человечество получит кучу чего-то вякающих черных ящиков
Вообще, смысловой поиск даже наш Яндекс уже достаточно давно (2016) анонсировал: алгоритм «Палех»: как нейронные сети помогают поиску Яндекса. Используются семантические (смысловые) векторы.
Затем уже, по мнению авторов пошел в ход "космический" уровень: поисковая технология «Королёв».
Вот еще более свежая статья. Исследование Яндекса и краткая история поиска по смыслу
Отредактировано: TAU - 12 ноя 2019 22:49:29
Карма: +38.60
Регистрация: 05.06.2010
Сообщений: 19,900
Читатели: 8
Регистрация: 05.06.2010
Сообщений: 19,900
Читатели: 8
Цитата: TAU от 12.11.2019 22:47:15Вообще, смысловой поиск даже наш Яндекс уже достаточно давно (2016) анонсировал: алгоритм «Палех»: как нейронные сети помогают поиску Яндекса. Используются семантические (смысловые) векторы.\n\n
Затем уже, по мнению авторов пошел в ход "космический" уровень: поисковая технология «Королёв».\n\n
Вот еще более свежая статья. Исследование Яндекса и краткая история поиска по смыслу
Они тоже говорят об АИ.
ЦитатаТехнология семантических векторов обладает огромным потенциалом. Например, переводить в такие векторы можно не только заголовки, но и полные тексты документов — это позволит ещё точнее сопоставлять запросы и веб-страницы.
Пока что весь АИ ограничен заголовками. Но всё равно "черный ящик" - как и кто в процессе обучения устанавливал релевантность остается за кулисами. И даже если 99% релевантной информации будет опущено вы об этом никогда не узнаете.
Карма: +53.43
Регистрация: 24.07.2008
Сообщений: 4,230
Читатели: 0
Регистрация: 24.07.2008
Сообщений: 4,230
Читатели: 0
Цитата: Поверонов от 12.11.2019 23:41:051. Пока что весь АИ ограничен заголовками.
2. Но всё равно "черный ящик"
По первому пункту - "это несерьезно". ИИ (слабый, естественно!) давно и успешно применяется на практике в целом ряде областей. Включая очень даже серьезные - военную сферу и системы безопасности, да и финансовые оценки весьма дорого стоят.
По второму пункту - пытаются бороться, например, путем "вербализации".
Сейчас на ветке:
4,
Модераторов: 0,
Пользователей: 0,
Гостей: 0,
Ботов: 4