Были или нет американцы на Луне?
13,343,433
110,283

Карма: +260.02
Регистрация: 05.08.2016
Сообщений: 18,954
Читатели: 4
Регистрация: 05.08.2016
Сообщений: 18,954
Читатели: 4
Цитата: михайло потапыч от 05.09.2019 18:29:13Докажите, что это видео нельзя было снять в павильоне.
Впрочем, этот тезис ко всем фото и видео материалам программы Аполло относится

У вас правда с логикой проблемы, или придуриваетесь? Дерево можно склеить из папье-маше, но это никак не влияет на наличие натуральных деревьев.
Зверей встретили песни и громкий смех.
А звери вошли и убили всех.
*****
Шприй был прав! (с)
А звери вошли и убили всех.
*****
Шприй был прав! (с)
Карма: +260.02
Регистрация: 05.08.2016
Сообщений: 18,954
Читатели: 4
Регистрация: 05.08.2016
Сообщений: 18,954
Читатели: 4
Цитата: Протеин от 05.09.2019 11:39:25Вот всем задачка.
Найдите на американской Луне хоть один зайчик отраженного от фольги и деталей ЛМ солнца на грунте.
На китайской луне зайчиком море. У китайцев другие законы оптики?
AS11-40-5920
AS11-40-5925
AS11-40-5926
AS11-40-5947 – AS11-40-5951
AS12-46-6791
AS12-46-6792
AS14-67-9380
AS17-134-20491
Зверей встретили песни и громкий смех.
А звери вошли и убили всех.
*****
Шприй был прав! (с)
А звери вошли и убили всех.
*****
Шприй был прав! (с)
Протеин
Цитата: Время вперёд от 06.09.2019 21:03:55После вот плюса (см.картинку ниже), ДядяВася и остальные юзеры поставившие плюс, должны сдать свои дипломы . Ладно Пушков, гуманитарий, но ДядяВася, который как бы намекает, что он совсем не лирик ставит плюс за это ...
Доброе утро всем.
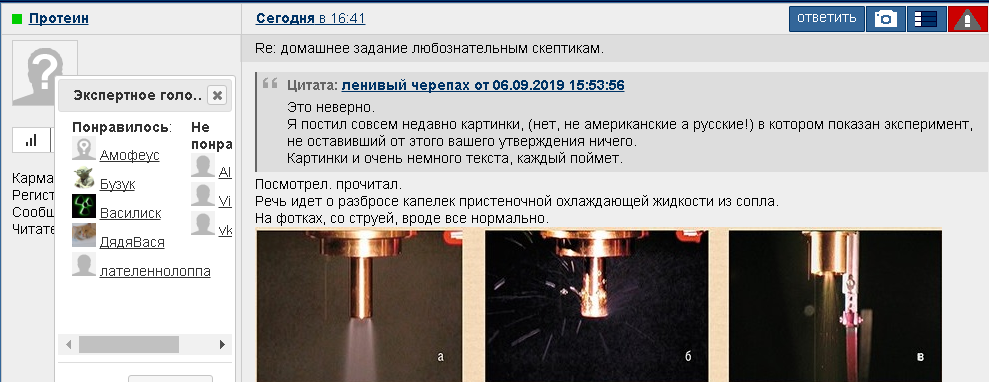
Что бы закончить эту перепалку и защитить честь мундира поддержавших меня камерадов, выкладываю идеальную картинку реактивной струи в глубоком вакууме. Эта картинка сделана с подсветкой лазером в соответствии всем требованиям.
Причем источник этой информации 100% будет акцептирован всеми участниками этой битвы.
Надеюсь, что "продвинутые" физики с юбилейной ветки скажут пару слов, так мол и так не правы были звиняйте. :о))
Камерадам кто меня поддержал, большое спасибо.

С уважением
Отредактировано: Протеин - 07 сен 2019 09:07:04
Протеин
Цитата: Vick от 07.09.2019 03:59:48AS11-40-5920
AS11-40-5925
AS11-40-5926
AS11-40-5947 – AS11-40-5951
AS12-46-6791
AS12-46-6792
AS14-67-9380
AS17-134-20491
Спасибо за проделанную работу.
Прокомментирую позже.
С уважением
Отредактировано: Протеин - 01 янв 1970
Карма: +507.56
Регистрация: 30.07.2016
Сообщений: 7,142
Читатели: 2
Регистрация: 30.07.2016
Сообщений: 7,142
Читатели: 2
Цитата: adolfus от 07.09.2019 00:05:05-- Да это любимое, управлять камерой для съемки объекта двигающегося не прямолинейно и с ускорением до первой космической для Луны, с лагом в >3 СЕКУНД это нечто.
Ни ухом ни рылом в управлении. Управление с "лагом" – это обычное дело. Упреждающее, называется. Баржу, которую буксир толкает видел? От выдачи команды в рубке до изменения курса баржи десять секунд может пройти. Тем не менее, как-то баржи передвигаются от поворота к повороту в узких речках.
Скорость у баржи какая, по отношению к времени лага? Но это все ерунда, пример не прокатывает из за принципа , да есть задержка между отданием команды и откликом на нее, но происходит все это у вас на глазах, есть визуальный контроль этих медленных изменений..
Есть примеры более так сказать приближенные к той реальности, например камеры для управления советским луноходом. Вот в сравнении с ним и надо понимать ту сложность которая стояла перед насовским оператором.
Там не просто временной лаг(задержка) а лаг таков что камера и оператор живут как бы в разных временных точках, с разницей в >1.5 сек. То есть у себя на мониторе оператор видит то что произошло 1.5 сек. назад на Луне, таже хрень и с камерой, она узнает что оператор отдал ей команду только через полторы секунды, само собой обратная связь для оператора будет более 3 сек. Для лунохода это было терпимо скорость лунохода 0,8-2 км/ч движение равномерное, и что самое главное управлялся луноход с земли, то бишь один и тот же человек управлял(отдавал ком на упр.) и контролировал луноход, а значит хоть в какой то мере мог контролировать изменения. У ровера с насавским оператором были совсем другие условия: ЛМ двигался с ускорением, за несколько сек он набрал мин.1.6 км/сек , это значит что от той точки где его видел оператор камеры ЛМ уже находился в в 2- 2.5 км, а вот в какой стороне оператор даже предвидеть не мог так как не управлял полетом ЛМ.
Если хотите сами вкурить всю сложность данного управления, можете потренироваться "на кошках" запустите любую динамичную игру на удаленке с пингом 1500ms. Это вам покажет сложности(хотя и не все) с которыми столкнулся оператор, и у него была 1 попытка, а каждый взлет ЛМ(15;16;17) это разные условия.

Карма: +588.64
Регистрация: 27.09.2008
Сообщений: 24,890
Читатели: 2
Регистрация: 27.09.2008
Сообщений: 24,890
Читатели: 2
Цитата: South от 07.09.2019 11:11:57а вот в какой стороне оператор даже предвидеть не мог так как не управлял полетом ЛМ.
Уй как интересно... Как же они в Землю-то попали при таких прогнозах траектории?
Карма: +507.56
Регистрация: 30.07.2016
Сообщений: 7,142
Читатели: 2
Регистрация: 30.07.2016
Сообщений: 7,142
Читатели: 2
Цитата: Luddit от 07.09.2019 11:27:36Уй как интересно... Как же они в Землю-то попали при таких прогнозах траектории?
Каких прогнозах? уточните что имели в виду? Я говорил о том что оператор камеры ровера, не имел возможности отслеживания траектории ЛМ никакой кроме визуальной, а визуальный отстает на 3 сек. То есть ЛМ мог за это время сменить направление согласно программе старта а учитывая скорость легко выйти из рамок кадра, после чего шансы поймать его в кадр стремятся к 0.
Карма: +588.64
Регистрация: 27.09.2008
Сообщений: 24,890
Читатели: 2
Регистрация: 27.09.2008
Сообщений: 24,890
Читатели: 2
Цитата: South от 07.09.2019 11:50:04Каких прогнозах? уточните что имели в виду? Я говорил о том что оператор камеры ровера, не имел возможности отслеживания траектории ЛМ никакой кроме визуальной, а визуальный отстает на 3 сек. То есть ЛМ мог за это время сменить направление согласно программе старта а учитывая скорость легко выйти из рамок кадра, после чего шансы поймать его в кадр стремятся к 0.
То есть типа на Земле были не в курсе, когда и по какой траектории должен полететь ЛМ?
Карма: +507.56
Регистрация: 30.07.2016
Сообщений: 7,142
Читатели: 2
Регистрация: 30.07.2016
Сообщений: 7,142
Читатели: 2
Цитата: Luddit от 07.09.2019 12:05:59То есть типа на Земле были не в курсе, когда и по какой траектории должен полететь ЛМ?
И как вы ее визуализируете для оператора камеры?
Протеин
Цитата: Luddit от 07.09.2019 12:05:59То есть типа на Земле были не в курсе, когда и по какой траектории должен полететь ЛМ?
Добрый день.
Вы согласны, что при любом исходе этого спора, можно сделать вывод, что камера не могла дергаться при съемке.
Реакция оператора не позволяла это сделать.
Что касается объекта съемки, он не мог менять траекторию по определению.
С уважением
Отредактировано: Протеин - 01 янв 1970
Карма: +1.17
Регистрация: 19.03.2019
Сообщений: 1,072
Читатели: 1
Регистрация: 19.03.2019
Сообщений: 1,072
Читатели: 1
Цитата: Протеин от 06.09.2019 19:57:18К сожалению, ВЫ, ошибаетесь. Зачем мне вас обманывать на том, что легко проверяется.
Потратил 15 минут еще раз. Смотрите отчет ниже. Там и координаты места есть на каждом скриншоте.
Ну и? Что из видимого с 10 км вы потеряли при взгляде с 14? Есть некоторые различия, связанные со взглядом под разными углами, но и только.
Протеин
Цитата: Sergey_64 от 06.09.2019 14:36:48Так зато какая энергетика! Осторожно посоветую коллеге Протеину монетизировать свои расчёты. Билл Кейзинг сделал ведь состояние на публикации своих книг. Да и ветеран Юрий Игнатьевич Мухин не бедствует.
Добрый день и Вам.
Так что там с картинкой про звуковое давление под соплом. Перевели термины? Или помочь?
Пост то они стерли, от стыда наверное? Вы хоть сами читали ПДФ, что подсунули верующие? Или им на слово поверили, что там есть хоть что то про воздействие реактивной струи на грунт под ЛМ, кроме картинок (сильно размытых).
Я, Вам, ранее задал вопрос.
1. Сообщил ли взрыв баллона с кислородом реактивный импульс тяги сборке ЛМ, СМ? (ваши корифеи реактивного движения сообщили мне ранее, что лунонавты этого не заметили и сборка не сдвинулась с траектории)
2. Если создал, то какой? Считать умеете наверное, раз других учите и критикуете. :о)
3. Реактивная тяга R-4D сообщает одинаковое воздействие (имеется ввиду перемещение с пространстве от первоначальной точки до импульса) в вакууме, в условиях отсутствия гравитации, на дайвбалон весом 15 кг и на сборку весом 44 тонны?
Жду ответы.
С уважением
Отредактировано: Протеин - 01 янв 1970
Карма: +1.17
Регистрация: 19.03.2019
Сообщений: 1,072
Читатели: 1
Регистрация: 19.03.2019
Сообщений: 1,072
Читатели: 1
Цитата: South от 07.09.2019 12:10:56И как вы ее визуализируете для оператора камеры?
Зная траекторию и позицию камеры, можно просчитать заранее необходимый угол поворота камеры в каждый момент времени. Соответственно, оператор знал, куда ее двигать.
Карма: +23.19
Регистрация: 18.12.2009
Сообщений: 2,454
Читатели: 4
Бан в разделе до 24.11.2024 01:14
Регистрация: 18.12.2009
Сообщений: 2,454
Читатели: 4
Бан в разделе до 24.11.2024 01:14
Цитата: South от 07.09.2019 12:10:56И как вы ее визуализируете для оператора камеры?
Оператор камеры, Эд Фендел, пытался снять старт LMа в каждой миссии. Получилось только в последней. Он тщательно изучил все элементы взлётной траектории. Для "визуализации" заклеил целую стенку миллиметровкой и прорисовал на ней траекторию. Рассчитал временные промежутки и позиции камеры, в которых LM должен быть в кадре. Это не просто, но и не запредельно сложно, для профессионала (Коновалов тоже смог бы). Получилось. С третьего раза.
Отредактировано: Vist - 07 сен 2019 12:51:53
Карма: +1.17
Регистрация: 19.03.2019
Сообщений: 1,072
Читатели: 1
Регистрация: 19.03.2019
Сообщений: 1,072
Читатели: 1
Цитата: Протеин от 07.09.2019 12:28:06Добрый день.
Вы согласны, что при любом исходе этого спора, можно сделать вывод, что камера не могла дергаться при съемке.
Чего это? Камера повторяет команды оператора с задержкой 1 сек, если оператор дернул резко рычагом, то дернется и камера.
Протеин
Цитата: Курилов от 06.09.2019 16:20:25Вот где на самом деле ваша гора. Обвел красным:

Сделаю разъяснение по этой картинке.
Задача, при построении таких схем визуализации, имеет два условия. Ровная площадка и желательно прямая дорога.
Эта дорога немного поворачивает, поэтому указанный объект съехал немного влево. Это Вас сбило с толку.
Но я повторю всю процедуру подробно, что бы снять все ваши сомнения.
Отчет ниже. Сделал то же самое на абсолютно прямой дороге постом для Вас выше.
Смотрите.
Позиции съемки на карте, с отметками реперных точек. красным квадратов обозначено место съемки.

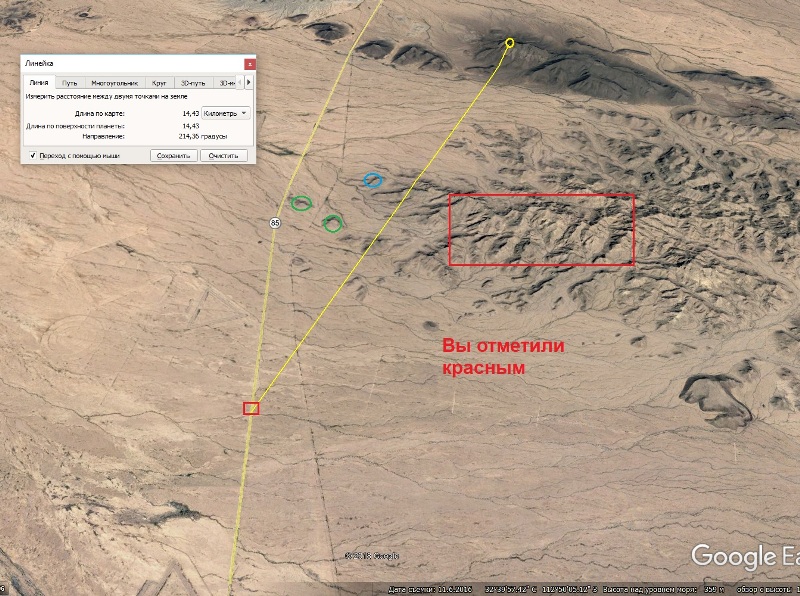
И сборка из двух фоток с обозначенный углом зрения. (необходимо учитывать небольшой разворот дороги)

С уважением
Отредактировано: Протеин - 01 янв 1970
Протеин
Цитата: Курилов от 07.09.2019 12:47:56Зная траекторию и позицию камеры, можно просчитать заранее необходимый угол поворота камеры в каждый момент времени. Соответственно, оператор знал, куда ее двигать.
Я про то, что она резко дергается. Механизм привода это исключал.
Отредактировано: Протеин - 01 янв 1970
Карма: +219.74
Регистрация: 12.02.2009
Сообщений: 6,364
Читатели: 3
Регистрация: 12.02.2009
Сообщений: 6,364
Читатели: 3
Цитата: Vist от 07.09.2019 12:49:58Оператор камеры, Эд Фендел, пытался снять старт LMа в каждой миссии. Получилось только в последней. Он тщательно изучил все элементы взлётной траектории. Для "визуализации" заклеил целую стенку миллиметровкой и прорисовал на ней траекторию. Рассчитал временные промежутки и позиции камеры, в которых LM должен быть в кадре. Это не просто, но и не запредельно сложно, для профессионала (Коновалов тоже смог бы). Получилось. С третьего раза.
Справедливости ради: в первый раз (А15) получиться и не могло, у камеры был сломан вертикальный привод, во второй (А16) не получилось потому, что ровер с камерой припарковали ближе, чем оговаривалось, и, соответственно, чем расчитывал оператор. А в остальном — совершенно ничего сложного в том, чтобы порулить камерой по нехитрому алгоритму с секундомером. Когда других косяков не было (А17) — получилось, можно сказать, с первого раза.
Отредактировано: Alexxey - 07 сен 2019 14:15:17
Карма: +507.56
Регистрация: 30.07.2016
Сообщений: 7,142
Читатели: 2
Регистрация: 30.07.2016
Сообщений: 7,142
Читатели: 2
Цитата: Курилов от 07.09.2019 12:47:56Зная траекторию и позицию камеры, можно просчитать заранее необходимый угол поворота камеры в каждый момент времени.
Для просчитать, нужно еще много чего, в том числе и скорость срабатывания сервоприводов камеры.
Протеин
Цитата: Курилов от 07.09.2019 12:50:55Чего это? Камера повторяет команды оператора с задержкой 1 сек, если оператор дернул резко рычагом, то дернется и камера.
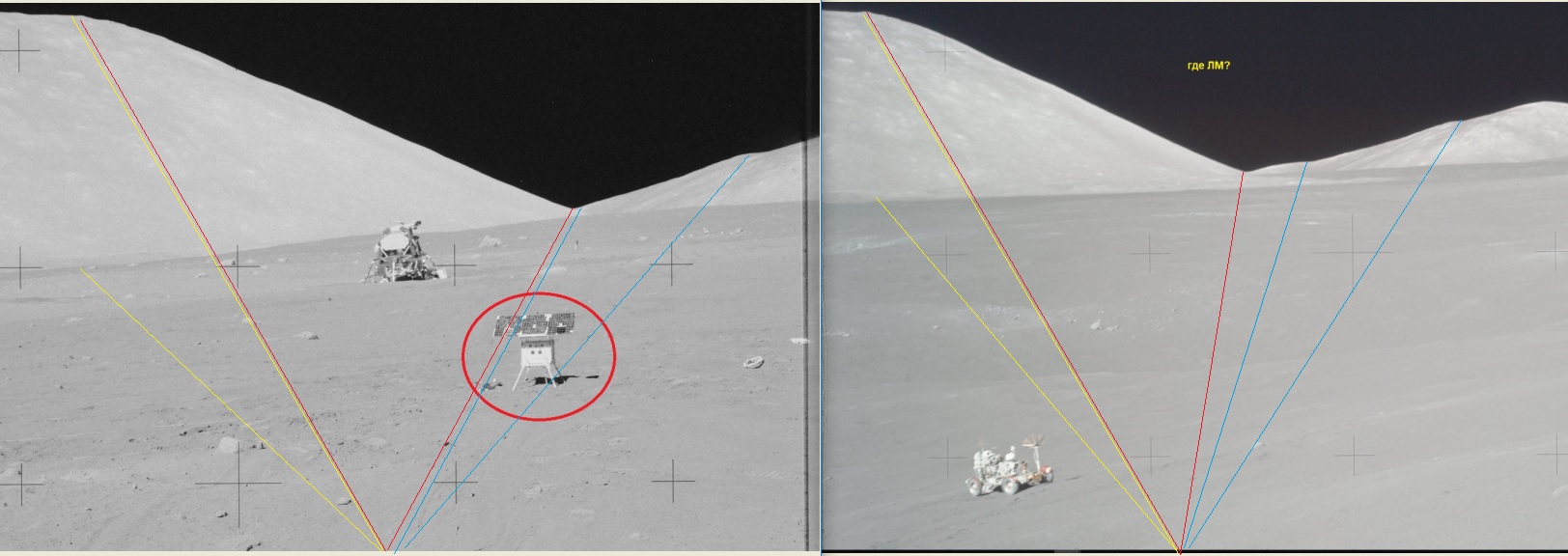
Давайте пожалуйста закончим с фотками НАСА.
Разметил по изменению угла обзора от изменения расстояния до объекта на 4 км. Можно сравнить с изменениями угла на земле.
Атмосфера может влиять на прорисовку деталей объекта, но углы должны быть одинаковыми.
Надеюсь, два реальных опыта, Вас убедили.
Вот результат.
С уважением
Отредактировано: Протеин - 07 сен 2019 13:20:55
Сейчас на ветке:
20,
Модераторов: 0,
Пользователей: 0,
Гостей: 4,
Ботов: 16