Были или нет американцы на Луне?
13,622,092
111,032
Карма: -0.68
Регистрация: 19.03.2019
Сообщений: 1,219
Читатели: 1
Регистрация: 19.03.2019
Сообщений: 1,219
Читатели: 1
Цитата: ДальнийВ от 19.04.2019 12:16:41Ну давайте прокачаем ваши предположения о скорости камеры на данном видео.Считать умеете? Если воспроизводится на 24 кадрах в секунду, значит за минуту показывают 1440 кадров. А поскольку съемка была на 1 кадре в секунду, значит на снимаемом объекте прошло 24 минуты.
На 1.27- дёрнулась камера, значит астронавт её трогал, переключая скорости.
На 2.28- мы уже наблюдаем двух астронавтов в кадре.
Сколько кадров прошло за это время?
То есть смотрим видео, ускоренное в 24 раза.
ЦитатаПоэтому, если вам так невтерпёж порассуждать о кадрах, это надо делать не на каких-то помойных отрывках а на тех, о которых НАСА заявляет как о настоящих.Это видео и заявлено как настоящее, так как опубликовано на AFJ.


58 лет
Карма: +104.97
Регистрация: 17.01.2011
Сообщений: 4,244
Читатели: 6
Регистрация: 17.01.2011
Сообщений: 4,244
Читатели: 6
Цитата: photo_vlad от 19.04.2019 12:28:45Только что журналист Лисов отказался от хорошей темы для статьи.
А почему?
А потому, что он, как и Первушин, уже тоже почуял жареное.
Нет. Потому что:
(1) У меня изначально не было сомнений в достоверности свидетельства Молотова;
(2) Это свидетельство ничего не меняет в вопросе о том, были ли американцы на Луне;
(3) У Вас нет полномочий ставить мне задачи. А кроме того, Вы трус, который трет неугодные комментарии, банит неугодных комментаторов и не умеет признавать свои ошибки.
Собственно, (3) надо было бы поставить первым.
Нынче Америка уже не та. А ведь в 1969–1972 гг. американцы шесть раз высаживались на Луну!
Карма: -0.68
Регистрация: 19.03.2019
Сообщений: 1,219
Читатели: 1
Регистрация: 19.03.2019
Сообщений: 1,219
Читатели: 1
Цитата: ДальнийВ от 19.04.2019 12:29:44Потому что астронавт его задел.
Поглядите стопроцентный НАСАвский материал, да заодно объясните нам с чего это флаг закачался, когда астронавт мимо пробежал?
.
Карма: +538.86
Регистрация: 21.10.2015
Сообщений: 5,886
Читатели: 0
Аккаунт заблокирован
Регистрация: 21.10.2015
Сообщений: 5,886
Читатели: 0
Аккаунт заблокирован
Цитата: Technik от 18.04.2019 18:04:16Только наш добрый и толерантный к обеим противоборствующим сторонам модератор не наказывает за такой злостный троллинг - это насчет тросиков.
Дальний в свое время уже повисел на этих тросиках вместе (или рядом) с этим аппаратом.
Вам захотелось немного его лавров оттяпать, милейший Потапыч?

Кадры реального полёта и "посадки" этой американской бутафории будут?
Представьте, рассмотрим.
Карма: +538.86
Регистрация: 21.10.2015
Сообщений: 5,886
Читатели: 0
Аккаунт заблокирован
Регистрация: 21.10.2015
Сообщений: 5,886
Читатели: 0
Аккаунт заблокирован
Цитата: Курилов от 19.04.2019 12:33:38Считать умеете? Если воспроизводится на 24 кадрах в секунду, значит за минуту показывают 1440 кадров. А поскольку съемка была на 1 кадре в секунду, значит на снимаемом объекте прошло 24 минуты.
То есть смотрим видео, ускоренное в 24 раза.
Это видео и заявлено как настоящее, так как опубликовано на AFJ.
Так что там случилось с флагом когда мимо него пробежал астронавт?

Материал разоблачающий лунные выходки требовали?

Требовали!
Получили?
Получили!
Отвечать будете?
Или как всегда...
Карма: +538.86
Регистрация: 21.10.2015
Сообщений: 5,886
Читатели: 0
Аккаунт заблокирован
Регистрация: 21.10.2015
Сообщений: 5,886
Читатели: 0
Аккаунт заблокирован
Цитата: Курилов от 19.04.2019 12:35:18Потому что астронавт его задел.
https://youtu.be/ymwE1sNm82Y
Задел?

Ну приведите расчёты.
Сами понимаете ваше высосанное из пальца мнение, здесь никого не интересует.
П.С.
А пока на американской луне, как видим, зарегистрировано наличие атмосферы.
58 лет
Карма: +104.97
Регистрация: 17.01.2011
Сообщений: 4,244
Читатели: 6
Регистрация: 17.01.2011
Сообщений: 4,244
Читатели: 6
Цитата: ДальнийВ от 19.04.2019 13:15:36Сами понимаете ваше высосанное из пальца мнение, здесь никого не интересует.
А пока на американской луне, как видим, зарегистрировано наличие атмосферы.
Так какая физическая величина при наличии отражателя должна быть в 10-100 раз больше, в чем она измерятся и каким образом определяется?
Нынче Америка уже не та. А ведь в 1969–1972 гг. американцы шесть раз высаживались на Луну!

Харьков-Киев
25 лет
Карма: +69.77
Регистрация: 11.03.2011
Сообщений: 475
Читатели: 0
Регистрация: 11.03.2011
Сообщений: 475
Читатели: 0
Цитата: Курилов от 19.04.2019 12:35:18Потому что астронавт его задел.
А шевеление "до" пробега как объясняется?

Карма: +126.48
Регистрация: 10.03.2019
Сообщений: 1,594
Читатели: 0
Аккаунт заблокирован
Регистрация: 10.03.2019
Сообщений: 1,594
Читатели: 0
Аккаунт заблокирован
Цитата: Курилов от 19.04.2019 12:35:18Потому что астронавт его задел.
Пробежав в полуметре от флага?
Но, собственно, он действительно его задел - потоком воздуха.
Потому, что это снималось в студии на Земле.
Отредактировано: photo_vlad - 19 апр 2019 в 13:42
Мюнхгаузен тоже бывал на Луне. Причём раньше американцев!
Карма: +126.48
Регистрация: 10.03.2019
Сообщений: 1,594
Читатели: 0
Аккаунт заблокирован
Регистрация: 10.03.2019
Сообщений: 1,594
Читатели: 0
Аккаунт заблокирован
Цитата: Liss от 19.04.2019 12:35:05Нет. Потому что:
(1) У меня изначально не было сомнений в достоверности свидетельства Молотова;
И это научный ответ?
Вот Молотов и надул лженаучного журналиста Лисова.
Да так, что он теперь боится это проверить.
Мюнхгаузен тоже бывал на Луне. Причём раньше американцев!
Харьков-Киев
25 лет
Карма: +69.77
Регистрация: 11.03.2011
Сообщений: 475
Читатели: 0
Регистрация: 11.03.2011
Сообщений: 475
Читатели: 0
Цитата: Курилов от 18.04.2019 16:18:17Приведите пример хотя бы одного "наиболее убойного аргумента", тупо обойденного молчанием.
Шо?
Опять за рыбу деньги?
Что вынудило солнце, находящееся за 150 млн. км. так "сконцентрироваться" на астронавте?


Почему правая и левая часть сцены имеют разную яркость?

Почему освещена только левая нижняя часть сцены? На остальное у солнца мочи не хватило? Даже японцы удивляются.
http://www.treeman96…aN244.html
Что обусловило спектральную неоднородность освещения сцены?
Да! И про отсвет грунта на заднике, тоже поясните плиз, а то и этот момент так и остался в умолчании.
Отредактировано: averig - 19 апр 2019 в 14:44
Карма: -0.68
Регистрация: 19.03.2019
Сообщений: 1,219
Читатели: 1
Регистрация: 19.03.2019
Сообщений: 1,219
Читатели: 1
Цитата: photo_vlad от 19.04.2019 13:39:35Пробежав в полуметре от флага?Как замерили расстояние между астронавтом и флагом? И от какой именно части тела астронавта расстояние до флага полметра?
Карма: -0.68
Регистрация: 19.03.2019
Сообщений: 1,219
Читатели: 1
Регистрация: 19.03.2019
Сообщений: 1,219
Читатели: 1
Цитата: ДальнийВ от 19.04.2019 13:15:36https://youtu.be/ymwE1sNm82YИзмеряем высоту шлема на кадре в тот момент, когда астронавт фоткается с флагом. Затем измеряем высоту шлема на кадре в тот момент, когда астронавт пробегает мимо. Шлем увеличился вдвое, значит и астронавт вдвое приблизился к камере. Вот и все расчеты.
Задел?
Ну приведите расчёты.
58 лет
Карма: +104.97
Регистрация: 17.01.2011
Сообщений: 4,244
Читатели: 6
Регистрация: 17.01.2011
Сообщений: 4,244
Читатели: 6
Цитата: photo_vlad от 19.04.2019 13:36:18Где здесь я стёр хоть одну вашу лженаучную глупость или попытку троллить?
Тут вся ваша дурь как на ладони, вы напрасно жалуетесь.
Здесь у Вас нет таких возможностей.
А в своем блоге – стирали, и неоднократно.
Сугубо научный подход
Какие сомнения, какие проверки правильности своих выводов, какое признание ошибок? Стереть, и дело с концом.
Нынче Америка уже не та. А ведь в 1969–1972 гг. американцы шесть раз высаживались на Луну!
Карма: +538.86
Регистрация: 21.10.2015
Сообщений: 5,886
Читатели: 0
Аккаунт заблокирован
Регистрация: 21.10.2015
Сообщений: 5,886
Читатели: 0
Аккаунт заблокирован
Цитата: Курилов от 19.04.2019 13:59:26Измеряем высоту шлема на кадре в тот момент, когда астронавт фоткается с флагом. Затем измеряем высоту шлема на кадре в тот момент, когда астронавт пробегает мимо. Шлем увеличился вдвое, значит и астронавт вдвое приблизился к камере. Вот и все расчеты.
То есть, по вашему получается что астронавт при пробежке, находился ровно посередине между камерой и флагом.
И так, какое расстояние между камерой и флагом?
Смелее!
П.С.
Сейчас мы узнаем и толщину этого астронавта, а заодно и размер того улейка, в который как пчёлка, потом полезет этот бедняга.
Карма: +126.48
Регистрация: 10.03.2019
Сообщений: 1,594
Читатели: 0
Аккаунт заблокирован
Регистрация: 10.03.2019
Сообщений: 1,594
Читатели: 0
Аккаунт заблокирован
Цитата: Liss от 19.04.2019 14:12:36Здесь у Вас нет таких возможностей.
А в своем блоге – стирали, и неоднократно.
Сугубо научный подход
Зато у вас здесь полно возможностей.
Но, несмотря на это, вы и здесь сливаетесь водобачковым инструментом раз за разом.
Вы верите лжецам и шарлатанам Молотову и Первушину.
У вас нет никаких сомнений, никаких проверок правильности ваших выводов, никаких признаний ваших позорнейших для научного журналиста ошибок.
У вас ваш сугубо "научный подход".
Иными словами - позорище.
Вы, лженаучный журналист Лисов, позорище для нашей отечественной науки и журналистики.
Отредактировано: photo_vlad - 19 апр 2019 в 16:57
Мюнхгаузен тоже бывал на Луне. Причём раньше американцев!

Ленинград
Карма: +225.59
Регистрация: 17.08.2015
Сообщений: 9,229
Читатели: 21
Аккаунт заблокирован
Бан в ветке до 05.09.2124 14:49
Регистрация: 17.08.2015
Сообщений: 9,229
Читатели: 21
Аккаунт заблокирован
Бан в ветке до 05.09.2124 14:49
Цитата: averig от 19.04.2019 13:53:24Скрытый текст
Что обусловило спектральную неоднородность освещения сцены?
Да! И про отсвет грунта на заднике, тоже поясните плиз, а то и этот момент так и остался в умолчании.
Не спец в фотографии, но вот по этому фото вопрос имеется: а что, спектральная неоднородность зависит только от освещения сцены, или все же еще и от различного светопоглощения/светоотражения света различными элементами сцены?
- Что-нибудь запрещенное имеете?
- Да. Собственное мнение.
"Авантюра - не место для дискуссий!"
- Да. Собственное мнение.
"Авантюра - не место для дискуссий!"
Ленинград
Карма: +225.59
Регистрация: 17.08.2015
Сообщений: 9,229
Читатели: 21
Аккаунт заблокирован
Бан в ветке до 05.09.2124 14:49
Регистрация: 17.08.2015
Сообщений: 9,229
Читатели: 21
Аккаунт заблокирован
Бан в ветке до 05.09.2124 14:49
Цитата: Vesper от 15.04.2019 05:32:18Скрытый текст

Вашу бы энергию и ваши знания да – как говорится – в мирных бы целях. А так – получилась подгонка результатов анализа под заранее сформулированный вывод – «Таким образом, наличие атмосферы в миссии Apollo 16 является экспериментальным фактом».
Я, например, в этом самом ролике вполне себе наблюдаю моменты, когда выбрасываемый колесами ровера реголит летит вполне себе по параболе. Словом, неинтересно…
Заинтересовало другое, ваше «Однако, замедлить скорость видео несложно, поэтому подобный анализ ничего не доказывает». Одно это утверждение уже выдает вас - несмотря на ваш уровень как программиста – как стандартного опроверга. Готового принять на веру любые, вплоть до самых невменяемых, утверждения, обосновывающие «аферу».
Вообще-то - доказывает, но во все времена действует не помню уж кем
 сформулированная максима – «"Не существовало, не существует и не будет существовать аргументов, способных убедить сторонников "аферы" в обратном" ©
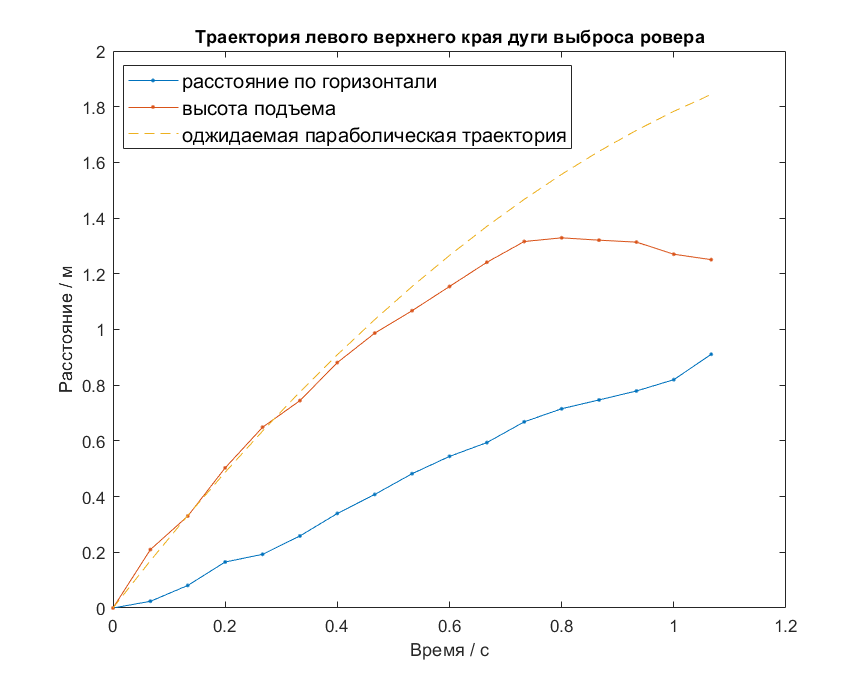
сформулированная максима – «"Не существовало, не существует и не будет существовать аргументов, способных убедить сторонников "аферы" в обратном" ©Мой расчет дал величину выброса реголита – при принятой для расчета модели! – 1, 47 метра. Что достаточно точно совпало с наблюдаемой в ходе исследуемого фрагмента ролика реальной высотой – в среднем примерно 1,6 метра.
Возник вопрос – а с какой скоростью должен ехать ровер на Земле, чтобы грунт выбрасывался на эти самые 1,47 метров?
Из ранее выведенной формулы
H = h + [ (2 π R / Т) × sin 50°]2 : 2a.
определим период вращения колеса ровера Т, при высоте Н = 1, 47 и h = 0,14 метра, для ускорения свободного падения а = g = 9,81 м/сек2 - получаем, что Т = 0,38 сек.
Что (согласно V = 2 π R/Т) дает скорость движения ровера на Земле, равную 6,7 м/сек, или 24 км/час.
Не знаю, каков у вас опыт вождения, но мой говорит о том, что при езде по показанному в ролике на дальнем плане рельефу даже с такой скоростью (а в ролике есть моменты, когда ровер едет значительно быстрее, чем в отрезке, взятом мною для определения скорости) – ровер на этих ухабах поломался бы к едрене фене, а пассажира просто выкинуло бы с сиденья, и никакие липучки ему не помогли бы.
Так что ваш труд насмарку. Меня вы не убедили, а для ваших коллег-опровергов не стоило так стараться – они и без вас твердо уверены, что никаких высадок не было.
- Что-нибудь запрещенное имеете?
- Да. Собственное мнение.
"Авантюра - не место для дискуссий!"
- Да. Собственное мнение.
"Авантюра - не место для дискуссий!"
Ленинград
Карма: +225.59
Регистрация: 17.08.2015
Сообщений: 9,229
Читатели: 21
Аккаунт заблокирован
Бан в ветке до 05.09.2124 14:49
Регистрация: 17.08.2015
Сообщений: 9,229
Читатели: 21
Аккаунт заблокирован
Бан в ветке до 05.09.2124 14:49
Цитата: ДальнийВ от 19.04.2019 12:38:56Кадры реального полёта и "посадки" этой американской бутафории будут?
Представьте, рассмотрим.
У вас склероз, или вы - по своему обыкновению - решили поклоунничать?
Вам все по Х-13 было показано, вплоть до того, что ваши "тросики", на которых он был "подвешен" - это элементы конструкции самого аппарата. Ссылки нужны? Вы у нас маленький, и все еще писаетесь по ночам и поиском по сайту не владеете?
Ваши комментарии, увы, не могут быть оценены без нарушения правил сайта, но придется на это пойти. Так вот одна бутафория здесь имеет таки место.
Это ваши мозги, милейший.
Отредактировано: Technik - 19 апр 2019 в 17:21
- Что-нибудь запрещенное имеете?
- Да. Собственное мнение.
"Авантюра - не место для дискуссий!"
- Да. Собственное мнение.
"Авантюра - не место для дискуссий!"
Харьков-Киев
25 лет
Карма: +69.77
Регистрация: 11.03.2011
Сообщений: 475
Читатели: 0
Регистрация: 11.03.2011
Сообщений: 475
Читатели: 0
Цитата: Technik от 19.04.2019 17:06:50Не спец в фотографии, но вот по этому фото вопрос имеется: а что, спектральная неоднородность зависит только от освещения сцены, или все же еще и от различного светопоглощения/светоотражения света различными элементами сцены?
Разумеется.
То есть Ваша версия заключается в том, что песочницу насыпали из разных карьеров?
Самый хороший песок положили в серединку?
Сейчас на ветке:
17,
Модераторов: 0,
Пользователей: 0,
Гостей: 6,
Ботов: 11