АВИАЦИЯ и иные...
13,519,753
34,318

|
Старый Хрыч

|
| 21 янв 2021 22:13:23 |
!
Крыса.
Дискуссия 2.137
Прошу внимания участников авиационной ветки.
Изгнанная с форума и отсутствовавшая длительное время крыса опять вернулась.
На этот раз назвалась runow и стибур
runow и стибур
Может в лс начать интересоваться, где найти Тибруса и Альтаира, может начать спрашивать о каких то вопросах у специалистов, имеющих отношение к авиастроению и конструкторским делам.
Прошу:
- не исключаю, что зарегистрируется опять
- не ведите никаких переговоров с неизвестными никами, не сообщайте ему ничего, не отвечайте на ЛС
- сразу сообщите о подобномгаденыше персонаже мне, или другому ГМ в ЛС, либо доведите в виде жалобы красной кнопкой, с пометкой "сообщить Глобальному Модератору", мы приберем его на место.
Характерные признаки - иметь может одно сообщение ( чтобы иметь возможность писать в ЛС)
Альтаира называет Альтэйром.
Дискуссия 2.137
Прошу внимания участников авиационной ветки.
Изгнанная с форума и отсутствовавшая длительное время крыса опять вернулась.
На этот раз назвалась
Может в лс начать интересоваться, где найти Тибруса и Альтаира, может начать спрашивать о каких то вопросах у специалистов, имеющих отношение к авиастроению и конструкторским делам.
Прошу:
- не исключаю, что зарегистрируется опять
- не ведите никаких переговоров с неизвестными никами, не сообщайте ему ничего, не отвечайте на ЛС
- сразу сообщите о подобном
Характерные признаки - иметь может одно сообщение ( чтобы иметь возможность писать в ЛС)
Альтаира называет Альтэйром.
Отредактировано: Старый Хрыч - 21 янв 2021 22:40:32

Москва
Карма: +33,319.00
Регистрация: 20.03.2008
Сообщений: 53,382
Читатели: 211
Глобальный Модератор
Модератор раздела
Регистрация: 20.03.2008
Сообщений: 53,382
Читатели: 211
Глобальный Модератор
Модератор раздела
Цитата: Artkonstruktor от 12.02.2017 11:46:28А он часом не БЛА планируется?
А чего?
СПБ должен быть беспилотным.
Нет, не БЛА. Потому, что это идиотизм.
"Русы суть враги целому миру" (с)Ат-Табари, Х век
"Россия - государство не торговое и не земледельческое, а военное, и призвание его - быть грозою света" (с)Император Александр II
"Россия - государство не торговое и не земледельческое, а военное, и призвание его - быть грозою света" (с)Император Александр II
Москва
Карма: +33,319.00
Регистрация: 20.03.2008
Сообщений: 53,382
Читатели: 211
Глобальный Модератор
Модератор раздела
Регистрация: 20.03.2008
Сообщений: 53,382
Читатели: 211
Глобальный Модератор
Модератор раздела
Цитата: Artkonstruktor от 13.02.2017 00:12:15А ВКС ДРЛО савсем, савсем не нужен?
А-100 как тяжелый самолет ДРЛОиУ (и А-50У), а как легкий - на базе Ил-114 сбацают, планы, вроде, были и на такой самолет, и самолет наземной РЛР, на ПП, и на РиРТР. Но когда - х.з.
"Русы суть враги целому миру" (с)Ат-Табари, Х век
"Россия - государство не торговое и не земледельческое, а военное, и призвание его - быть грозою света" (с)Император Александр II
"Россия - государство не торговое и не земледельческое, а военное, и призвание его - быть грозою света" (с)Император Александр II

Хабаровск
60 лет
Карма: +224.77
Регистрация: 04.04.2012
Сообщений: 7,215
Читатели: 5
Регистрация: 04.04.2012
Сообщений: 7,215
Читатели: 5
Цитата: donartrus от 11.02.2017 22:53:35bmpd.livejournal.
"ПАО "Объединенная авиастроительная корпорация" (ОАК) 10 февраля 2017 года сообщила, что ею заключен контракт с АО «Авиационный комплекс им. С.В. Ильюшина»на проведение опытно-конструкторских работ по созданию модернизированного пассажирского самолета Ил-96-400М....
АУ на усмотрение модераторов.
Ничего, что существует отдельная ветка для обсуждения гражданской техники? Кстати, там эта новость появилась на два дня раньше..


Луганск/Томск
Карма: +1,933.90
Регистрация: 20.06.2008
Сообщений: 13,325
Читатели: 8
Регистрация: 20.06.2008
Сообщений: 13,325
Читатели: 8
Цитата: skralex1 от 12.02.2017 20:55:03Не получится взять какой попало "крепкий" корпус, "грибок" для большого самолёта проблема, портит аэродинамику, а у меньшего это проблема вдвойне, смотрим на АВАКС и Хокай, большой на основе серийного, а флотский специальной, не серийной постройки. Аэродинамическая балансировка мелкого куда сложнее.
Хокай был сделан на основе серийного С-2 Грейхаунд. Как и противолодочный S-2 Викинг. Доработали, ясен пень, дык, и Боинга под тарелочку подтачивали...
Когда не знаешь, что делать, -
делай шаг вперед..
делай шаг вперед..
61 год
Карма: +233.44
Регистрация: 05.07.2014
Сообщений: 2,999
Читатели: 1
Регистрация: 05.07.2014
Сообщений: 2,999
Читатели: 1
Цитата: сапёрный танк от 12.02.2017 23:58:01Пока более чем десять, я думаю, не нужно, Пока у нас одна полётная палуба.
А зачем он нужен ? В смысле специально проектировать (перепроектировать в 3D) На базе вертолёта КА Не фен шуй?
На базе 114 и 112 планируют разные модификации Патрульные, разведчики в том числе и "МИНИ" ДРЛО А ещё есть мнение что на базе "Альтаира" проще запилить БЕЗ пилотный палубный ДРЛО Было бы желание
А запилить НОВЫЙ самолёт с 0 для изготовления 10 машин Да как 2 пальца об асфальт Лет 5-7 на 3D 10- 20 ярдов на создания лётного и статического и лет через 10 получим вожделенное узко заточенное ... Ну а гули нам?! ^^
Москва
Карма: +441.05
Регистрация: 31.12.2015
Сообщений: 2,022
Читатели: 12
Регистрация: 31.12.2015
Сообщений: 2,022
Читатели: 12

Опубликовано изображение и данные нового российского легкого истребителя ЛМФС
Французский журнал "Air&Cosmos" опубликовал проекции перпективного легкого многофункционального фронтового самолета (ЛМФС), разработку которого ведет РСК "МиГ". В сопроводительном описании сообщается, что разработка самолета ведется за счет собственных средств КБ, причем самолет в будущем должен прийти на замену истребителям МиГ-29 и МиГ-35.
http://bmpd.livejournal.com/2430909.html
61 год
Карма: +233.44
Регистрация: 05.07.2014
Сообщений: 2,999
Читатели: 1
Регистрация: 05.07.2014
Сообщений: 2,999
Читатели: 1
Цитата: BlindingBangs от 13.02.2017 11:32:06
Опубликовано изображение и данные нового российского легкого истребителя ЛМФС
Французский журнал "Air&Cosmos" опубликовал проекции перпективного легкого многофункционального фронтового самолета (ЛМФС), разработку которого ведет РСК "МиГ". В сопроводительном описании сообщается, что разработка самолета ведется за счет собственных средств КБ, причем самолет в будущем должен прийти на замену истребителям МиГ-29 и МиГ-35.
http://bmpd.livejournal.com/2430909.html
Ну бред же! Они свой рафаль пытаются в своём представлении натянуть на МИГ ....

63 года
Карма: +13,464.09
Регистрация: 21.02.2009
Сообщений: 21,188
Читатели: 47
Регистрация: 21.02.2009
Сообщений: 21,188
Читатели: 47
Цитата: Rocket от 13.02.2017 10:41:25А зачем он нужен ? В смысле специально проектировать (перепроектировать в 3D) На базе вертолёта КА Не фен шуй?
На базе 114 и 112 планируют разные модификации Патрульные, разведчики в том числе и "МИНИ" ДРЛО А ещё есть мнение что на базе "Альтаира" проще запилить БЕЗ пилотный палубный ДРЛО Было бы желание
А запилить НОВЫЙ самолёт с 0 для изготовления 10 машин Да как 2 пальца об асфальт Лет 5-7 на 3D 10- 20 ярдов на создания лётного и статического и лет через 10 получим вожделенное узко заточенное ... Ну а гули нам?! ^^
Нет не проще. Потому как ДРЛОиУ. А "У" - это управление. Там сидит ОБУ, а не просто оператор РЛС. Лини связи того БПЛА могут убиваться, плюс радиогоризонт. А вертушка, да, не фен шуй, а палиатив. Как пишут причастные, работать как ДРЛОиУ на Ка-31 - тот ещё цирк. Именно цирк.
Мёртвый враг всегда хорошо пахнет

Карма: +1,704.11
Регистрация: 12.02.2014
Сообщений: 4,877
Читатели: 20
Регистрация: 12.02.2014
Сообщений: 4,877
Читатели: 20
Цитата: Rocket от 13.02.2017 11:36:06Дальность полёта?
E-2D Advanced Hawkeye дальность действия 320 км - 3-4 часа патрулирования на скорости 500+ км/ч Максимальное время полёта до 6 ч 20 мин
Ка 31 дальность действия Те же 300 км А максимальная дальность 680 км Только нах это ни кому не надо А главное всегда находится в радиусе действия своих ПВО которые прикроют
Не поминайте всуе это летающее "недоРЛО" (Ка-31). Понятно, что "на безрыбье и сам раком станешь", но это "родео на перфораторе над морем" - лучше не надо. Пожалейте корабельных вертолетчиков, их и так немного.
P.S. "...и не читайте советских газет" (почти цы). Озвученные открытые данные характеристик комплекса Ка-31, скажем так, "несколько" не соответствуют реальным.

.
61 год
Карма: +233.44
Регистрация: 05.07.2014
Сообщений: 2,999
Читатели: 1
Регистрация: 05.07.2014
Сообщений: 2,999
Читатели: 1
Цитата: сапёрный танк от 13.02.2017 13:40:20Нет не проще. Потому как ДРЛОиУ. А "У" - это управление. Там сидит ОБУ, а не просто оператор РЛС. Лини связи того БПЛА могут убиваться, плюс радиогоризонт. А вертушка, да, не фен шуй, а палиатив. Как пишут причастные, работать как ДРЛОиУ на Ка-31 - тот ещё цирк. Именно цирк.
Зачем он нужен? Хакой хотим КА 31 г..но - Решили Теперь ОСНОВНОЙ Вопрос Зачем? 10 лет на создание того, что устареет через пару лет ещё на стадии проектирования и создания первых изделий
Есть загоризонтные станции вдоль границ Есть ДРЛО Большие А 50 - 100 и что то там будет на ИЛах
Зачем? Расскажите кто в теме, как и для чего их применяют и на каких театрах БД он потенциально НУЖЕН и будет востребован в перспективе с учётом заделов на будующие
Карма: +1,704.11
Регистрация: 12.02.2014
Сообщений: 4,877
Читатели: 20
Регистрация: 12.02.2014
Сообщений: 4,877
Читатели: 20
Цитата: mse от 13.02.2017 14:30:02Он может дозаправиться в воздухе. Вы об этом в курсе? К нему прилетит Ф-18 с тремя ПТБ и накачает на пару часов. Потом, ещо, если надо. Кто заправит Ка-31?
Концепции разные... Где-то я уже это слышал. Да. Там ещо про тазик было...
А вот когда допилят, тогда и рассказывайте нам про "сутки непрерывного дежурства". Пока что имеем, максимум, 3 часа, над кораблём-носителем. А они имеют, каг минимум, лётную смену, на угрожающем направлении.

Не могет "Hawkeye" дозаправляться пока. E-2D "Advanced Hawkeye" сделали с

У "глазастого" нормальный режим патрулирования: 3-4 часа в зоне на удалении 300-350 км от ордера на высотах 5500-7900м (в зависимости от задачи). Поэтому их на борту минимум два держат, чтобы смену обеспечить.
.
Карма: +1,704.11
Регистрация: 12.02.2014
Сообщений: 4,877
Читатели: 20
Регистрация: 12.02.2014
Сообщений: 4,877
Читатели: 20
Во Франции ушёл из жизни последний лётчик "Нормандии-Неман"

Французский портал Ouest-France, ссылаясь на организацию помощи и поддержки ветеранов легендарного авиаполка «Нормандия-Неман», сообщает о том, что скончался последний лётчик авиационного соединения. Речь идёт о Гаэле Табюре, который воевал на стороне союзных войск против гитлеровской Германии в 1944-1945 годах. Гаэлю Табюре было 97 лет.Известно о том, что Табюре записался добровольцем во французский полк «Нормандия» в начале 1944-го, прошёл необходимое обучение. Свой первый боевой вылет он осуществил в июне того же года. Первый блин не вышел комом. Лётчик сбил немецкий самолёт Focke-Wulf 190. В общей сложности на советско-германском фронте Гаэль Табюрое уничтожил шесть немецких самолётов.В своих интервью, которые Гаэль Табюре давал достаточно часто (преимущественно в более молодые годы), он неоднократно с восхищением высказывался о советских лётчиках, с которыми ему приходилось встречаться и обсуждать выполнение боевых задач.
Известно о том, что из состава авиаполка «Нормандия-Неман» на сегодняшний день остался один человек. Это авиамеханик Андре Пейрони, проживающий во французском городе Лион. Ему 96 лет.
В 2014 году скончался другой лётчик авиаполка "Нормандия-Неман" Жан Соваж - кавалер Ордена Отечественной войны I степени и имевший помимо французских наград советскую медаль "За победу над Германией". Жан Соваж и Гаэль Табюре оставались последними лётчиками легендарного авиаполка.
Источник
Французский портал Ouest-France, ссылаясь на организацию помощи и поддержки ветеранов легендарного авиаполка «Нормандия-Неман», сообщает о том, что скончался последний лётчик авиационного соединения. Речь идёт о Гаэле Табюре, который воевал на стороне союзных войск против гитлеровской Германии в 1944-1945 годах. Гаэлю Табюре было 97 лет.Известно о том, что Табюре записался добровольцем во французский полк «Нормандия» в начале 1944-го, прошёл необходимое обучение. Свой первый боевой вылет он осуществил в июне того же года. Первый блин не вышел комом. Лётчик сбил немецкий самолёт Focke-Wulf 190. В общей сложности на советско-германском фронте Гаэль Табюрое уничтожил шесть немецких самолётов.В своих интервью, которые Гаэль Табюре давал достаточно часто (преимущественно в более молодые годы), он неоднократно с восхищением высказывался о советских лётчиках, с которыми ему приходилось встречаться и обсуждать выполнение боевых задач.
Известно о том, что из состава авиаполка «Нормандия-Неман» на сегодняшний день остался один человек. Это авиамеханик Андре Пейрони, проживающий во французском городе Лион. Ему 96 лет.
В 2014 году скончался другой лётчик авиаполка "Нормандия-Неман" Жан Соваж - кавалер Ордена Отечественной войны I степени и имевший помимо французских наград советскую медаль "За победу над Германией". Жан Соваж и Гаэль Табюре оставались последними лётчиками легендарного авиаполка.
Источник
Отредактировано: Йохан Палыч - 13 фев 2017 21:11:32
.
63 года
Карма: +13,464.09
Регистрация: 21.02.2009
Сообщений: 21,188
Читатели: 47
Регистрация: 21.02.2009
Сообщений: 21,188
Читатели: 47
Цитата: Rocket от 13.02.2017 14:54:56Да и без кузи всё не сходя с места освещает кто и где на чём и куда Вы карту посмотрите где чего наши по втыкали и их радиус действия ... А главное есть откуда с земли поднять и А 50 и прочие разведчики
Не зачёт Натянуто на глобус - не считается
То-то за Ливанскими горами ни разу не увидели подлетающих к Сирии евреев. И ЗГРЛС вроде есть. Но она, внезапно, не работает в интересах какого-то полка или какой-то дивизии. Потребители её информации много выше уровнем.
Мёртвый враг всегда хорошо пахнет
63 года
Карма: +13,464.09
Регистрация: 21.02.2009
Сообщений: 21,188
Читатели: 47
Регистрация: 21.02.2009
Сообщений: 21,188
Читатели: 47
Цитата: Rocket от 13.02.2017 21:59:30Ну подлётное время малое, понятно Не сразу получается работать в реальном времени, есть к чему стремится И не всё там однозначно, может всё и фиксировали взлёт и прочее, только сбивать должны были Сирийцы или "не должны" Ну а может так карта легла?!
Ещё раз, потребители информации ЗГРЛС - Верховное командование, Генштаб. В интересах дивизии (а АВ - это авиадивизия) работать никогда не будет.
Мёртвый враг всегда хорошо пахнет
Карма: +1,704.11
Регистрация: 12.02.2014
Сообщений: 4,877
Читатели: 20
Регистрация: 12.02.2014
Сообщений: 4,877
Читатели: 20
Цитата: Rocket от 13.02.2017 21:59:30Ну подлётное время малое, понятно Не сразу получается работать в реальном времени, есть к чему стремится И не всё там однозначно, может всё и фиксировали взлёт и прочее, только сбивать должны были Сирийцы или "не должны" Ну а может так карта легла?!
Не плодите сущностей сверх меры. ЗГРЛС не предназначены для ПВО и никогда таких функций не выполняли.
Для обеспечения непрерывного РЛ контроля в полосе БД необходим СДРЛО, поскольку Земля - "кривая" и радиогоризонт подвинуть нельзя.
Исходя из концепции построения ПВО в СССР и РФ (как преемника) самолеты ДРЛО у нас в обязательном порядке (пока) "обременены" функциями управления, наведения и ретрансляции. Ка-31 - "огрызок", наведение с него не производится, только обнаружение, опознавание и выдача координат цели. На перспективном авианосце вряд ли будет какой-то "большой" СДРЛО - нет в нем смысла. С АУГ USNavy лоб в лоб никто бодаться не будет, это "страшилки" прошлого века.
Авианосец в нашем ВМФ - инструмент проекции силы, показатель принадлежности к Империи, фетиш, если грубо. Боевая ценность корабля такого класса - относительно невысока (для нашего флота), но без него, как-то "несолидно".
В отношение сирийцев повторю затертую фразу: "Нельзя быть большим сирийцем, чем сами сирийцы". Нас еврейские терки с арабами сегодня не особо волнуют, поэтому и такая спокойная реакция ВПР на все эти "удары" и "ответки". Пусть сами разбираются: кто кому и чего там должен. Угроз нашей группировке сегодня нет, РЛ контроля в зоне БД нам - достаточно, ПВО районов дислокации - обеспечено, поэтому там и не дежурят А-50 в режиме 24/7. Была бы острая необходимость, давно прилетели и дежурили бы.
.
Kanaris
Правительство начало предметные обсуждения выпуска Ил-96-400М. Сумма покупки первых шести самолетов может обойтись государству более чем в 40 млрд руб. С инициативой использовать Ил-96-400М выступал Дмитрий Рогозин
Планы «глубокой модернизации» пассажирской версии самолета Ил-96-400М уже разработаны Минпромторгом, Минобороны и Объединенной авиастроительной корпорацией (ОАК), сообщает газета «Коммерсантъ» со ссылкой на источники, близкие к ситуации.
Подробнее на РБК:
http://www.rbc.ru/rb…?from=main
Планы «глубокой модернизации» пассажирской версии самолета Ил-96-400М уже разработаны Минпромторгом, Минобороны и Объединенной авиастроительной корпорацией (ОАК), сообщает газета «Коммерсантъ» со ссылкой на источники, близкие к ситуации.
Подробнее на РБК:
http://www.rbc.ru/rb…?from=main
Отредактировано: Kanaris - 01 янв 1970
Alex_lee
Цитата: Внимательный от 06.02.2017 19:09:07В настоящее время ОАО «НПО «Молния» по тематике НИР «Молот» разрабатывает многорежимный гиперзвуковой беспилотный летательный аппарат.
Этот БПЛА рассматривается как прототип–демонстратор технологий гиперзвукового беспилотного самолета-разгонщика с комбинированной экранной турбо-прямоточной силовой установкой. Ключевой технологией прототипа является применение прямоточного воздушно- реактивного двигателя (ПВРД) с дозвуковой камерой сгорания и экранным воздухозаборным устройством.
Расчетно-экспериментальные параметры прототипа-демонстратора:
-крейсерские числа Маха М = 1.8… 4
-высоты полета от малых до Н = 20 000 м,
-полетная масса до 530 кг.
-наземный старт с пусковой установки, с помощью твердотопливного ускорителя.
[spoiler=Скрытый текст]
Предысторией данной НИР был проект многорежимного сверхзвукового беспилотного летательного аппарата (МСБЛА) разработки ОАО «НПО «Молния», в котором определялся аэродинамический облик перспективного беспилотного или пилотируемого самолета-разгонщика. Ключевой технологией МСБЛА является применение прямоточного воздушно-реактивного двигателя (ПВРД) с дозвуковой камерой сгорания и экранным воздухозаборным устройством. Проектные параметры МСБЛА: крейсерские числа Маха М = 1.8… 4, высоты полета от малых до Н ≈ 20 000 м, стартовый вес до 1000 кг.
Исследованная на стенде СВС-2 ЦАГИ компоновка воздухозаборника показала малую эффективность примененного подфюзеляжного клинового экрана, выполненного «заодно» фюзеляжем (рис. А) и прямоугольного экрана с размахом, равным ширине фюзеляжа (рис. Б).
Оба они обеспечили примерное постоянство коэффициентов восстановления полного давления ν и расхода f по углу атаки вместо их увеличения.
Поскольку для МСБЛА, как прототипа самолета-разгонщика, не подходил лобовой экран типа использованного на ракете Х-90, было решено на основании экспериментальных исследований ЦАГИ начала 80-х годов разработать подфюзеляжный экран, сохранив в качестве воздухозаборника конфигурацию с двухступенчатым центральным телом, полученную по результатам испытаний.
В ходе двух этапов экспериментальных исследований на специальном стенде СВС-2 ЦАГИ, декабрь 2008 – февраль 2009 г. и март 2010 г., с промежуточным этапом численных поисковых исследований было разработано экранное воздухозаборное устройство (ЭВЗУ) с двухступенчатым конусным телом, имеющим различные расчетные числа Маха по ступеням, что позволило получить приемлемые тяги в широком диапазоне чисел Маха.
Эффект экрана состоит в увеличении коэффициентов расхода и восстановления при повышении угла атаки на числах Маха М >2.5. Величина положительного градиента обоих характеристик увеличивается с повышением числа Маха.
ЭВЗУ впервые разработан и применен на гиперзвуковом экспериментальном летательном аппарате Х-90 разработки НПО «Радуга» (крылатая ракета, по классификации НАТО AS-19 Koala)
В результате была разработана аэродинамическая конфигурация прототипа по названной авторами «гибридной» схеме с интеграцией ЭВЗУ в несущую систему.
Гибридная схема имеет признаки как схемы «утка» (по количеству и расположению несущих поверхностей), так и схемы «бесхвостка» (по типу органов продольного управления). Типовая траектория МСБЛА включает запуск с пусковой наземной установки, разгон твердотопливным ускорителем до сверхзвуковой скорости запуска ПВРД, полет по заданной программе с горизонтальным участком и торможение до малой дозвуковой скорости с мягкой посадкой на парашюте.
Видно, что гибридная компоновка за счет большего экранного эффекта и оптимизации аэродинамической компоновки под минимум лобового сопротивления при α = 1.2°… 1.4° реализует существенно более высокие максимальные числа Маха полета М ≈ 4.3 в широком диапазоне высот Н = 11… 21 км. Схемы «утка» и «бесхвостка» достигают максимального значения числа М = 3.72… 3.74 на высоте Н = 11 км. При этом гибридная схема имеет малый выигрыш за счет сдвига минимума сопротивления и при малых числах Маха, имея на высоте Н ≈ 11 км диапазон полетных чисел М = 1.6… 4.25. Наименьшая область равновесного полета реализуется у схемы «утка».
В таблице приведены расчетные летно-технические данные по разработанным компоновкам по типовым траекториям полета.
Дальности полета, имеющие одинаковый уровень у всех вариантов МСБЛА, показали возможность успешного создания самолета-разгонщика при несколько увеличенном относительном запасе керосинового топлива с дальностями сверхзвукового полета порядка 1500–2000 км для возврата на аэродром базирования. При этом разработанная гибридная компоновка, являющаяся следствием глубокой интеграции аэродинамической схемы и экранного воздухозаборного устройства прямоточного воздушно-реактивного двигателя, обладала явным преимуществом по предельным скоростям полета и диапазону высот, в котором реализуется предельные скорости. Абсолютные значения числа Маха и высоты полета, достигающие Мmax = 4.3 при Нmax Mmax = 20 500 м, позволяют говорить о реализуемости на уровне существующих в России технологий многоразовой авиационно-космической системы с гиперзвуковым высотным самолетом-разгонщиком, обеспечивающим снижение массы и, соответственно, стоимости космической одноразовой ступени в 6–8 раз по сравнению со стартом с земли.
Данная аэродинамическая компоновка явилась окончательным вариантом для рассмотрения многоразового многорежимного беспилотного летательного аппарата больших сверхзвуковых скоростей полета.
Концепция и общая компоновка
Отличительным требованием к самолету-разгонщику, по сравнению с его малогабаритным прототипом, является взлет/посадка по самолетному с существующих аэродромов и необходимость совершения полета при числах Маха, меньших Маха запуска ПВРД М < 1.8… 2. Это определяет тип и состав комбинированной силовой установки самолета-разгонщика, имеющей в своем составе ПВРД и турбореактивные двигатели с форсажной камерой (ТРДФ).
На основании этого был сформирован технический облик и общая компоновка самолета-разгонщика для транспортной космической системы легкого класса с проектной грузоподъемностью порядка 1000 кг на низкую околоземную орбиту 200 км. Была проведена оценка весовых параметров жидкостной двухступенчатой орбитальной ступени на основе кислородно-керосинового двигателя РД-0124 методом характеристической скорости с интегральными потерями, исходя из условий запуска с разгонщика.
На первой ступени устанавливается двигатель РД-0124 (пустотная тяга 30 000 кг, удельный импульс 359 с), но с уменьшенным диаметром рамы и сближенными камерами, или двигатель РД-0124М (отличается от базового одной камерой и новым соплом большего диаметра); на второй ступени двигатель с одной камерой от РД-0124 (принята пустотная тяга 7 500 кг). По полученной весовой сводке орбитальной ступени с общим весом 18 508 кг была разработана ее конфигурация, а на ее основании — компоновка гиперзвукового самолета-разгонщика на взлетный вес 74 000 кг с комбинированной силовой установкой (КСУ).
КСУ включает в себя:
ПВРД с аналогичным прототипу ЭВЗУ, типом и компоновкой камеры сгорания;
Многорежимный гиперзвуковой беспилотный летательный аппарат «Молот»
Три турбореактивных двухконтурных форсажных двигателя АЛ-31Ф М1
ТРДФ и ПВРД расположены вертикальным пакетом, что позволяет монтировать и обслуживать каждый из них раздельно. Для размещения ПВРД с ЭВЗУ максимального размера и, соответственно, тяги, была использована вся длина аппарата. Максимальный взлетный вес аппарата 74 т. Масса пустого — 31 т.
На разрезе видно орбитальную ступень — двухступенчатую жидкостную РН весом 18,5 т, выводящую ПН 1000 кг на низкую околоземную орбиту 200 км. Также видны 3 ТРДДФ АЛ-31ФМ1.
Экспериментальную отработку ПВРД такого размера предполагается проводить непосредственно в летных испытаниях, используя для разгона ТРДФ. При разработке единой воздухозаборной системы были приняты базовые принципы:
Минимум подвижных частей при минимальных силовых нагрузках на них;
Полное сохранение теоретической геометрии ВЗУ ПВРД прототипа.
Реализованные путем разделения воздуховодов для ТРДФ и ПВРД за сверхзвуковой частью воздухозаборника и разработки простого по исполнению устройства-трансформера, преобразующего «туда-обратно» сверхзвуковую часть ЭВЗУ в нерегулируемые конфигурации, одновременно переключая подачу воздуха между каналами. ЭВЗУ аппарата на взлете работает на ТРДДФ, при наборе скорости М=2,0 происходит переключение на ПВРД.
За устройством-трансформером ЭВЗУ расположены горизонтальным пакетом отсек полезной нагрузки и основные топливные баки. Применение вкладных баков необходимо для тепловой развязки «горячей» конструкции фюзеляжа и «холодных» теплоизолированных баков с керосином. За отсеком полезного груза размещается отсек ТРДФ, который имеет проточные каналы для охлаждения сопел двигателей, конструкции отсека и верхней створки сопла ПВРД при работе ТРДФ.
Принцип работы трансформера ЭВЗУ самолета-разгонщика исключает с точностью до малой величины силовое противодействие на подвижную часть устройства со стороны набегающего потока. Это позволяет минимизировать относительную массу воздухозаборной системы за счет снижения массы самого устройства и его привода по сравнению с традиционными регулируемыми прямоугольными воздухозаборниками. ПВРД имеет расщепляющееся сопло-стекатель, которое в сомкнутом виде при работе ТРДФ обеспечивает безотрывный сток обтекающего фюзеляж потока. При раскрытии сопла-стекателя на переходе в режим работы ПВРД верхняя створка закрывает донный срез отсека ТРДД. Сопло ПВРД в раскрытом виде представляет собой сверхзвуковой конфузор и при некоторой степени недорасширения струи ПВРД, реализующейся на больших числах Маха, обеспечивает прирост тяги за счет продольной проекции сил давления на верхней створке.
По сравнению с прототипом существенно увеличена относительная площадь консолей крыла из-за необходимости самолетных взлета/посадки. Механизация крыла включает только элевоны. Кили оборудованы рулями направления, которые могут использоваться как тормозные щитки на посадке. Для обеспечения безотрывности обтекания при дозвуковых скоростях полета экран имеет отклоняемый носок. Шасси самолета-разгонщика четырехстоечное с размещением по бортам для исключения попадания грязи и посторонних предметов в воздухозаборник. Такая схема отработана на изделии ЭПОС – аналоге орбитального самолета система «Спираль», что позволяет, аналогично велосипедному шасси, осуществлять «приседание» на взлете.
Для определения полетных весов, положения центра масс и собственных моментов инерции самолета-разгонщика была разработана упрощенная твердотельная модель в CAD-среде.
Конструкция, силовая установка и снаряжение самолета-разгонщика были разделены на 28 элементов, каждый из которых оценивался по статистическому параметру (удельный вес приведенной обшивки и т.п.) и моделировался геометрически подобным твердотельным элементом. Для конструкции фюзеляжа и несущих поверхностей использовалась весовая статистика по самолетам типа МиГ-25/МиГ-31. Масса двигателя АЛ-31Ф М1 взята «по факту». Различный процент заливки керосина моделировался усеченными твердотельными «слепками» внутренних полостей топливных баков.
Также была разработана упрощенная твердотельная модель орбитальной ступени Массы элементов конструкции принимались на основе данных по блоку «И» (третья ступень ракеты-носителя «Союз-2» и перспективной ракеты-носителя «Ангара») с выделением постоянной и переменной составляющих в зависимости от массы топлива.
Некоторые особенности полученных результатов аэродинамики разработанного летательного аппарата:
На самолете-разгонщике для увеличения дальности полета используется режим планирования при конфигурировании под ПВРД, но без подачи топлива в него. На этом режиме используется сопло-стекатель, которое уменьшает свой раствор при выключении ПВРД до площади протока, обеспечивающего течение в канале ЭВЗУ, такое, что тяга дозвукового диффузора канала становится равна сопротивлению сопла:
Pдиф ЭВЗУ = Хсс ПВРД. Проще говоря, используется принцип работы дросселирующего устройства на установках для испытаний ВЗУ типа СВС-2 ЦАГИ. Подсобранное сопло-стекатель открывает донный срез отсека ТРДФ, который начинает создавать собственное донное сопротивление, но меньшее, чем сопротивление выключенного ПВРД со сверхзвуковым течением в канале ВЗУ. В испытаниях ЭВЗУ на установке СВС-2 ЦАГИ была показана устойчивая работа воздухозаборника с числа Маха М = 1.3, поэтому можно утверждать о выполнении режима планирования с применением сопла-стекателя как дросселя ЭВЗУ в диапазоне 1.3 ≤ М ≤ Мmax.
Летные характеристики и типовая траектория полета
Задачей самолета-разгонщика является запуск орбитальной ступени с борта в полете, при высоте, скорости полета и угле траектории, отвечающих условию максимума массы полезного груза на опорной орбите. На предварительном этапе исследований по проекту «Молот» ставится задача выхода данного летательного аппарата на максимальную высоту и скорость полета при использовании маневра «горка» для создания больших положительных значений угла траектории на ее восходящей ветви. При этом ставится условие минимизации скоростного напора при отделении ступени для соответствующего уменьшения массы обтекателя и снижения нагрузок на отсек полезного груза в раскрытом положении.
Исходными данными по работе двигателей служили летные тягово-экономические характеристики АЛ-31Ф, скорректированные по стендовым данным двигателя АЛ-31Ф М1, а также пересчитанные пропорционально камере сгорания и углу установки экрана характеристики ПВРД прототипа.
На рис. показаны области горизонтального установившегося полета гиперзвукового самолета-разгонщика в различных режимах работы комбинированной силовой установки.
Многорежимный гиперзвуковой беспилотный летательный аппарат «Молот»
Каждая зона рассчитана для средней по соответствующему участку разгонщика проекта «Молот» для средних масс по участкам траектории полетной массы аппарата. Видно, что самолет-разгонщик достигает максимального числа Маха полета М = 4.21, при полете на турбореактивных двигателях число Маха ограничено значением М = 2.23. Важно отметить, что график иллюстрирует необходимость обеспечения для самолета-разгонщика потребных тяг ПВРД в широком диапазоне чисел Маха, что было достигнуто и определено экспериментально в ходе работ над экранным воздухозаборным устройством прототипа. Взлет осуществляется при скорости отрыва V = 360 м/с — несущие свойства крыла и экрана достаточны без применения взлетно-посадочной механизации и зависания элевонов. После оптимального набора высоты на горизонтальном участке Н = 10 700 м происходит выход самолета-разгонщика на сверхзвук с дозвукового числа Маха М = 0.9, переключение комбинированной силовой установки при М = 2 и предварительный разгон до Vopt при М = 2.46. В процессе набора высоты на ПВРД самолет-разгонщик выполняет разворот на аэродром базирования и достигает высоты Н0пик = 20 000 м при числе Маха М = 3.73.
На данной высоте начинается динамический маневр по достижению максимальной высоты полета и угла траектории для запуска орбитальной ступени. Выполняется пологое пикирование с разгоном до М = 3.9 и последующим маневром «горка». ПВРД оканчивает работу на высоте Н ≈ 25000 м и последующий набор высоты происходит за счет кинетической энергии разгонщика. Запуск орбитальной ступени происходит на восходящей ветви траектории на высоте Нпуск = 44 049 м при числе Маха М = 2.05 и угле траектории θ = 45°. Самолет-разгонщик достигает на «горке» высоты Нmax = 55 871 м. На нисходящей ветви траектории, по достижению числа Маха М = 1.3, происходит переключение ПВРД → ТРДФ для исключения помпажа воздухозаборника ПВРД.
В конфигурировании ТРДФ самолет-разгонщик планирует до выхода на глиссаду, имея запас топлива на борту Gгзт = 1000 кг.
В штатном режиме весь полет от момента выключения ПВРД до посадки происходит без использования двигателей с запасом по дальности планирования.
Изменение угловых параметров движения ступени показано на данном рисунке.
При выведении на круговую орбиту Н = 200 км на высоте Н = 114 878 м при скорости V = 3 291 м/с отделяется ускоритель первой субступени. Масса второй субступени с грузом на орбите Н = 200 км составляет 1504 кг, из них полезный груз составляет mпг = 767 кг.
Схема применения и траектория полета гиперзвукового самолета-разгонщика проекта «Молот» имеет аналогию с американским «университетским» проектом RASCAL, создающимся при поддержке правительственного ведомства DARPA.
Особенностью проектов «Молот» и RASCAL является применение динамического маневра типа «горка» с пассивным выходом на большие высоты пуска орбитальной ступени Нпуск ≈ 50 000 м при малых скоростных напорах, для «Молота» qпуск = 24 кг/м2. Высотность пуска позволяет уменьшить гравитационные потери и время полета дорогостоящей одноразовой орбитальной ступени, то есть ее полную массу. Малые скоростные напоры пуска дают возможность свести к минимуму массу обтекателя полезного груза или вообще от него отказаться в отдельных случаях, что существенно для систем сверхлегкого класса (mпгН200






















Обратная стреловидность еще на "Беркуте" показала себя неподходящей для сверхзвукового режима, не говоря уже ни о каком гиперзвуке.
Гиперзвук начинается с 5 чисел маха, здесь резюмируется о крейсерской скорости в пределах 1.8-4,8 чисел.
О каком гиперзвуке может идти речь ?
 Очередные фантазии НПО Молния ?
Очередные фантазии НПО Молния ?
Отредактировано: Alex_lee - 01 янв 1970
Луганск/Томск
Карма: +1,933.90
Регистрация: 20.06.2008
Сообщений: 13,325
Читатели: 8
Регистрация: 20.06.2008
Сообщений: 13,325
Читатели: 8
Цитата: DMAN от 14.02.2017 07:37:22Давайте немного по дискутируем. 90-е годы, тяжелое время для вооруженных сил
вообще и ВВС в частности. Не исключено, что основной целью данных НИР было
обоснование необходимости сохранения стратегической авиации в составе ядерной
триады. Это было абсолютно правильно для того времени. Но давайте перенесемся
мысленно например в 1986 год и попробуем предположить, какие результаты бы
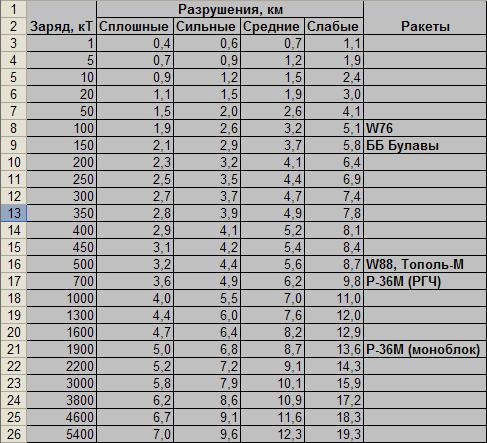
дали НИР того года. СКР Томагавк имеет БЧ W-80 с энерговыделением 170 кт. КВО
системы управления состоящей из ИНС и системы TERCOM составляет 80 метров.
Ну пусть амеры нам наврали и вместо 80 метров мы возьмем для расчета отклонение
в 200 метров. Как я понимаю радиус поражения самолетов составит порядка 4 км.Скрытый текст
Подрыв четырех СБЧ мощностью 170 кт врятли выведет 40% техники из строя,
а скорее более 90%. Посмотрим, что по этому поводу думали амеры. Для
примера у меня есть ББ W-76 с меньшим энерговыделением в 100 кт. Так,
что сравнение вполне корректное. На поражение аэродромов стратегической
авиации, например Энгельс или Украинка, они выделяли три ББ.Скрытый текст
На счет начала работ в зоне ядерного взрыва через два часа тоже есть обоснованные сомнения.
Термоядерная БЧ, точнее ее вторичный узел, является источником высокоэнергетических
нейтронов. При подрыве СБЧ на высоте пролета в 100 метров произойдет активация грунта,
материала рулежек и ВПП и прочего. Уровни будут зашкаливать за 20 000 рентген.
Работы там можно будет начинать не через два часа, а хорошо бы через две недели.
Смотря какие работы, но при мощности до полумегатонны что-то по-быстрому можно начинать делать через 8 часов после взрыва. Даже вблизи эпицентра.
Когда не знаешь, что делать, -
делай шаг вперед..
делай шаг вперед..
Alex_lee
ВМС США разрабатывают средства радиоэлектронной борьбы следующего поколения (NGJ — Next Generation Jammer), которые позволят подавить высокотехнологичные ПВО России и Китая, пишет журнал National Interest. Разрабатываемые системы позволят американским ударным самолетам уничтожать вражеские цели без риска быть замеченными зенитно-ракетными системами.
Согласно заявлению, размещенному на сайте Raytheon, NGJ "будет удовлетворять текущим потребностям миссии ВМС США, обеспечивая при этом экономически эффективную архитектуру открытых систем для будущих обновлений".
"Вся идея заключается в том, чтобы не дать системам ПВО противника заметить источник атаки — вне зависимости от типа самолета, который мы защищаем. Наша цель состоит в том, чтобы подавить ПВО противника и обеспечить реализацию миссии. Речь идет не только о том, чтобы позволить самолету выжить, но и обеспечить выполнение задачи — сбросить боеприпасы и вернуться домой", — объяснил командир радиоэлектронной разведки ВМС США Эрнст Уилсон в интервью изданию.
"Глушитель" следующего поколения, о котором говорится в статье, будет установлен на палубный самолёт радиоэлектронной борьбы ВМС США EA-18G Growler — по два "подавителя" на каждую машину. Они придут на замену ныне действующим системам AN/ALQ-99.
Как и у любых средств РЭБ, задача AN/ALQ-99 — прикрытие ударных авиационных групп путем создания ответных и шумовых радиопомех радиолокационным станциям (РЛС) обнаружения и наведения зенитных управляемых ракет (ЗУР), а также бортовыми РЛС истребительной авиации ПВО противника. Ответные помехи создают на экранах РЛС перемещающиеся отметки, которые затрудняют выделение реальных целей. Шумовые помехи оказывают маскирующее действие на полезные сигналы и могут применяться для подавления радиоэлектронных средств различного назначения, поясняет ресурс Dogswar.
Главная проблема AN/ALQ-99, однако, заключается в том, что аппарат был разработан 40 лет назад и поэтому недостаточно эффективен против современных цифровых угроз, которую представляют собой радары с активной фазированной решеткой. Новые NGJ смогут успешно противостоять им за счет того, что будут работать на нескольких частотах одновременно и иметь активную антенну с электронным сканированием луча. NGJ проектируется с ориентиром на "открытую архитектуру", предполагающую возможность интеграции новых технологий по мере развития угроз.
Несмотря на то, что РЭБ-системы изначально являются чисто оборонительными технологиями, NGJ будет конфигурироваться в том числе и с наступательными функциями для поддержки ударных самолетов, таких как F/A-18, F-35 и B-2. Разработчики задались целью сконструировать такой прибор, который полностью исключил бы возможность для противника захватывать в цель авиацию США.
"Наша задача — позволить самолету блокировать сигналы с вражеского радара", — пояснил Уинстон.
NGJ может оказаться особенно полезным, когда речь идет о защите истребителей и стелс-платформ вроде бомбардировщика B-2 и многоцелевого стелс-истребителя F-35. Технология предназначена для создания помех, блоков и "слепых зон" радиолокационным системам противника, таким как наземные ПВО. Благодаря этому штурмовик сможет войти в целевое воздушное пространство, плотно защищенное ПВО, отбомбиться и благополучно выбраться оттуда.
В современном мире NGJ жизненно важен, поскольку сама по себе стелс-технология больше не является гарантией против существующих и перспективных технологий противовоздушной обороны. Современные средства ПВО — С-300 и С-400 — все больше увеличивают дистанцию захвата стелс-самолетов и делают это на все более широком диапазоне частот. Перспективные ПВО будут функционировать на базе более мощных процессорах и использовать цифровые, а также сетевые технологии, однако Уинстон уверяет, что NGJ сможет противостоять им.
"Это постоянная игра "кошки-мышки" между ПВО и ударным самолетом. Мы разрабатываем стелс-технологии — они развивают контратакующие технологии. В ответ мы повышаем наши блокирующие РЭБ-возможности".
Не вдаваясь в подробности о том, какие именно наступательные возможности будет иметь NGJ, Уинстон заверил, что этот прибор сможет заглушать сигналы на любых радиочастотах — как в приемниках, так и передатчиках.
Ранее ВМС США заключили с Raytheon Company контракт на $1 млрд для разработки NGJ — передовой наступательной электронной технологии, которая сочетает в себе мощные и гибкие методы глушения с ультрасовременной твердотельной электроникой, говорится в заявлении компании. ВМС планируют закупить у нее 135 комплектов систем NGJ для Growler. В то же время Уинстон не исключил, что в будущем такие системы будут поставляться вместе с готовыми воздушными судами.
"Это станет важной вехой в развитии РЭБ, — заявлял Рик Юси, президент авиационных и космических систем Raytheon. — NGJ является аппаратом, который станет передовой технологией электронной атаки, причем такой, которая может быть легко адаптирована к изменяющимся условиям угроз. Высокий уровень системы обеспечит наших бойцов технологическим преимуществом, необходимым для успешного выполнения миссии и благополучного возвращения домой".
Согласно заявлению, размещенному на сайте Raytheon, NGJ "будет удовлетворять текущим потребностям миссии ВМС США, обеспечивая при этом экономически эффективную архитектуру открытых систем для будущих обновлений".
Отредактировано: Alex_lee - 14 фев 2017 13:40:39
Alex_lee
Высокопоставленный офицер ВВС Израиля выразил восхищение "революционным" оперативным потенциалом нового истребителя пятого поколения — американским F-35, точнее, тем, во что он превратится в виде модернизированной израильской версии F-35I "Адир". В то же время он предупредил, что самолетам четвертого поколения продолжают угрожать новейшие российские системы ПВО. Об этом сообщает оборонное издание США Defense News.
Выступая во вторник на ежегодной конференции, организованной Институтом Израиля по изучению национальной безопасности (INSS), командующий израильских ВВС генерал-майор Амир Эшель упомянул проблему российских систем С-400, которые Москва развернула в Сирии. Данное оружие представляет "критическую угрозу" для израильских военных машин в регионе, считает офицер.
"Очевидно, что мы будем сталкиваться с угрозами, с которыми ранее никогда не имели дело — как в воздухе, так и на земле", — комментировал он ситуацию с С-400 и другими проблемами, исходящими от региональных держав и негосударственных субъектов.
По его словам, ему не приходится беспокоиться по поводу критики, раздающейся в адрес программы F-35 и, в частности, ее дороговизны.
"Слышна критика с разных сторон: это не работает, то не работает… Но тот, у кого есть смартфон, знает, что программное обеспечение все время развивается. Это умный самолет, поэтому всегда будут появляться различные обновления и версии. Важно то, что он будет знать, как действовать в таких местах, где ничто иное не сможет действовать столь же эффективно в отношении всего спектра угроз и оперативных сценариев", — заявил он.
В свою очередь выступавший на той же конференции генерал ВВС США в отставке Гэри Норт, занимающий сейчас должность вице-президента в Lockheed Martin, тоже затронул угрозы, создаваемые российскими С-400 в Сирии, и указал на преимущества эксплуатации F-35 в условиях высокой угрозы.
"Сочетание скрытности и сенсорной интеграции — со спутниками и другими самолетами — дает отдельным летчикам возможность делиться получаемой информацией с другими пилотами, доводя эту информацию в том числе до командных пунктов на земле", — сказал американский военный.
Между тем, по данным аналитика Newsader в Израиле, пожелавшего остаться неназванным, полная оперативная готовность F-35 будет достигнута к 2018 году — именно в этом время самолет заступит на полноценную службу. В то же время он указал, что собственно модернизированный израильский вариант будет введен в действие не ранее 2022 года. Он подчеркнул, что в этом вопросе израильские производители будут зависеть от Америки.
Понятно что противостояние С-400 и Ф-35 возможно лишь гипотетически. Но вероятность что победа в такой схватке будет за Ф-35 весьма велика (процентов 80) за счет реализации новейших технологический решений.
Выступая во вторник на ежегодной конференции, организованной Институтом Израиля по изучению национальной безопасности (INSS), командующий израильских ВВС генерал-майор Амир Эшель упомянул проблему российских систем С-400, которые Москва развернула в Сирии. Данное оружие представляет "критическую угрозу" для израильских военных машин в регионе, считает офицер.
"Очевидно, что мы будем сталкиваться с угрозами, с которыми ранее никогда не имели дело — как в воздухе, так и на земле", — комментировал он ситуацию с С-400 и другими проблемами, исходящими от региональных держав и негосударственных субъектов.
"Все эти угрозы в состоянии подорвать часть усилий ВВС Израиля. Не буду заниматься самообманом: хотя мы готовимся сделать так, чтобы свести эти угрозы к абсолютному минимуму, все же некоторые наши попытки будут сорваны. Это понятно. Часть наших самолетов будет сбито. Это понятно. Это неизбежно на войне. Однако эти угрозы никогда не смогут остановить нас", — подчеркнул Эшель.
Что касается новейших стелс-бомбардировщиков F-35, первая первая пара которых была передана израильским ВВС в январе, то о них Эшель отозвался как о факторе, который поможет израильской оборонной промышленности перестроить производство линеек F-15I и F-16I — основной ударной воздушной силы — на уровень следующего поколения самолетов и тем самым сохранить воздушное превосходство на десятилетия вперед. Общее количество заказанных Израилем самолётов данного типа составило 50 единиц.
"Это больше, чем просто самолет, — заявил командующий. — Это то, что трансформирует всю систему в гораздо более эффективную и гораздо более смертоносную силу", — выражал убеждение генерал, добавив, что Израиль планирует адаптировать всю структуру ВВС к требованиям и возможностям F-35.
"Мы узнаем, как сделать так, чтобы все наши силы соответствовали пятому поколению", — объяснил эксперт.
По его словам, ему не приходится беспокоиться по поводу критики, раздающейся в адрес программы F-35 и, в частности, ее дороговизны.
"Слышна критика с разных сторон: это не работает, то не работает… Но тот, у кого есть смартфон, знает, что программное обеспечение все время развивается. Это умный самолет, поэтому всегда будут появляться различные обновления и версии. Важно то, что он будет знать, как действовать в таких местах, где ничто иное не сможет действовать столь же эффективно в отношении всего спектра угроз и оперативных сценариев", — заявил он.
По словам Эшеля, F-35 сочетает в себе гибкость, скорость, ловкость и живучесть.
"Это революция. Гораздо лучше, чем все, что у есть нас, и все, что летает в этом регионе", — указал генерал.
По словам командующего, израильская воздушная мощь должна быть готова исполнять разные задачи — от нейтрализации террористических угроз внутри страны до более продвинутых угроз, исходящих от соседних государств — вплоть до бомбардировок и разведопераций на территориях, находящихся "за тысячи километров" от Израиля.
"Воздушное присутствие позволяет нам решать задачи широкого спектра — от ближних угроз до крайне далеких", — объяснял военный.
Эшель настаивал, что ни один другой инструмент — будь то кибероружие, спецназ, сухопутные или морские силы — не сравнятся по эффективности с военно-воздушными силами, особенно когда боевые действия разворачиваются одновременно в нескольких направлениях.
"Армия обороны Израиля требует, чтобы мы были готовы к борьбе на трех театрах одновременно. Наши воздушные силы и средства могут утром работать на Северном направлении, в более отдаленных местах — днем, а уже в секторе Газа — вечером. При таких вызовах ВВС — незаменимая сила", — излагал командующий.
В свою очередь выступавший на той же конференции генерал ВВС США в отставке Гэри Норт, занимающий сейчас должность вице-президента в Lockheed Martin, тоже затронул угрозы, создаваемые российскими С-400 в Сирии, и указал на преимущества эксплуатации F-35 в условиях высокой угрозы.
"Сочетание скрытности и сенсорной интеграции — со спутниками и другими самолетами — дает отдельным летчикам возможность делиться получаемой информацией с другими пилотами, доводя эту информацию в том числе до командных пунктов на земле", — сказал американский военный.
По его словам, самолеты F-35 не только обеспечат стратегическое сдерживание противника, но и возможность для самолетов четвертого поколения — а и именно они на данный момент и составляют костяк ВВС Израиля и США — свободно передвигаться в воздушном пространстве где бы то ни было. По словам американского военного, F-35 использует стелс-технологии такого уровня, что они могут оставаться незамеченными, даже подойдя вплотную к противнику. Это позволит пилоту получить об объекте преследования максимально полное представление прежде, чем ему придется решать, атаковать ли цель или отступить.
Между тем, по данным аналитика Newsader в Израиле, пожелавшего остаться неназванным, полная оперативная готовность F-35 будет достигнута к 2018 году — именно в этом время самолет заступит на полноценную службу. В то же время он указал, что собственно модернизированный израильский вариант будет введен в действие не ранее 2022 года. Он подчеркнул, что в этом вопросе израильские производители будут зависеть от Америки.
Понятно что противостояние С-400 и Ф-35 возможно лишь гипотетически. Но вероятность что победа в такой схватке будет за Ф-35 весьма велика (процентов 80) за счет реализации новейших технологический решений.
Отредактировано: Alex_lee - 14 фев 2017 13:57:38
Сейчас на ветке:
7,
Модераторов: 0,
Пользователей: 0,
Гостей: 1,
Ботов: 6