ПВО/ПРО/ПКО
5,977,159
12,893

|
Верноразящий ( Слушатель ) |
| 22 май 2020 15:27:53 |
Троллинг?
новая дискуссия Дискуссия 1.769"Звезда" не зас.. не испугалась и выложила час назад.
В комментариях ад...
ОТВЕТЫ (91)


|
BlackShark ( Эксперт ) |
| 24 май 2020 19:53:16 |
Цитата: Danila96 от 22.05.2020 16:15:47
"Черепаха" и "Точки" уничтожала, что тут такого? Хотя и не должна была.

|
|
fugu01 ( Слушатель ) |
| 23 май 2020 22:49:16 |
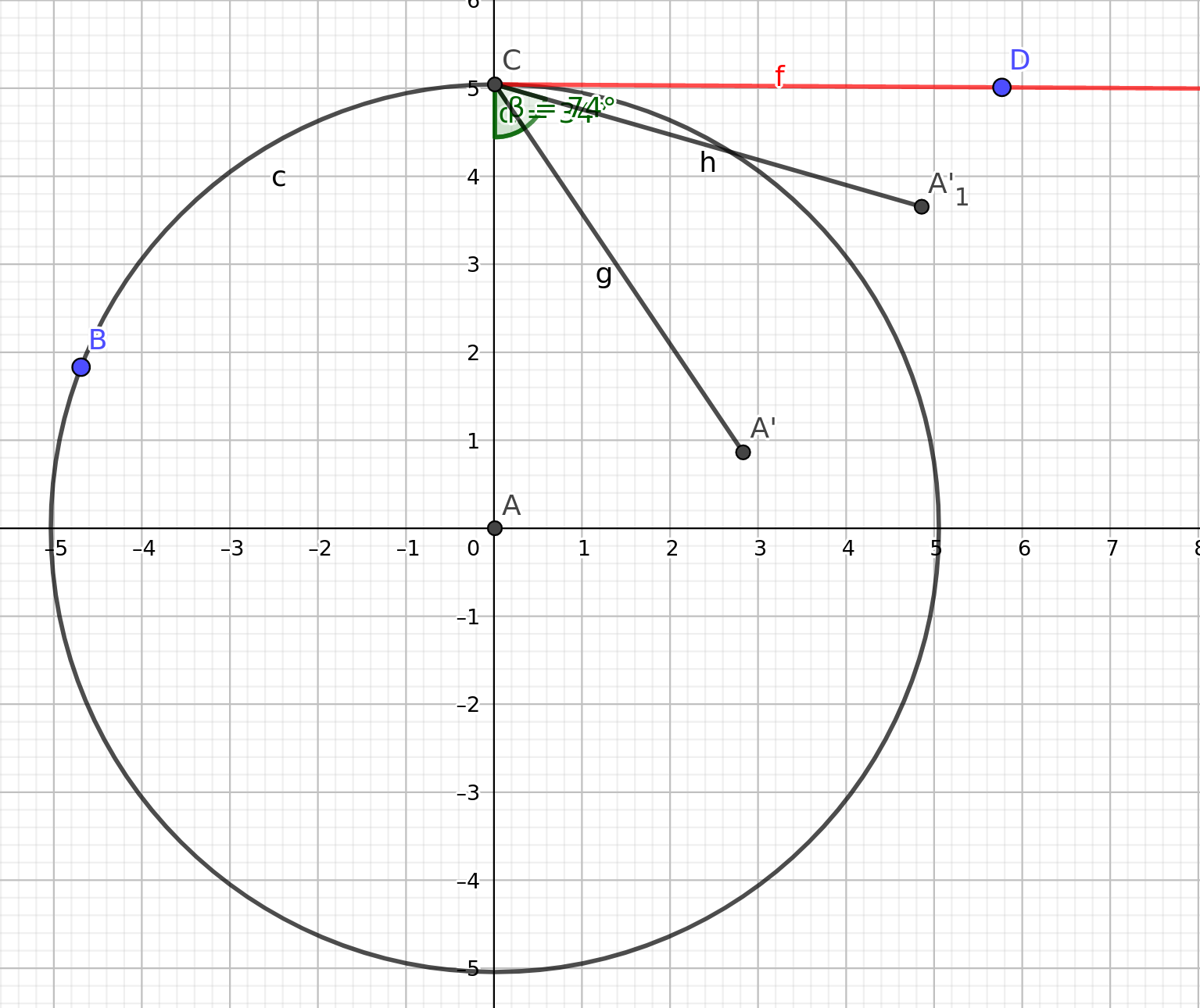
Для одинокого Пациря Байрактар ТБ2 намного опаснее крылатой ракеты. Скорость ТБ2 - 36м/с. Если угол между вектором скорости ТБ2 и направлением на Панцирь больше 34 градусов, то СОЦ Панциря не видит ТБ2, а если этот угол больше 74 градусов, то его не увидит и 1РС2-1Е. Если ТБ2, как модельный пример, с расстояния 72 км до одинокого Панциря начнет лететь удерживая указанный угол в 74 градуса (не менее 74 градусов, но меньше 90 градусов), то через 2 часа (от 2-х часов) он окажется над Панцирем и гарантированно не будет обнаружен его РЛ средствами в процессе сближения. Для Тора все аналогично, да еще и угол обзора в угломестной плоскости у Тора в 2 раза меньше, чем у Панциря.
З.Ы. Речь, естественно, идет об обсуждаемымых Панцирях.
|
|
su30 ( Слушатель ) |
| 23 май 2020 23:19:47 |
Цитата: fugu01 от 23.05.2020 22:49:16
Попытался нарисовать.
Центр, точка А - Панцирь
Точка С, наверху - БПЛА.
Угол ACA' - 34 градуса
Угол ACA'1 - 74 градуса
Угол ACD - прямой
Получается если держать траекторию в районе ACA'1 и ACD то это "слепая зона"? А можно пояснить почему, слишком малое изменение дистанции между сканированиями, меньше чем разрешение по дальности(ерунду, наверное, говорю, пытаюсь как-то слова подобрать)?
|
|
fugu01 ( Слушатель ) |
| 23 май 2020 23:35:23 |
Цитата: su30 от 23.05.2020 23:19:47
Да, если CA' для СОЦ и CA'1 для 1РС2-1Е рассматривать как вектор скорости ТБ2. СОЦ не видит цели с радиальной скоростью (по модулю) меньше 30 м/с, а 1РС2-1Е - меньше 10 м/с. Дело в том, что ТБ2 может очень долго летать и , следовательно, очень не торопясь сближаться.

|
Zanuda ( Слушатель ) |
| 24 май 2020 05:30:29 |
Цитата: fugu01 от 23.05.2020 22:49:16
Старая сказка о главном - цель летает, по спирали приближаясь к РЛС. При этом доплеровская скорость цели относительно РЛС приближается к нулю. Помогут либо оптические средства, либо недоплеровские РЛС.

|
|
fugu01 ( Слушатель ) |
| 24 май 2020 18:20:55 |
Цитата: sh0tek от 24.05.2020 05:36:18
О! Осталось ответить на пустяковый вопрос: какое должно быть расстояние между Панцирями, что бы время наблюдения ТБ2 было больше цикла стрельбы одного из Панцирей.
|
|
fugu01 ( Слушатель ) |
| 24 май 2020 18:17:08 |
Цитата: Zanuda от 24.05.2020 05:30:29
1. РЛС обсуждаемых Панцирей не доплеровские.
2. А есть обзорные оптические локаторы?
З.Ы. Для ТБ2 36м/c - крейсерская скорость на 24 часа полета. Интересно, какая у него эволютивная?
З.Ы.З.Ы. ТБ2 просто как пример под руку подвернулся.
|
|
Zanuda ( Слушатель ) |
| 25 май 2020 04:08:14 |
Цитата: fugu01 от 24.05.2020 18:17:08
откуда тогда зона режекции/слепых скоростей у СОЦ .
Тепловизионная и лазерные системы есть у Печоры-2М, но не в обзорном режиме, кажется
|
|
fugu01 ( Слушатель ) |
| 25 май 2020 20:14:53 |
Цитата: Zanuda от 25.05.2020 04:08:14
1. Работа СДЦ. Похоже на квазиненпрерывный сигнал.
2. Оптоэлектронная/тепловизионая есть и у Панциря, но это "прицельная", как и у Печоры-2М.

|
Художник967 ( Слушатель ) |
| 25 май 2020 23:50:07 |
Цитата: fugu01 от 24.05.2020 18:17:08
В принципе то есть, но у Панциря секторная.
ЦитатаУглы обзора:
- по азимуту - +-90 град (360 град с учетом вращения башни боевого модуля)
- по углу места - от -5 до +82 град.
|
|
PPL ( Слушатель ) |
| 25 май 2020 15:35:43 |
Цитата: Zanuda от 25.05.2020 15:09:04
.
Матобработка накопленного результата? Понятно, что полностью не решит, но если ангел начинает летать по кругу часами и всё ближе, то фитиль ему в зад.
.
Но вообще правильный твет уже был:
.

|
|
mse ( Специалист ) |
| 25 май 2020 16:58:51 |
Цитата: Zanuda от 25.05.2020 15:09:04
30 м/с вполне можно отперделить за пару-тройку оборотов. Местники и прочая бурда легко отфильтруются. Это-ж древняя, как говно мамонта метода. Ещо на трубах с памятью использовалась.
|
|
fugu01 ( Слушатель ) |
| 25 май 2020 20:34:43 |
Цитата: Zanuda от 25.05.2020 15:09:04
Для 92Н6Е официально указана минимальная радиальная скорость сопровождаемой цели - 0 м/c. Ее даже уже проверяли очень придирчево, все-равно получили 0 м/c. И она у нас такая не единственная.
|
|
Dev ( Слушатель ) |
| 24 май 2020 12:05:11 |
Цитата: fugu01 от 23.05.2020 22:49:16
Так же не стоит забывать про турбинный эффект, который создает работающий винт на ТБ2. Поэтому доплеровское смещение обеспечено, даже при нулевой радиальной скорости самого ТБ.
|
|
fugu01 ( Слушатель ) |
| 24 май 2020 18:26:40 |
Цитата: Dev от 24.05.2020 12:05:11
Это для доплеровской РЛС с непрерывным излучением имеет место быть. И то, в первичке. А тут все не так. И винт композитный.
|
|
BlackShark ( Эксперт ) |
| 24 май 2020 19:56:54 |
Цитата: fugu01 от 24.05.2020 18:26:40
Никакой проблемы перехватить столь крупный УБЛА нету. Вообще нету. Не выдумывайте на ровном месте.
Если, конечно, комплекс включен, и экипаж не кальяны курит где-то в стороне.
|
|
fugu01 ( Слушатель ) |
| 25 май 2020 20:27:26 |
BlackShark, выше даже картинка есть. Если радиальная скорость цели меньше 30 м/с, то СОЦ обсуждаемого Панциря, как и 96Л6Е, кстати, не видит ее вне зависимости от ее размеров (ЭПР, ЭОП). Для тихоходного долголетающего ЛА организовать незаметное сближение с такой РЛС гораздо проще, чем для скоростного и недолголетающего.
|
|
lock ( Слушатель ) |
| 25 май 2020 20:33:55 |
Цитата: fugu01 от 25.05.2020 20:27:26
Не понял, а висящий вертолет тогда как, со всеми скоростями = 0 ? А квадрик тогда вообще убервафля получается.
|
|
fugu01 ( Слушатель ) |
| 25 май 2020 20:54:47 |
Цитата: lock от 25.05.2020 20:33:55
У вертолета винт большой и ориентирован определенным образом. Малоскоростная малозаметная долголетающая цель - не простая штука для ПВО. Особенно в локальных войнах с ограниченным использованием средств ПВО.
|
|
lock ( Слушатель ) |
| 25 май 2020 21:58:47 |
Цитата: fugu01 от 25.05.2020 20:54:47
Эта констатация факта свидетельствует о беспомощности ПВО, Панциря в частности, перед пластмассовыми авиамоделями и мотопланерами или о чем то еще? Завершите ваши разъяснения пожалуйста, простое перечисление трудностей и технических проблем это как бы незавершенка, что делать то ?
Покинувший форум Равиль переживал по поводу грузинских дронов на этой площадке больше 10 лет тому назад. Неужто ничего не изменилось за это время ?
|
|
Художник967 ( Слушатель ) |
| 26 май 2020 00:35:09 |
Цитата: lock от 25.05.2020 21:58:47
Насколько помню, я ему советовал больше внимания уделить на РЭБ и отико-лазерные приборы обнаружения и подавления.
Это наиболее эффективно.
Можно конечно и как Фаланк стреляет, но вы представляете какой расход снарядов?

Панцирь сбивает квадрокоптер телеканала Звезда. Правда со второй попытки:
В упор стреляли, случайно попали.
Птичку жалко.

|
|
Kingle ( Слушатель ) |
| 25 май 2020 22:06:25 |
Цитата: fugu01 от 25.05.2020 20:54:47
Сколько раз дроны к Химкам рвались? Раз 10 за все годы, если считать то что в телек попало. Ни один не долетел. А там были и весьма малоразмерные образцы. Всех ПВО увидела и прожевала.
|
|
Foxhound ( Слушатель ) |
| 25 май 2020 22:10:58 |
Цитата: Kingle от 25.05.2020 22:06:25
Так там не одинокий Панцирь стоит. Маневр со спиральным приближением уже против двух несколько разнесенных Панцирей бесполезен.
|
|
Kingle ( Слушатель ) |
| 25 май 2020 22:33:34 |
Цитата: Foxhound от 25.05.2020 22:10:58
А, речь идет исключительно об очень одиноком Панцире? Ну вы затейники, граждане...
|
|
Foxhound ( Слушатель ) |
| 25 май 2020 22:34:44 |
Цитата: Kingle от 25.05.2020 22:33:34
Ну да, там изначально и было что одинокий БПЛА против одинокого Панциря по спирали подбирается.

|
ВТБ! ( Слушатель ) |
| 25 май 2020 22:37:17 |
Цитата: Foxhound от 25.05.2020 22:34:44
Проще численность "стаи" увеличить, чтобы осложнить селекцию настоящих "ударников" от поделок из дерьма и палок.
|
|
Kingle ( Слушатель ) |
| 25 май 2020 22:49:22 |
Цитата: Foxhound от 25.05.2020 22:34:44
А смысл такого обсуждения? Наши Панцири поодиночке в зоне БД не катаются, а как там извращаются всякие рукожопы из Ливии или ОАЭ - их половые трудности, хотя посмотреть порой любопытно, да.
P. S. Понял. Карантин, мы развлекаемся как можем

|
|
Foxhound ( Слушатель ) |
| 25 май 2020 22:53:08 |
Цитата: Kingle от 25.05.2020 22:49:22
Вообще делать так чтобы даже рукожоп смог бы справиться тоже важно.
В конце концов так будут чаще покупать.
|
|
свв812 ( Слушатель ) |
| 26 май 2020 00:37:14 |
Цитата: Foxhound от 25.05.2020 22:34:44
При этом отдельно взятый дятел, завороженный долгим кружением БЛА над Панцирем, может случайно уничтожить его лобовым столкновением - теоретически, если отдельно брать 1 Панцирь, 1 дятла и 1 БЛА.
Задача экипажа отдельного Панциря в таком случае - просто не спугнуть отдельного дятла. Это можно сделать, даже не прекращая пить матэ. Но и здесь есть множество мешающих факторов: вывести дятла из гипноза может, например, случайный громкий разрыв невдалеке на поле боя и т.д.
Теоретическая сложность задачи возрастает экспоненциально: в нее включается мощный подпласт вероятностного прогнозирования акустической картины боя в РВ и, в идеале, - упреждающе-антиспугивающего воздействия на неё... (УАВ).

А вообще, не хватает информации по Ливии и ПВО-шной движухе там. Ни здесь, ни на ливийской ветке. Турки скачут с переможными фейками, но это тамошние хохлы - чем выше скачут, тем сильней их в итоге раскорячивают. Но конкретики пока нет
|
|
Асгл ( Слушатель ) |
| 25 май 2020 23:38:55 |
Цитата: Foxhound от 25.05.2020 22:10:58
А представьте себе что черепаха будет своей головой вертеть в противофазе атакуещего бпла, а не как тут пытаются некоторые совищу на элипсоид натянуть?
|
|
Dev ( Слушатель ) |
| 25 май 2020 23:00:01 |
Цитата: fugu01 от 25.05.2020 20:54:47
Винт постоянно вращается, и следовательно выдержать постоянные углы отражения, не представляется возможным. Поэтому на ориентацию его можно забить. Да и слово "композитный" винт не означает радиопрозрачный в диапазоне длин волн Панциря. Так что проблема малой радиальной скорости, даже для одинокого Панциря против ТБ2 - мягко говоря "притянута за уши". Уж извините.
|
|
fugu01 ( Слушатель ) |
| 06 июн 2020 16:52:31 |
Цитата: Dev от 03.06.2020 10:08:41
1. А Ан-2 и пресловутая Цессна не входят в понятие "легкомоторный самолет"? Если входят, то и про них сказано 15 м/с. Иначе бы раздели по типу двигателя: для ВРД была бы одна скорость, а для винтовых - другая.
2.
2.1. Потому, что за время облучения винта зондирующим импульсом меньше, чем время поворота винта на 1 градус. Следовательно и уровень отраженного сигнала будет разным для разных ориентаций лопастей лвухлопастного винта относительно линии визирования. С увеличением количества лопастей влияние ориентации каждой лопасти снижается.
2.2. Что бы получить вертолетный вариант для ТБ2, его надо "подвесить" носом вниз или вверх, а не лететь с курсовым 90 градусов. Ориентация плоскости вращения винта важна относительно плоскости поляризации зондирующего сигнала.
2.3. На курсовых,отличных от 90 градусов, площадь винта будет расти, а радиальная скорость - падать. Если скорость вращения винта перпендикулярна линии визирования, то добавка к его радиальной скорости от его вращения равна нулю, хотя ЭПР винта максимален.
2.3. На обсуждаемых углах уровень и спектр отраженного от винта сигнала будет зависеть от ориентации лопасти относительно линии визирования в момент "попадания" зондирующего импульса на лопасть.
|
|
Zanuda ( Слушатель ) |
| 26 май 2020 03:52:38 |
Цитата: fugu01 от 25.05.2020 20:27:26
Совершенно неправильное утверждение. У 96Л6 отсутствует зона режекции. Правда это приводит к повышенному уровню помех в нижней ближней зоне. Но это легко компенсируется алгоритмами завязки трасс. Кроме того, все таки, у этой автоматической РЛС в последних версиях ПО имеется возможность ВРУЧНУЮ установить скорость в зоне режекции и запретить автоматическую завязку трасс в определяемых оператором областях

|
|
Художник967 ( Слушатель ) |
| 24 май 2020 00:39:00 |
Что то не видно кого они там уничтожили, тем более из пушек.
Стрельба из пушек по висящей на парашюте мине. Стандартная цель на полигоне:
Стрельба Панциря по мишени Е95 :
Посмотрим, как Деривация по таким целям будет стрелять...