Жизнь, Разум, Человек, Религия и Наука
149,923
565


64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Понятия, аксиомы и принципы русики
Слишком не пугайтесь – я не собираюсь выкладывать здесь сухой, строго научный текст, подобный современному учебнику физики/математики. Мы все же на форуме, и я постараюсь ограничиться только наиболее важными и наглядными вещами, по возможности не злоупотребляя математикой и наукообразным языком. Для любителей строгости замечу, что некоторые аксиомы, которые я ввожу, не являются аксиомами в математическом смысле, это скорее определения исходных понятий и, возможно, эти определения недостаточно строги и однозначны. Я пока просто попытаюсь сформулировать, чем русика отличается от физики, и взаимопонимание с читателями для меня сейчас важнее, чем строгость.
Часть аксиом и понятий русики совпадает с аксиомами и понятиями классической физики, что вряд ли является неожиданным. Часть – отличается. По понятным причинам, им мы и будем уделять основное внимание. Но начну я с тех аксиом, которые практически идентичны таковым классической физики.
Аксиома 1: Вселенная представляет собой трехмерное пространство, заполненное средой, элементы которой движутся относительно пространства и друг относительно друга.
Здесь пространство – это просто абсолютная пустота. Эта пустота – не вакуум современной физики, который является средой для распространения электромагнитных и гравитационных полей и волн. Тем более это не т.н. «физический вакуум», в котором непрерывно рождаются и исчезают виртуальные частицы. Для того, чтобы через пространство русики могли распространяться, скажем, свет или гравитация от далеких звезд, оно должно быть заполнено средой – эфиром. Через пустое пространство ни свет, ни гравитация распространяться не могут.
Что представляет из себя среда? В каких-то задачах, это газ, жидкость, твердое тело. В каких-то – эфир, свойства которого мы будем стараться установить (не будем постулировать их с самого начала). Собственно, газ, жидкость и твердое тело – это формы существования вещества, состоящего из атомов и элементарных частиц, которые сами (как я надеюсь показать позже) представляют из себя волновые процессы в эфире. То есть в основе любой среды русики лежит эфир.
Аксиома 2: Трехмерное пространство русики – эвклидово, нулевой кривизны.
Оговорка 1: В блаженные времена XVIII – XIX веков этого было бы достаточно, но теперь джинн выпущен из бутылки и мы понимаем, что могут быть и другие геометрии нашей Вселенной. Мы их пока рассматривать не будем, ограничимся эвклидовой геометрией, но не будем забывать, что аксиомы Эвклида – это все-таки недоказуемые утверждения, так что реальная геометрия нашей Вселенной может быть иной. Этот вопрос тесно связан с вопросом, бесконечна ли Вселенная. Если когда-нибудь появятся основания полагать, что Вселенная все-таки замкнута и пространство на космологических масштабах (порядка миллиардов или триллионов световых лет) искривлено, то появится и неевклидова русика. Но эту возможность мы оставляем только для космологических масштабов. Никакого искривления пространства вблизи тел, обладающих массой, в русике нет. Никакого «сжатия» пространства внутри движущихся тел при релятивистских скоростях тоже нет. Больше про неевклидову русику я говорить не буду, всё, что будет написано ниже, относится исключительно к эвклидовой русике, которую для простоты я буду называть просто русика.
Аксиома 3: Пространство не эквивалентно среде, а время не эквивалентно показаниям часов.
Объясню это на следующих примерах из физики. Допустим, что гипотеза Лоренца-Фитцджеральда верна (хотя в русике это не так) –движущееся тело сжимается в гамма раз по направлению движения. Аксиома 3 утверждает, что сжатие движущегося тела совершенно не эквивалентно сжатию в нем пространства. Допустим также, что что-то подобное эффектам Общей Теории Относительности имеет место в реальности, то есть, скажем, среда (эфир) вокруг массивного тела искривляется, что проявляется в искривлении траекторий лучей света, а все часы замедляют свой ход. Но это будут именно искривления в среде, но не искривления самого пространства, и замедление хода часов, а не замедление хода времени.
Собственно, именно такова была первоначальная интерпретация уравнений Лоренца «классическими физиками» (включая самого Лоренца). Так что русика здесь не оригинальна, она лишь разделяет взгляды классической физики на отличия между пространством и средой, временем и показаниями часов. Это уже сомнительное «достижение» теории относительности и лично А. Эйнштейна, что границы между этими понятиями исчезли.
Аксиома 4: Пространство и время абсолютны, они не зависят ни от каких процессов, происходящих в эфире.
Опять же, классическая физика именно так и относилась к пространству и времени.
Аксиома 5: Пустого пространства не существует, оно всегда заполнено эфиром.
Оговорка 2: Для большинства задач, имеет смысл рассматривать только пространство, заполненное эфиром. Тем не менее, этот вопрос можно оставить открытым (на будущее). Не стоит полностью и навсегда исключать возможность существования во Вселенной пустого пространства (скажем, на периферии Вселенной, или на ранних этапах ее существования), сквозь которое не могут распространяться электромагнитные и гравитационные поля и волны. Возможно, это поможет ответить на какие-то будущие вопросы и загадки.
Аксиома 6: Во Вселенной существует абсолютная система отсчета (АСО), связанная с эфиром.
Это тоже точка зрения классической физики. Части эфира могут двигаться в разных направлениях и с разными скоростями, могут встречаться маленькие или большие вихри эфира (проявлением чего, возможно, являются спиральные галактики). Но подобно тому, как в сосуде, заполненном газом, молекулы двигаются во всевозможных направлениях, но газ в целом неподвижен относительно сосуда, или в океане есть течения и водовороты, но океан в целом неподвижен относительно континентов, точно так же и в эфире должна существовать избранная система отсчета, относительно которой эфир в целом неподвижен. Можно предположить, что это система отсчета, связанная с космическим микроволновым фоновым излучением Вселенной, относительно которого Солнечная система движется со скоростью ~370 км/ч в направлении созвездия Девы.
Слишком не пугайтесь – я не собираюсь выкладывать здесь сухой, строго научный текст, подобный современному учебнику физики/математики. Мы все же на форуме, и я постараюсь ограничиться только наиболее важными и наглядными вещами, по возможности не злоупотребляя математикой и наукообразным языком. Для любителей строгости замечу, что некоторые аксиомы, которые я ввожу, не являются аксиомами в математическом смысле, это скорее определения исходных понятий и, возможно, эти определения недостаточно строги и однозначны. Я пока просто попытаюсь сформулировать, чем русика отличается от физики, и взаимопонимание с читателями для меня сейчас важнее, чем строгость.
Часть аксиом и понятий русики совпадает с аксиомами и понятиями классической физики, что вряд ли является неожиданным. Часть – отличается. По понятным причинам, им мы и будем уделять основное внимание. Но начну я с тех аксиом, которые практически идентичны таковым классической физики.
Аксиома 1: Вселенная представляет собой трехмерное пространство, заполненное средой, элементы которой движутся относительно пространства и друг относительно друга.
Здесь пространство – это просто абсолютная пустота. Эта пустота – не вакуум современной физики, который является средой для распространения электромагнитных и гравитационных полей и волн. Тем более это не т.н. «физический вакуум», в котором непрерывно рождаются и исчезают виртуальные частицы. Для того, чтобы через пространство русики могли распространяться, скажем, свет или гравитация от далеких звезд, оно должно быть заполнено средой – эфиром. Через пустое пространство ни свет, ни гравитация распространяться не могут.
Что представляет из себя среда? В каких-то задачах, это газ, жидкость, твердое тело. В каких-то – эфир, свойства которого мы будем стараться установить (не будем постулировать их с самого начала). Собственно, газ, жидкость и твердое тело – это формы существования вещества, состоящего из атомов и элементарных частиц, которые сами (как я надеюсь показать позже) представляют из себя волновые процессы в эфире. То есть в основе любой среды русики лежит эфир.
Аксиома 2: Трехмерное пространство русики – эвклидово, нулевой кривизны.
Оговорка 1: В блаженные времена XVIII – XIX веков этого было бы достаточно, но теперь джинн выпущен из бутылки и мы понимаем, что могут быть и другие геометрии нашей Вселенной. Мы их пока рассматривать не будем, ограничимся эвклидовой геометрией, но не будем забывать, что аксиомы Эвклида – это все-таки недоказуемые утверждения, так что реальная геометрия нашей Вселенной может быть иной. Этот вопрос тесно связан с вопросом, бесконечна ли Вселенная. Если когда-нибудь появятся основания полагать, что Вселенная все-таки замкнута и пространство на космологических масштабах (порядка миллиардов или триллионов световых лет) искривлено, то появится и неевклидова русика. Но эту возможность мы оставляем только для космологических масштабов. Никакого искривления пространства вблизи тел, обладающих массой, в русике нет. Никакого «сжатия» пространства внутри движущихся тел при релятивистских скоростях тоже нет. Больше про неевклидову русику я говорить не буду, всё, что будет написано ниже, относится исключительно к эвклидовой русике, которую для простоты я буду называть просто русика.
Аксиома 3: Пространство не эквивалентно среде, а время не эквивалентно показаниям часов.
Объясню это на следующих примерах из физики. Допустим, что гипотеза Лоренца-Фитцджеральда верна (хотя в русике это не так) –движущееся тело сжимается в гамма раз по направлению движения. Аксиома 3 утверждает, что сжатие движущегося тела совершенно не эквивалентно сжатию в нем пространства. Допустим также, что что-то подобное эффектам Общей Теории Относительности имеет место в реальности, то есть, скажем, среда (эфир) вокруг массивного тела искривляется, что проявляется в искривлении траекторий лучей света, а все часы замедляют свой ход. Но это будут именно искривления в среде, но не искривления самого пространства, и замедление хода часов, а не замедление хода времени.
Собственно, именно такова была первоначальная интерпретация уравнений Лоренца «классическими физиками» (включая самого Лоренца). Так что русика здесь не оригинальна, она лишь разделяет взгляды классической физики на отличия между пространством и средой, временем и показаниями часов. Это уже сомнительное «достижение» теории относительности и лично А. Эйнштейна, что границы между этими понятиями исчезли.
Аксиома 4: Пространство и время абсолютны, они не зависят ни от каких процессов, происходящих в эфире.
Опять же, классическая физика именно так и относилась к пространству и времени.
Аксиома 5: Пустого пространства не существует, оно всегда заполнено эфиром.
Оговорка 2: Для большинства задач, имеет смысл рассматривать только пространство, заполненное эфиром. Тем не менее, этот вопрос можно оставить открытым (на будущее). Не стоит полностью и навсегда исключать возможность существования во Вселенной пустого пространства (скажем, на периферии Вселенной, или на ранних этапах ее существования), сквозь которое не могут распространяться электромагнитные и гравитационные поля и волны. Возможно, это поможет ответить на какие-то будущие вопросы и загадки.
Аксиома 6: Во Вселенной существует абсолютная система отсчета (АСО), связанная с эфиром.
Это тоже точка зрения классической физики. Части эфира могут двигаться в разных направлениях и с разными скоростями, могут встречаться маленькие или большие вихри эфира (проявлением чего, возможно, являются спиральные галактики). Но подобно тому, как в сосуде, заполненном газом, молекулы двигаются во всевозможных направлениях, но газ в целом неподвижен относительно сосуда, или в океане есть течения и водовороты, но океан в целом неподвижен относительно континентов, точно так же и в эфире должна существовать избранная система отсчета, относительно которой эфир в целом неподвижен. Можно предположить, что это система отсчета, связанная с космическим микроволновым фоновым излучением Вселенной, относительно которого Солнечная система движется со скоростью ~370 км/ч в направлении созвездия Девы.
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Различия между исходными понятиями физики и русики
Есть такое популярное выражение: «Законы физики еще никто не отменял». Как вы понимаете, оно более не соответствует реальности. Потому что именно это я и делаю – отменяю законы физики. Иными словами, аксиомы физики. У русики другие законы (аксиомы). То, что было (или казалось) очевидным в рамках физики, более таковым не является. Это очень сильное утверждение, но означает оно не то, что моя мания величия заходит настолько далеко, что я считаю себя равным Богу-Творцу Вселенной. Нет – я всего лишь утверждаю, что некоторые аксиомы физики неверны и потому практически вся физика ошибочна.
Те аксиомы, о которых шла речь в предыдущей главе, практически совпадают и в классической физике, и в русике. Теперь давайте перейдем к тому, что отличает русику от классической физики. Еще раз – отличия эти чрезвычайно просты и элементарны, примерно на том же уровне сложности, как перенесение bn в правую часть уравнения Ферма. Я об этом предупреждал с самого начала (кто не спрятался, я не виноват).
В классической физике ключевую роль играют понятия «система отсчета», Принцип Относительности Движения Галилея и Второй Закон Ньютона (не буду приводить их определения, чтобы не загромождать текст). Вместо них, в русике ключевую роль играют понятие «среда отсчета», Принцип Дуализма Движения и Принцип Аберрации.
В физике, движение какого-либо тела или волны можно равноправно описать в разных системах отсчета, двигающихся друг относительно друга с разными скоростями. Каждая система отсчета имеет свою собственную систему координат – x₁, y₁, z₁ , или x₂, y₂, z₂, или x₃, y₃, z₃, и т.д. – в которых и описывается движение тела или волны. Подчеркну, что в физике для описания движения достаточно только одной системы отсчета и связанной с ней системы координат.
В русике, постулируется, что любое движение тела или волны всегда происходит сквозь какую-то среду (поскольку пустого пространства не существует), и этим движением относительно среды нельзя пренебрегать, оно не сводится к движению тела или волны относительно наблюдателя. Назовем среду, сквозь которую движется наблюдаемое тело или волна, «средой отсчета». Во многих задачах русики встречаются разные среды (чьи свойства, например, плотность, могут различаться), а кроме того, разные элементы среды движутся с разными скоростями, так что имеет смысл использовать термин «элемент среды отсчета» (ЭСО). Каждый ЭСО имеет свою внутреннюю систему координат, причем оси координат не уходят в бесконечность, а имеют конечные размеры, совпадающие с размерами ЭСО.
Русика, далее, постулирует, что любое движение всегда состоит из двух отдельных компонент: движение наблюдаемого тела или волны относительно ЭСО, в его внутренней системе координат, и движение этого ЭСО относительно системы отсчета наблюдателя (СОН), в системе координат, привязанной к данной СОН. В этом и заключается Принцип Дуализма Движения. Во избежание двусмысленности или непонимания, подчеркну, что первый компонент (движение наблюдаемого тела или волны относительно ЭСО) означает, что ЭСО считается покоящимся, а наблюдаемое тело или волна движется относительно него.
Аксиома 7 (Принцип Дуализма Движения): Движение любого тела или волны относительно наблюдателя состоит из двух независимых компонентов: движения наблюдаемого тела или волны относительно элемента среды отсчета и движения элемента среды отсчета относительно наблюдателя.
Теперь нам надо придумать подходящие термины для обозначения этих двух видов движения. Я долго ломал голову (и язык) над разными вариантами и в конце концов пришел к выводу, что надо воспользоваться классическим способом создания новых научных терминов – использовать древнегреческий или латынь. Пусть будет латынь.
На латыни, «относительно наблюдателя» будет «relative ad aspicientis», «относительно среды» – «relative ad medium», а «сквозь среду» – «per medium». Думаю, для краткости можно убрать «relative» и оставить только «ad aspicientis» (к наблюдателю), а вместо «ad medium» (к среде) лучше использовать «per medium» (сквозь среду), поскольку тело движется именно сквозь среду, а не к ней.
Принципиально важно, что движение тела или волны per medium все наблюдатели описывают одинаково, оно, можно сказать, является абсолютным, и только движение ЭСО ad aspicientis выглядит по-разному для разных наблюдателей, то есть является относительным (в том же смысле, как относительность употребляется в физике). Иными словами, движение per medium объективно, а движение ad aspicientis – субъективно. В физике, напомню, любое движение относительно, то есть субъективно.
Какими буквами нам обозначить координаты ЭСО и СОН? Ранее я использовал x, y, z для обозначения системы координат некой системы отсчета и ξ, η, ζ для обозначения координат источника волн в этой системе отсчета. Давайте будем использовать большие буквы X, Y, Z для обозначения внутренних координат ЭСО (большие буквы как раз подчеркивают абсолютный, или объективный, характер движения относительно этих координат). Оси X, Y, Z, разумеется, не обязаны совпадать с осями x, y, z. Если таких элементов у нас будет много, то их внутренние координаты будут с индексами: X₁, Y₁, Z₁, X₂, Y₂, Z₂, X₃, Y₃, Z₃, и т.д.
Опять же во избежание двусмысленности и непонимания, подчеркну, что, например, векторы скорости движения тела per medium и скорости движения ЭСО ad aspicientis не складываются в один суммарный вектор. Правило сложения векторов здесь не применяется. Это два независимых вектора и они оба необходимы для описания движения тела. То же касается и векторов позиции тела внутри ЭСО и позиции этого ЭСО в некой СОН: вектора не складываются, они оба необходимы для описания движущегося тела (или волны). Аналогично для ускорений: каждому движущемуся тел соответствуют два вектора ускорения – вектор ускорения тела относительно ЭСО и вектор ускорения данного элемента относительно СОН.
Как это обозначить математически? Вместо одного вектора скорости, как в физике, мы имеем два: вектор скорости наблюдаемого тела per medium V(VX, VY, VZ) и вектор скорости ЭСО ad aspicientis v(vx, vy, vz). Обозначим их как «двойной вектор» с 6 компонентами: V⨁v(VX, VY, VZ, vx, vy, vz). В принципе, этот двойной вектор можно было бы представить и в виде матрицы вида
Эта матрица похожа на тензор, но им не является, поскольку верхняя и нижняя строчки данной матрицы ведут себя совершенно по-разному при переходе от одной системы отсчета к другой: верхняя строчка выглядит одинаково для всех наблюдателей, а вот нижняя строчка у разных наблюдателей отличается. У тензора же при переходе от одной системы отсчета к другой должны измениться компоненты и верхней, и нижней строчки матрицы.
Речь здесь идет только о форме записи, об обозначениях. Наверно, запись в виде матрицы с двумя строчками лучше не использовать, чтобы не было путаницы с тензорами. Будем пока использовать двойные векторы с 6 компонентами в одной строке – как V⨁v(VX, VY, VZ, vx, vy, vz).
Еще раз, я не математик и не претендую на исключительное знание математики – несмотря на то, что я утверждаю, что физика неверна именно потому, что она использует неверную математику. Но я шел к пониманию этого со стороны физики, а не математики. Так что я знаком далеко не со всеми обозначениями математических понятий (да и с самими понятиями, чего греха таить…). В физике, понятие двойных векторов мне не встречалось. Если же и в математике оно отсутствует, то русика потребует создания нового раздела математики. Здесь есть математики? Буду благодарен за экспертное мнение.
В отличие от русики, физика использует не два вектора V и v по отдельности, а только их векторную сумму V + v c 3 компонентами (VX + vx, VY + vy, VZ + vz). Это равнозначно использованию вместо отдельных компонент вектора (a, b, c) только скалярной длины этого вектора (a² + b² + c²)½, или, вместо 9 компонент тензора напряжений, использованию обычного вектора с 3 компонентами, просуммировав значения столбиков матрицы. Как следствие этого неоправданного упрощения, физика «не видит» многих особенностей движения и приводит к ложным выводам (а русика всёёёоооооо видит…).
Разумеется, и в русике мы можем определить векторную сумму V + v и использовать ее в каких-то задачах. Подобно этому, зная (x, y, z) компоненты какого-то вектора, можно определить его длину, в ряде задач она нужна. Но если вы знаете только длину вектора, ваши знания о нем весьма неполны и очень многого о поведении исследуемой вами системы вы не узнаете.
Далее, вместо одного радиус-вектора, описывающего позицию движущейся материальной точки, мы имеем два вектора R(X, Y, Z) и r(x, y, z). Их двойной вектор будет R⨁r(X, Y, Z, x, y, z). Аналогично, два вектора ускорений A(AX, AY, AZ) и a(ax, ay, az) образуют двойной вектор A⨁a(AX, AY, AZ, ax, ay, az). Так же со всеми векторами.
О математических манипуляциях над двойными векторами, в частности, о действии на них различных операторов, я буду говорить позже.
Есть такое популярное выражение: «Законы физики еще никто не отменял». Как вы понимаете, оно более не соответствует реальности. Потому что именно это я и делаю – отменяю законы физики. Иными словами, аксиомы физики. У русики другие законы (аксиомы). То, что было (или казалось) очевидным в рамках физики, более таковым не является. Это очень сильное утверждение, но означает оно не то, что моя мания величия заходит настолько далеко, что я считаю себя равным Богу-Творцу Вселенной. Нет – я всего лишь утверждаю, что некоторые аксиомы физики неверны и потому практически вся физика ошибочна.
Те аксиомы, о которых шла речь в предыдущей главе, практически совпадают и в классической физике, и в русике. Теперь давайте перейдем к тому, что отличает русику от классической физики. Еще раз – отличия эти чрезвычайно просты и элементарны, примерно на том же уровне сложности, как перенесение bn в правую часть уравнения Ферма. Я об этом предупреждал с самого начала (кто не спрятался, я не виноват).
В классической физике ключевую роль играют понятия «система отсчета», Принцип Относительности Движения Галилея и Второй Закон Ньютона (не буду приводить их определения, чтобы не загромождать текст). Вместо них, в русике ключевую роль играют понятие «среда отсчета», Принцип Дуализма Движения и Принцип Аберрации.
В физике, движение какого-либо тела или волны можно равноправно описать в разных системах отсчета, двигающихся друг относительно друга с разными скоростями. Каждая система отсчета имеет свою собственную систему координат – x₁, y₁, z₁ , или x₂, y₂, z₂, или x₃, y₃, z₃, и т.д. – в которых и описывается движение тела или волны. Подчеркну, что в физике для описания движения достаточно только одной системы отсчета и связанной с ней системы координат.
В русике, постулируется, что любое движение тела или волны всегда происходит сквозь какую-то среду (поскольку пустого пространства не существует), и этим движением относительно среды нельзя пренебрегать, оно не сводится к движению тела или волны относительно наблюдателя. Назовем среду, сквозь которую движется наблюдаемое тело или волна, «средой отсчета». Во многих задачах русики встречаются разные среды (чьи свойства, например, плотность, могут различаться), а кроме того, разные элементы среды движутся с разными скоростями, так что имеет смысл использовать термин «элемент среды отсчета» (ЭСО). Каждый ЭСО имеет свою внутреннюю систему координат, причем оси координат не уходят в бесконечность, а имеют конечные размеры, совпадающие с размерами ЭСО.
Русика, далее, постулирует, что любое движение всегда состоит из двух отдельных компонент: движение наблюдаемого тела или волны относительно ЭСО, в его внутренней системе координат, и движение этого ЭСО относительно системы отсчета наблюдателя (СОН), в системе координат, привязанной к данной СОН. В этом и заключается Принцип Дуализма Движения. Во избежание двусмысленности или непонимания, подчеркну, что первый компонент (движение наблюдаемого тела или волны относительно ЭСО) означает, что ЭСО считается покоящимся, а наблюдаемое тело или волна движется относительно него.
Аксиома 7 (Принцип Дуализма Движения): Движение любого тела или волны относительно наблюдателя состоит из двух независимых компонентов: движения наблюдаемого тела или волны относительно элемента среды отсчета и движения элемента среды отсчета относительно наблюдателя.
Теперь нам надо придумать подходящие термины для обозначения этих двух видов движения. Я долго ломал голову (и язык) над разными вариантами и в конце концов пришел к выводу, что надо воспользоваться классическим способом создания новых научных терминов – использовать древнегреческий или латынь. Пусть будет латынь.
На латыни, «относительно наблюдателя» будет «relative ad aspicientis», «относительно среды» – «relative ad medium», а «сквозь среду» – «per medium». Думаю, для краткости можно убрать «relative» и оставить только «ad aspicientis» (к наблюдателю), а вместо «ad medium» (к среде) лучше использовать «per medium» (сквозь среду), поскольку тело движется именно сквозь среду, а не к ней.
Принципиально важно, что движение тела или волны per medium все наблюдатели описывают одинаково, оно, можно сказать, является абсолютным, и только движение ЭСО ad aspicientis выглядит по-разному для разных наблюдателей, то есть является относительным (в том же смысле, как относительность употребляется в физике). Иными словами, движение per medium объективно, а движение ad aspicientis – субъективно. В физике, напомню, любое движение относительно, то есть субъективно.
Какими буквами нам обозначить координаты ЭСО и СОН? Ранее я использовал x, y, z для обозначения системы координат некой системы отсчета и ξ, η, ζ для обозначения координат источника волн в этой системе отсчета. Давайте будем использовать большие буквы X, Y, Z для обозначения внутренних координат ЭСО (большие буквы как раз подчеркивают абсолютный, или объективный, характер движения относительно этих координат). Оси X, Y, Z, разумеется, не обязаны совпадать с осями x, y, z. Если таких элементов у нас будет много, то их внутренние координаты будут с индексами: X₁, Y₁, Z₁, X₂, Y₂, Z₂, X₃, Y₃, Z₃, и т.д.
Опять же во избежание двусмысленности и непонимания, подчеркну, что, например, векторы скорости движения тела per medium и скорости движения ЭСО ad aspicientis не складываются в один суммарный вектор. Правило сложения векторов здесь не применяется. Это два независимых вектора и они оба необходимы для описания движения тела. То же касается и векторов позиции тела внутри ЭСО и позиции этого ЭСО в некой СОН: вектора не складываются, они оба необходимы для описания движущегося тела (или волны). Аналогично для ускорений: каждому движущемуся тел соответствуют два вектора ускорения – вектор ускорения тела относительно ЭСО и вектор ускорения данного элемента относительно СОН.
Как это обозначить математически? Вместо одного вектора скорости, как в физике, мы имеем два: вектор скорости наблюдаемого тела per medium V(VX, VY, VZ) и вектор скорости ЭСО ad aspicientis v(vx, vy, vz). Обозначим их как «двойной вектор» с 6 компонентами: V⨁v(VX, VY, VZ, vx, vy, vz). В принципе, этот двойной вектор можно было бы представить и в виде матрицы вида
Эта матрица похожа на тензор, но им не является, поскольку верхняя и нижняя строчки данной матрицы ведут себя совершенно по-разному при переходе от одной системы отсчета к другой: верхняя строчка выглядит одинаково для всех наблюдателей, а вот нижняя строчка у разных наблюдателей отличается. У тензора же при переходе от одной системы отсчета к другой должны измениться компоненты и верхней, и нижней строчки матрицы.
Речь здесь идет только о форме записи, об обозначениях. Наверно, запись в виде матрицы с двумя строчками лучше не использовать, чтобы не было путаницы с тензорами. Будем пока использовать двойные векторы с 6 компонентами в одной строке – как V⨁v(VX, VY, VZ, vx, vy, vz).
Еще раз, я не математик и не претендую на исключительное знание математики – несмотря на то, что я утверждаю, что физика неверна именно потому, что она использует неверную математику. Но я шел к пониманию этого со стороны физики, а не математики. Так что я знаком далеко не со всеми обозначениями математических понятий (да и с самими понятиями, чего греха таить…). В физике, понятие двойных векторов мне не встречалось. Если же и в математике оно отсутствует, то русика потребует создания нового раздела математики. Здесь есть математики? Буду благодарен за экспертное мнение.
В отличие от русики, физика использует не два вектора V и v по отдельности, а только их векторную сумму V + v c 3 компонентами (VX + vx, VY + vy, VZ + vz). Это равнозначно использованию вместо отдельных компонент вектора (a, b, c) только скалярной длины этого вектора (a² + b² + c²)½, или, вместо 9 компонент тензора напряжений, использованию обычного вектора с 3 компонентами, просуммировав значения столбиков матрицы. Как следствие этого неоправданного упрощения, физика «не видит» многих особенностей движения и приводит к ложным выводам (а русика всёёёоооооо видит…).
Разумеется, и в русике мы можем определить векторную сумму V + v и использовать ее в каких-то задачах. Подобно этому, зная (x, y, z) компоненты какого-то вектора, можно определить его длину, в ряде задач она нужна. Но если вы знаете только длину вектора, ваши знания о нем весьма неполны и очень многого о поведении исследуемой вами системы вы не узнаете.
Далее, вместо одного радиус-вектора, описывающего позицию движущейся материальной точки, мы имеем два вектора R(X, Y, Z) и r(x, y, z). Их двойной вектор будет R⨁r(X, Y, Z, x, y, z). Аналогично, два вектора ускорений A(AX, AY, AZ) и a(ax, ay, az) образуют двойной вектор A⨁a(AX, AY, AZ, ax, ay, az). Так же со всеми векторами.
О математических манипуляциях над двойными векторами, в частности, о действии на них различных операторов, я буду говорить позже.
Отредактировано: Yuri Rus - 02 дек 2019 13:54:52
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Введем еще одну аксиому, которая совпадает и в русике, и в классической физике (но не в релятивистской физике).
Аксиома 8: Все тела, среды и их расположение относительно друг друга в фиксированный момент времени выглядят одинаково во всех системах отсчета.
Координаты этих тел в разных системах отсчета отличаются. Но сами тела и среды, их форма, взаимное расположение, выглядят одинаково во всех системах отсчета.
То есть все наблюдатели, с какими скоростями они бы ни двигались, согласятся, что, скажем, деревянный столб, Пизанская башня, идущий мимо нее человек и едущая мимо машина в момент времени t₁ ориентированы в пространстве друг относительно друга совершенно определенным образом. «Мгновенные снимки» этих тел будут выглядеть одинаково во всех системах отсчета (СО), если наблюдатели, движущиеся с разными скоростями, в момент снятия этих снимков оказались очень близко друг к другу, почти в одной точке.
Если на этих снимках столб расположен перпендикулярно поверхности Земли в одной СО, то он будет перпендикулярен ей и во всех других СО. Его размеры будут одинаковы во всех СО. Если соединить прямой линией две точки – одну сверху, А, другую снизу столба, В, то вектор АВ будет выглядеть совершенно одинаково во всех СО. Если Пизанская башня наклонена в одной СО под углом 3° 54' относительно поверхности Земли, то она будет наклонена под тем же углом относительно поверхности Земли и во всех других СО. Расстояния (и вектора) от Пизанской башни до идущего мимо нее человека и едущей мимо машины в момент t₁ будут одинаковы для всех наблюдателей.
Аксиома 8 нам вскоре понадобится, когда мы будем обсуждать движение сквозь среду и аберрацию. Как и Аксиомы 1-6, она очень простая, можно сказать, очевидная. Но поскольку ошибки в фундаменте физики, вот именно что, очень простые и очевидные, и, тем не менее, до сих пор их никто не замечал, нам отнюдь не помешает проговаривать подобные очевидные вещи.
Для удобства, мы можем еще ввести понятие «удаленный наблюдатель» – это такой наблюдатель, который находится настолько далеко от объекта своего наблюдения, что ни движение его самого, ни движение объекта наблюдения не приводят к заметному изменению относительных положений наблюдателя и объекта, в частности, угла, под которым наблюдатель видит свой объект. Скажем, все мы являемся удаленными наблюдателями относительно звезд, и если бы еще иметь настолько мощные телескопы, чтобы можно было видеть звезды не как точки, а как протяженные тела, то это было бы идеальным примером и удаленных наблюдателей, и удаленных наблюдаемых тел.
Возьмем группу удаленных наблюдателей, находящихся в разных СО, то есть двигающихся с разными скоростями друг относительно друга, которые в какой-то момент времени окажутся друг рядом с другом, почти в одной точке. Все эти наблюдатели имеют телескопы, настроенные на одно и то же тело (допустим, Спасскую башню) таким образом, что эта башня находится всегда в самом центре поля зрения телескопа. При этом, телескопы в каждой СО очень медленно поворачиваются вслед за башней, подобно тому, как поворачивается телескоп вслед за Луной. Благодаря этому, все наблюдатели будут видеть практически одну и ту же картину (во всяком случае, на протяжении некоторого времени): неподвижную башню в центре поле зрения телескопа.
Аксиома 8: Все тела, среды и их расположение относительно друг друга в фиксированный момент времени выглядят одинаково во всех системах отсчета.
Координаты этих тел в разных системах отсчета отличаются. Но сами тела и среды, их форма, взаимное расположение, выглядят одинаково во всех системах отсчета.
То есть все наблюдатели, с какими скоростями они бы ни двигались, согласятся, что, скажем, деревянный столб, Пизанская башня, идущий мимо нее человек и едущая мимо машина в момент времени t₁ ориентированы в пространстве друг относительно друга совершенно определенным образом. «Мгновенные снимки» этих тел будут выглядеть одинаково во всех системах отсчета (СО), если наблюдатели, движущиеся с разными скоростями, в момент снятия этих снимков оказались очень близко друг к другу, почти в одной точке.
Если на этих снимках столб расположен перпендикулярно поверхности Земли в одной СО, то он будет перпендикулярен ей и во всех других СО. Его размеры будут одинаковы во всех СО. Если соединить прямой линией две точки – одну сверху, А, другую снизу столба, В, то вектор АВ будет выглядеть совершенно одинаково во всех СО. Если Пизанская башня наклонена в одной СО под углом 3° 54' относительно поверхности Земли, то она будет наклонена под тем же углом относительно поверхности Земли и во всех других СО. Расстояния (и вектора) от Пизанской башни до идущего мимо нее человека и едущей мимо машины в момент t₁ будут одинаковы для всех наблюдателей.
Аксиома 8 нам вскоре понадобится, когда мы будем обсуждать движение сквозь среду и аберрацию. Как и Аксиомы 1-6, она очень простая, можно сказать, очевидная. Но поскольку ошибки в фундаменте физики, вот именно что, очень простые и очевидные, и, тем не менее, до сих пор их никто не замечал, нам отнюдь не помешает проговаривать подобные очевидные вещи.
Для удобства, мы можем еще ввести понятие «удаленный наблюдатель» – это такой наблюдатель, который находится настолько далеко от объекта своего наблюдения, что ни движение его самого, ни движение объекта наблюдения не приводят к заметному изменению относительных положений наблюдателя и объекта, в частности, угла, под которым наблюдатель видит свой объект. Скажем, все мы являемся удаленными наблюдателями относительно звезд, и если бы еще иметь настолько мощные телескопы, чтобы можно было видеть звезды не как точки, а как протяженные тела, то это было бы идеальным примером и удаленных наблюдателей, и удаленных наблюдаемых тел.
Возьмем группу удаленных наблюдателей, находящихся в разных СО, то есть двигающихся с разными скоростями друг относительно друга, которые в какой-то момент времени окажутся друг рядом с другом, почти в одной точке. Все эти наблюдатели имеют телескопы, настроенные на одно и то же тело (допустим, Спасскую башню) таким образом, что эта башня находится всегда в самом центре поля зрения телескопа. При этом, телескопы в каждой СО очень медленно поворачиваются вслед за башней, подобно тому, как поворачивается телескоп вслед за Луной. Благодаря этому, все наблюдатели будут видеть практически одну и ту же картину (во всяком случае, на протяжении некоторого времени): неподвижную башню в центре поле зрения телескопа.
Отредактировано: Yuri Rus - 19 июн 2013 19:15:32
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Картины в масле
На исходные понятия физики, что неудивительно, наложили свой отпечаток наши органы чувств (особенно зрение), среда, в которой мы обитаем (прежде всего, воздух, и в меньшей степени – вода), наши размеры (порядка метра). При этом, и воздух, и вода – достаточно прозрачные среды, а кроме того, они практически не сохраняют следов тела, которое движется сквозь них (за отдельными и непринципиальными исключениями, скажем, инверсионный след после самолета). Если бы мы жили в вакууме, эта особенность нашего восприятия среды была бы выражена еще сильнее. Следствием этого восприятия и является Принцип Относительности Движения Галилея.
Для иллюстрации этого принципа, часто приводится пример пассажира, сидящего в движущемся поезде, и человека, стоящего на перроне. Если поезд движется с постоянной скоростью, то и человек на перроне, и пассажир в поезде оба имеют равные права сказать, что неподвижен именно он, а движется другой человек. Сам Галилей в одной из своих книг приводил несколько более сложный пример (воспроизвожу по памяти, читал эту книгу почти 30 лет назад). В этом примере, корабль двигался с постоянной скоростью вдоль берега, на котором стояли зрители. На мачте корабля сидел матрос, держащий в руках ядро. Когда матрос отпустил ядро, то оно упало возле основания мачты. При этом, для наблюдателей на корабле, это ядро двигалось вертикально вниз по прямой линии, с ускорением. Для наблюдателей на берегу, поскольку относительно них корабль (и ядро вместе с ним) двигался горизонтально с постоянной скоростью, траектория ядра описала параболу.
Что здесь не так? То, что и в первом примере с поездом, и во втором с кораблем, полностью пренебрегается движением пассажира или ядра относительно среды – воздуха. Но давайте будем использовать другую среду: такую, в которой следы остаются. В качестве такой среды выберем сливочное масло при комнатной температуре – мягкое, но держащее форму и сохраняющее следы (треки) тел, которые прошли сквозь него.
Представим себе планету, поверхность которой покрыта сливочным маслом, сквозь которое двигаются аборигены данной планеты. Зрение аборигенов хорошо приспособлено к этой среде, она для них достаточно прозрачна, но при этом они хорошо видят все следы тел, ранее прошедших сквозь масло. Однажды аборигены решили поставить эксперимент с поездом, для проверки Принципа Относительности Движения местного ученого Лео Лея. В первом эксперименте, один наблюдатель стоял на платформе, покрытой маслом, а второй наблюдатель ехал на открытой дрезине по путям, покрытым тем же маслом. Первый наблюдатель отметил, что масло вокруг него неподвижно, а вот второй наблюдатель с большой скоростью движется сквозь масло, оставляя после себя заметный след (трек). Второй наблюдатель, что характерно, отметит то же самое: что поток масла весьма чувствительно бьет ему в лицо, он заметит свой след в масле позади себя, и отметит в то же время, что первый наблюдатель не двигается относительно масла. Заметьте, в данном эксперименте не имеет никакого значения, двигаются ли наблюдатели относительно Земли, платформы, деревьев и т.д. – только относительно среды (масла).
Что касается корабля Галилея, поставим эксперимент с маслом и ядром все-таки на Земле. Поставим два эксперимента: в первом, большой брусок мягкого масла толщиной 3 метра лежит на палубе корабля и двигается вместе с ним относительно берега. На мачте сидит матрос, который держит в руках маленькое урановое ядро (его плотность настолько высока, что масло почти не окажет сопротивления его движению) и в момент времени t₁ отпускает его над поверхностью масла. На большом расстоянии от корабля, у нас имеются два удаленных наблюдателя, один неподвижен относительно берега, другой – относительно корабля (то есть двигается с той же скоростью в том же направлении). Телескопы этих наблюдателей настроены на брусок масла (то есть телескоп наблюдателя, неподвижного относительно берега, слегка поворачивается вслед за движением бруска, так что брусок на протяжении достаточно длительного времени находится в центре поля зрения телескопа). Что увидят эти наблюдатели?
Оба наблюдателя увидят одну и ту же картину: ядро двигается сквозь масло – относительно масла – вертикально вниз, с ускорением. В момент времени t₂ ядро достигнет дна бруска масла (то есть палубы). Трек, оставленный ядром в масле, будет прямой (толстая красная линия в желтом масле).
Обратите внимание – этот трек является не воображаемой траекторией, а вполне материальным объектом. Он объективно существует. На него можно посмотреть, его можно измерить, сфотографировать. Он настолько же материален, как столб или Пизанская башня. И он подчиняется Аксиоме 8 – он выглядит одинаково во всех системах отсчета.
Траектории же физики, по сравнению с такими треками в масле, являются воображаемыми, а не реальными. Допустим, некий наблюдатель установил кинокамеру на свой телескоп и зафиксировал движение ядра сквозь масло. Если его телескоп настроен не на брусок масла, а на какой-то объект на берегу, то на кадрах кинопленки корабль будет двигаться слева направо. Потом этот фильм можно посмотреть на мониторе компьютера - покадрово. Зритель этого фильма может наложить на экран телевизора лист бумаги и отметить на нем последовательные положения ядра при его движении влево и вниз, а затем соединить полученные точки кривой линией. Если для простоты мы не будем учитывать сопротивления масла, то полученная траектория, действительно, будет параболой.
Во втором эксперименте, брусок масла лежит на пирсе, вплотную к которому проходит корабль, и матрос отпускает урановое ядро над поверхностью этого масла. Что теперь увидят удаленные наблюдатели, чьи телескопы настроены на брусок масла (а не на корабль, потому что нас интересует именно трек, оставленный ядром в масле)?
Оба наблюдателя согласятся, что теперь трек, оставленный ядром в масле, является не прямой линией, а параболой (если не учитывать сопротивления масла).
Этот трек также не воображаемый, а вполне материальный; он объективно существует и подчиняется Аксиоме 8 (выглядит одинаково во всех системах отсчета).
На самом деле, и движение пассажира поезда, и полет уранового ядра с мачты сквозь масло иллюстрируют суть Дуализма Движения не самым лучшим образом. Эти примеры не очень информативны, я разобрал их только потому, что именно они обычно приводятся в учебниках по физике для объяснения Принципа Относительности Движения Галилея. Чтобы показать, что важнейшей, определяющей характеристикой движения является именно движение per medium (сквозь среду), а не движение ad aspicientis (к наблюдателю), нам понадобятся несколько более сложные примеры.
Примечание: текст слегка отредактирован - введен термин "трек" и добавлено сравнение его с воображаемой траекторией.
На исходные понятия физики, что неудивительно, наложили свой отпечаток наши органы чувств (особенно зрение), среда, в которой мы обитаем (прежде всего, воздух, и в меньшей степени – вода), наши размеры (порядка метра). При этом, и воздух, и вода – достаточно прозрачные среды, а кроме того, они практически не сохраняют следов тела, которое движется сквозь них (за отдельными и непринципиальными исключениями, скажем, инверсионный след после самолета). Если бы мы жили в вакууме, эта особенность нашего восприятия среды была бы выражена еще сильнее. Следствием этого восприятия и является Принцип Относительности Движения Галилея.
Для иллюстрации этого принципа, часто приводится пример пассажира, сидящего в движущемся поезде, и человека, стоящего на перроне. Если поезд движется с постоянной скоростью, то и человек на перроне, и пассажир в поезде оба имеют равные права сказать, что неподвижен именно он, а движется другой человек. Сам Галилей в одной из своих книг приводил несколько более сложный пример (воспроизвожу по памяти, читал эту книгу почти 30 лет назад). В этом примере, корабль двигался с постоянной скоростью вдоль берега, на котором стояли зрители. На мачте корабля сидел матрос, держащий в руках ядро. Когда матрос отпустил ядро, то оно упало возле основания мачты. При этом, для наблюдателей на корабле, это ядро двигалось вертикально вниз по прямой линии, с ускорением. Для наблюдателей на берегу, поскольку относительно них корабль (и ядро вместе с ним) двигался горизонтально с постоянной скоростью, траектория ядра описала параболу.
Что здесь не так? То, что и в первом примере с поездом, и во втором с кораблем, полностью пренебрегается движением пассажира или ядра относительно среды – воздуха. Но давайте будем использовать другую среду: такую, в которой следы остаются. В качестве такой среды выберем сливочное масло при комнатной температуре – мягкое, но держащее форму и сохраняющее следы (треки) тел, которые прошли сквозь него.
Представим себе планету, поверхность которой покрыта сливочным маслом, сквозь которое двигаются аборигены данной планеты. Зрение аборигенов хорошо приспособлено к этой среде, она для них достаточно прозрачна, но при этом они хорошо видят все следы тел, ранее прошедших сквозь масло. Однажды аборигены решили поставить эксперимент с поездом, для проверки Принципа Относительности Движения местного ученого Лео Лея. В первом эксперименте, один наблюдатель стоял на платформе, покрытой маслом, а второй наблюдатель ехал на открытой дрезине по путям, покрытым тем же маслом. Первый наблюдатель отметил, что масло вокруг него неподвижно, а вот второй наблюдатель с большой скоростью движется сквозь масло, оставляя после себя заметный след (трек). Второй наблюдатель, что характерно, отметит то же самое: что поток масла весьма чувствительно бьет ему в лицо, он заметит свой след в масле позади себя, и отметит в то же время, что первый наблюдатель не двигается относительно масла. Заметьте, в данном эксперименте не имеет никакого значения, двигаются ли наблюдатели относительно Земли, платформы, деревьев и т.д. – только относительно среды (масла).
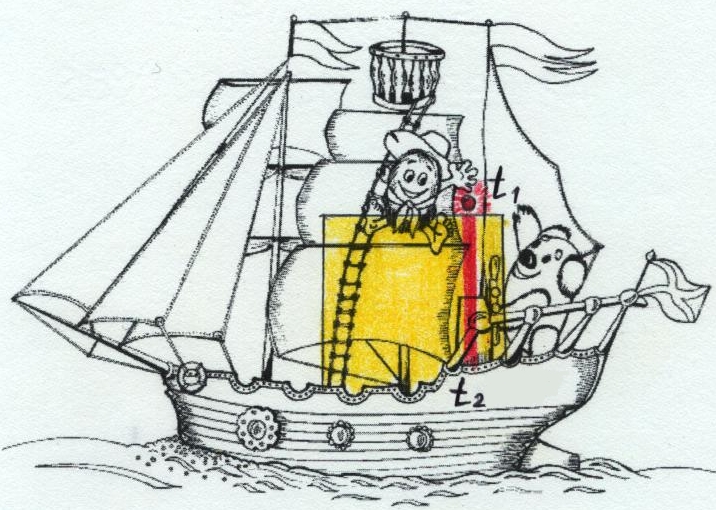
Что касается корабля Галилея, поставим эксперимент с маслом и ядром все-таки на Земле. Поставим два эксперимента: в первом, большой брусок мягкого масла толщиной 3 метра лежит на палубе корабля и двигается вместе с ним относительно берега. На мачте сидит матрос, который держит в руках маленькое урановое ядро (его плотность настолько высока, что масло почти не окажет сопротивления его движению) и в момент времени t₁ отпускает его над поверхностью масла. На большом расстоянии от корабля, у нас имеются два удаленных наблюдателя, один неподвижен относительно берега, другой – относительно корабля (то есть двигается с той же скоростью в том же направлении). Телескопы этих наблюдателей настроены на брусок масла (то есть телескоп наблюдателя, неподвижного относительно берега, слегка поворачивается вслед за движением бруска, так что брусок на протяжении достаточно длительного времени находится в центре поля зрения телескопа). Что увидят эти наблюдатели?
Оба наблюдателя увидят одну и ту же картину: ядро двигается сквозь масло – относительно масла – вертикально вниз, с ускорением. В момент времени t₂ ядро достигнет дна бруска масла (то есть палубы). Трек, оставленный ядром в масле, будет прямой (толстая красная линия в желтом масле).
Обратите внимание – этот трек является не воображаемой траекторией, а вполне материальным объектом. Он объективно существует. На него можно посмотреть, его можно измерить, сфотографировать. Он настолько же материален, как столб или Пизанская башня. И он подчиняется Аксиоме 8 – он выглядит одинаково во всех системах отсчета.
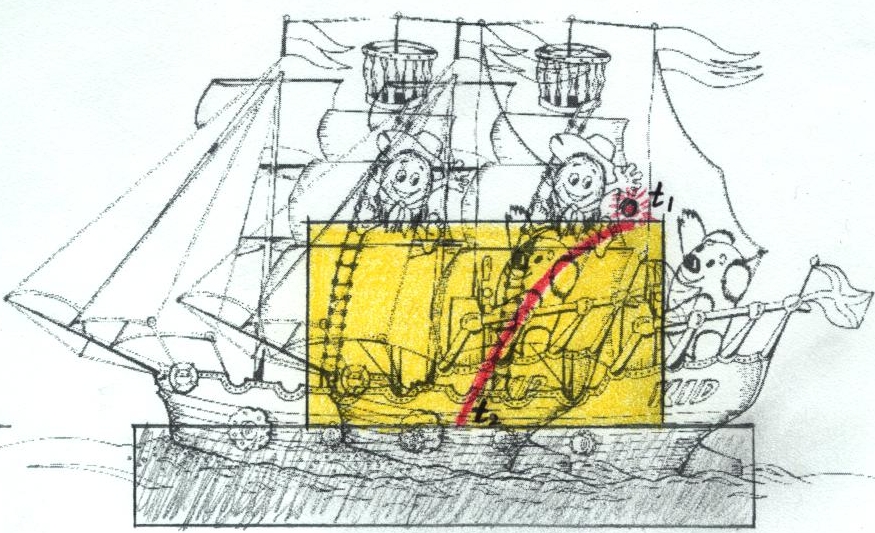
Траектории же физики, по сравнению с такими треками в масле, являются воображаемыми, а не реальными. Допустим, некий наблюдатель установил кинокамеру на свой телескоп и зафиксировал движение ядра сквозь масло. Если его телескоп настроен не на брусок масла, а на какой-то объект на берегу, то на кадрах кинопленки корабль будет двигаться слева направо. Потом этот фильм можно посмотреть на мониторе компьютера - покадрово. Зритель этого фильма может наложить на экран телевизора лист бумаги и отметить на нем последовательные положения ядра при его движении влево и вниз, а затем соединить полученные точки кривой линией. Если для простоты мы не будем учитывать сопротивления масла, то полученная траектория, действительно, будет параболой.
Во втором эксперименте, брусок масла лежит на пирсе, вплотную к которому проходит корабль, и матрос отпускает урановое ядро над поверхностью этого масла. Что теперь увидят удаленные наблюдатели, чьи телескопы настроены на брусок масла (а не на корабль, потому что нас интересует именно трек, оставленный ядром в масле)?
Оба наблюдателя согласятся, что теперь трек, оставленный ядром в масле, является не прямой линией, а параболой (если не учитывать сопротивления масла).
Этот трек также не воображаемый, а вполне материальный; он объективно существует и подчиняется Аксиоме 8 (выглядит одинаково во всех системах отсчета).
На самом деле, и движение пассажира поезда, и полет уранового ядра с мачты сквозь масло иллюстрируют суть Дуализма Движения не самым лучшим образом. Эти примеры не очень информативны, я разобрал их только потому, что именно они обычно приводятся в учебниках по физике для объяснения Принципа Относительности Движения Галилея. Чтобы показать, что важнейшей, определяющей характеристикой движения является именно движение per medium (сквозь среду), а не движение ad aspicientis (к наблюдателю), нам понадобятся несколько более сложные примеры.
Примечание: текст слегка отредактирован - введен термин "трек" и добавлено сравнение его с воображаемой траекторией.
Отредактировано: Yuri Rus - 02 дек 2019 13:57:15
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Картины в масле 2
Поставим еще несколько экспериментов с движением объектов в масле. Правда, сейчас влияние гравитации нам не нужно, будет только отвлекать. Можно поставить эксперименты на орбите, в невесомости (когда-нибудь, обязательно).
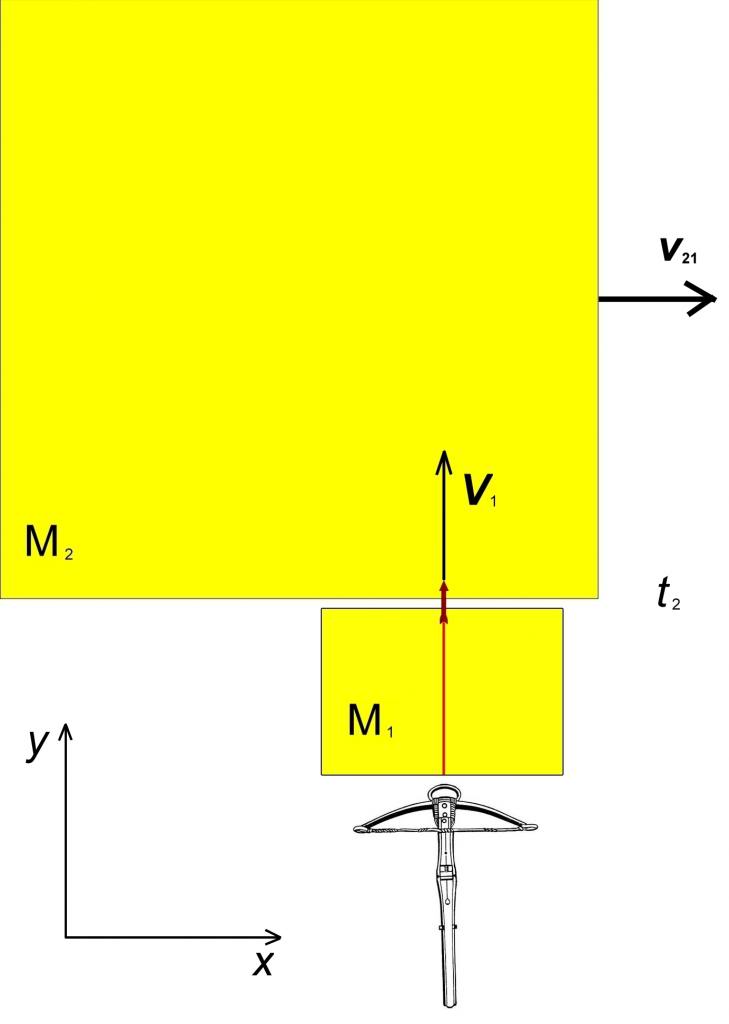
Итак, космонавт Вася держит в руках дробовик с низкой кучностью (то есть дробь вылетает из него довольно широким пучком). Рядом с ним находится брусок мягкого сливочного масла М₁, неподвижный относительно Васи. Дробовик направлен в сторону этого бруска (по оси y). С другой стороны бруска, вплотную к нему по оси х со скоростью v₂₁ двигается очень большой брусок масла М₂. В момент времени t₁, как раз когда бруски поровнялись, Вася стреляет. Дробинки, которые летят под разными углами, проходят сначала брусок М₁ и входят в брусок М₂. Теперь мы не будем пренебрегать сопротивлением масла, так что все дробинки в конце концов остановятся (относительно М₂). В направлении оси z (сверху), имеются несколько удаленных наблюдателей (двигающихся с разными скоростями) с телескопами. Что они увидят?
Пусть часть телескопов настроена на брусок М₁. В эти телескопы все наблюдатели увидят, как дробь двигается от дробовика сквозь масло М₁. В момент времени t₂ дробь достигнет конца бруска М₁ и выйдет из него. Если наблюдатели в этот момент сделают мгновенные снимки системы, то все они увидят следующее:
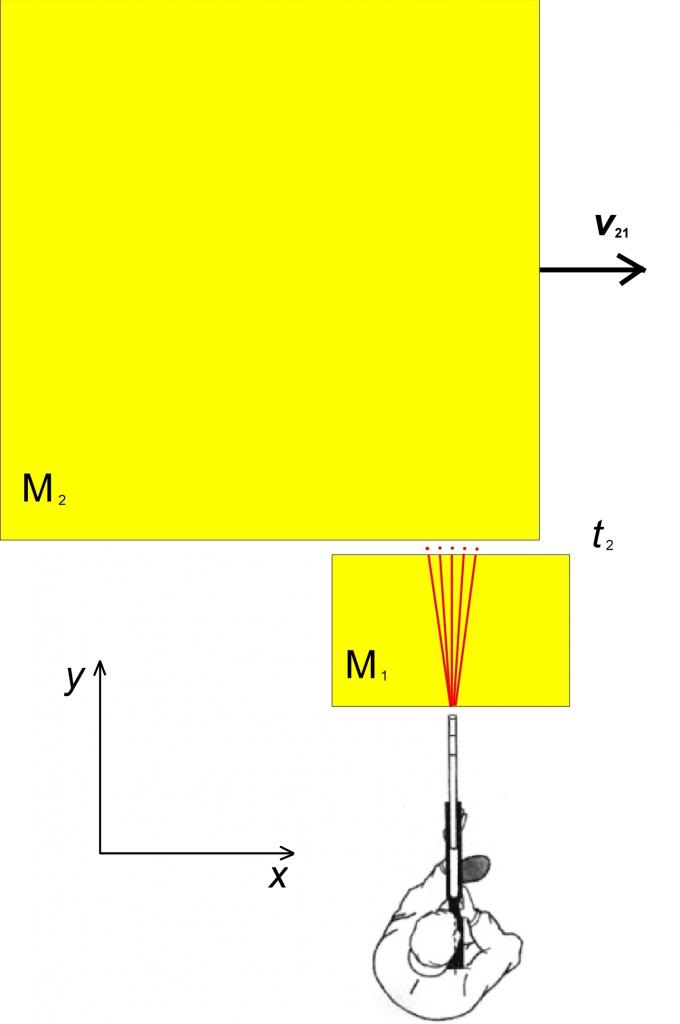
Каждая дробинка оставила трек в масле М₁ – прямую линию (веер красных линий от ствола дробовика). Сами дробинки «висят» в воздухе между М₁ и М₂.
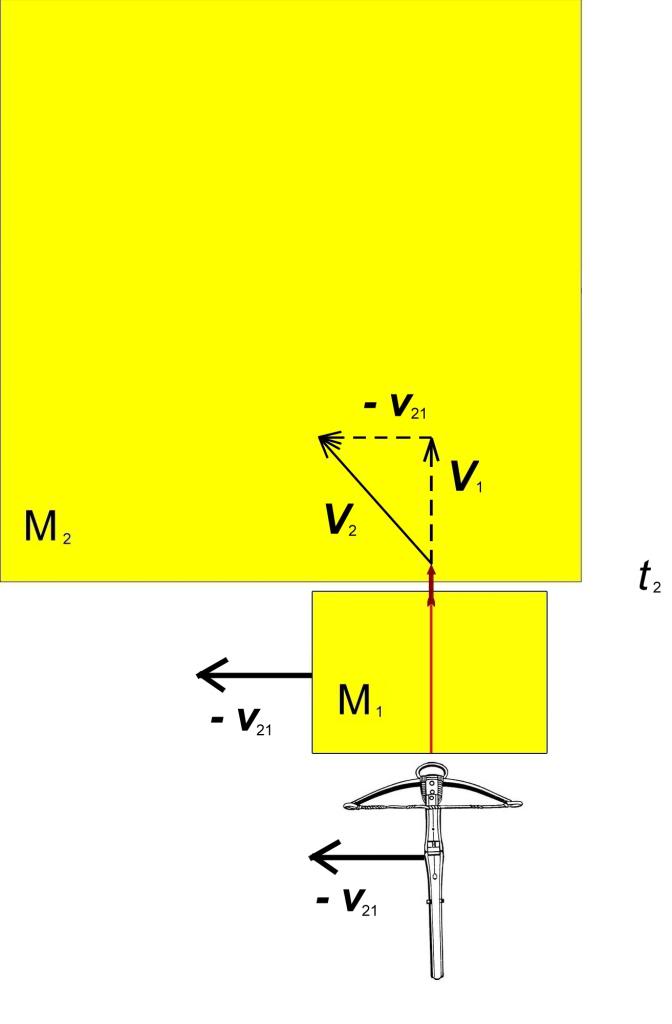
Далее дробинки входят в брусок масла М₂ и продолжают движение уже в нем, пока в момент времени t₃ не остановятся из-за сопротивления масла. Пусть другая часть телескопов была заранее настроена на брусок М₂. Что увидят наблюдатели в эти телескопы в момент t₃? Поскольку для них брусок М₂ неподвижно находится в центре поля зрения телескопа, они считают, что это брусок М₁ и стрелок Вася двигаются влево со скоростью –v₂₁. За время t₃ – t₂, которое понадобилось на замедление дроби до полной остановки, брусок М₁ и стрелок успеют сместиться на некоторое расстояние:
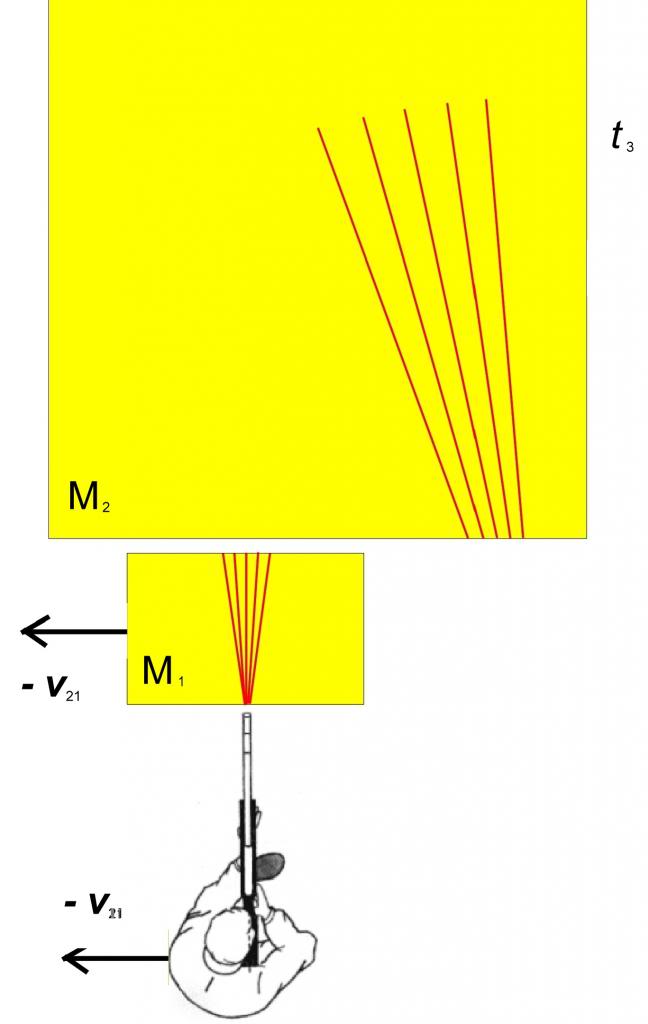
Что здесь важно? Во-первых, при переходе из М₁ в М₂, двигающийся относительно М₁ со скоростью v₂₁, скорость per medium дробинки резко меняется. Пусть скорость дробинки относительно бруска М₁ (с внутренней системой координат X₁Y₁ Z₁) на выходе из М₁ была равна V₁(VX₁, VY₁, VZ₁). Тогда при входе дробинки в М₂ ее скорость относительно внутренней системы координат М₂, то есть X₂Y₂ Z₂, будет равна
V₂ (VX₂, VY₂, VZ₂) = V₁(VX₁, VY₁, VZ₁) – v₂₁
Это тот самый Принцип Аберрации Движения, о котором я уже упоминал и о котором мы будем еще очень много говорить. Сейчас мы рассматриваем этот принцип в рамках механики, но наиболее важен он для распространения волн и сил. Этот принцип, ни много ни мало, позволит нам построить новую электродинамику. Принципиально отличную от электродинамики Максвелла. При этом, очень простую и наглядную.
Для материальных тел, этот принцип формулируется следующим образом:
Аксиома 9 (Принцип Аберрации Скорости Движения Тел): При переходе из среды 1 в среду 2, двигающуюся относительно среды 1 со скоростью v₂₁, скорость тела в среде 2 будет равна скорости этого тела в среде 1 минус скорость v₂₁.
Во-вторых, обратите внимание, треки (следы в масле) дробинок в бруске М₂ (как, впрочем, и в бруске М₁), это прямые линии. Реальные, материальные, объективно существующие прямые линии, подчиняющиеся Аксиоме 8, то есть выглядящие одинаково для всех наблюдателей во всех системах отсчета.
В отличие от треков русики, физику интересуют «воображаемые» траектории дробинок (о том, почему я называю траектории воображаемыми, см. мое предыдущее сообщение) в координатах СО неких наблюдателей, двигающихся с разными скоростями. Скажем, траектории движения дробинок с позиции наблюдателя, находящегося в одной СО с Васей, но расположенного над ним, должны выглядеть вот так:
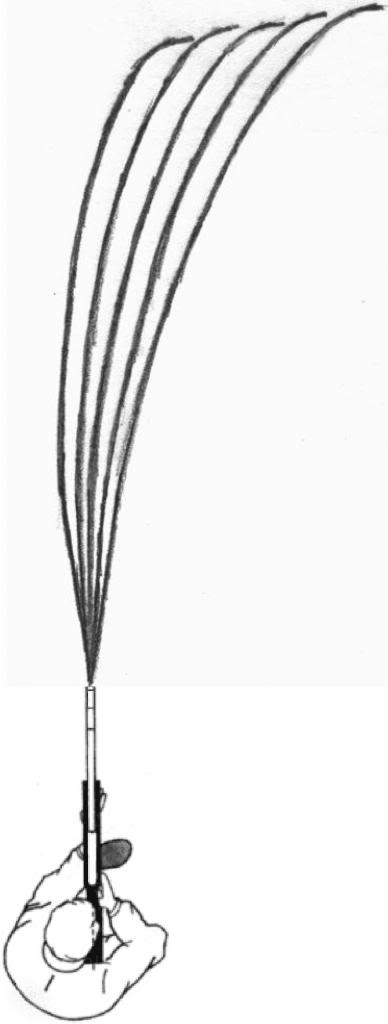
Это отнюдь не прямые линии, а кривые, поскольку из-за сопротивления масла дробинки двигались с замедлением, а кроме того, когда они двигались сквозь брусок М₂, на них слева дул «масляный ветер». Собственно, воображаемые траектории будут кривыми во всех СО.
Треки же русики, еще раз, – прямые линии. Их «прямизна» является следствием того факта, что при движении дробинки сквозь брусок масла система отсчета, связанная с этим бруском, является выделенной, поскольку силы, действующие на дробинку полностью определяются именно ее взаимодействием со средой. Конечно, если бы на дробинку действовали дополнительные силы, скажем, сила тяжести или тяга ракетных двигателей, то ее трек был бы совсем не прямым. Но для того мы и выбрали такой упрощенный вариант, чтобы вычленить главное. А главным является то, что важнейшей характеристикой движения тела является именно его движение сквозь среду (per medium). Движение же тела относительно некой системы отсчета (ad aspicientis) является, в этом смысле, второстепенной характеристикой. Хотя для полного описания движения тела нужны оба вида движения.
Попробую объяснить значение движения тела сквозь среду другими словами. Давайте представим себе, что дробинки у нас живые (как пассажир, который ехал на открытой дрезине сквозь масло). То есть они могут чувствовать, какие силы на них действуют. Или они неживые, но их поверхность утыкана нанодатчиками давления, которые позволяют нам измерить силы, действующие на них со стороны среды. Как дробинки будут «чувствовать» ветер? Очень просто – среда оказывает давление на всю поверхность дробинки; если давление со всех сторон одинаково, ветра нет. Если давление с определенной стороны больше, чем с противоположной, то ветер дует с того направления, где давление максимально.
Если дробинка двигается сквозь среду с какой-то скоростью, то для нее это эквивалентно встречному ветру с той же скоростью, но противоположного направления. С точки зрения дробинки, откуда, с какого направления на нее дует встречный ветер, когда она двигается сквозь среду М₁ по оси y? Ветер дует на нее также по оси y, но в противоположном направлении. Элементарно, Ватсон. Теперь дробинка входит в среду М₂. Откуда ветер дует теперь? А как раз с направления, противоположного вектору ее скорости относительно внутренней системы координат М₂:
V₂(VX₂, VY₂, VZ₂) = V₁(VX₁, VY₁, VZ₁) – v₂₁
То есть дробинка «чувствует» встречный ветер именно с того направления, откуда он должен дуть в среде отсчета бруска М₂. Но «чувства» дробинки – это лирика. А какая (грубая, материальная) сила действует на дробинку со стороны среды М₂? Сила сопротивления, то есть. В каком направлении?
В том же самом, что и встречный ветер. Поскольку градиент давления – это сила, а направление, откуда на дробинку дует встречный ветер, мы определяем тоже как градиент давления. А согласно физике, сила, между прочим, инвариантна относительно преобразований Галилея – вектор силы одинаков в любой инерциальной системе отсчета. Хотя преобразования Галилея и инерциальные системы отсчета не играют в русике такую же роль, как в физике, русика здесь согласна с физикой.
Поставим еще несколько экспериментов с движением объектов в масле. Правда, сейчас влияние гравитации нам не нужно, будет только отвлекать. Можно поставить эксперименты на орбите, в невесомости (когда-нибудь, обязательно).
Итак, космонавт Вася держит в руках дробовик с низкой кучностью (то есть дробь вылетает из него довольно широким пучком). Рядом с ним находится брусок мягкого сливочного масла М₁, неподвижный относительно Васи. Дробовик направлен в сторону этого бруска (по оси y). С другой стороны бруска, вплотную к нему по оси х со скоростью v₂₁ двигается очень большой брусок масла М₂. В момент времени t₁, как раз когда бруски поровнялись, Вася стреляет. Дробинки, которые летят под разными углами, проходят сначала брусок М₁ и входят в брусок М₂. Теперь мы не будем пренебрегать сопротивлением масла, так что все дробинки в конце концов остановятся (относительно М₂). В направлении оси z (сверху), имеются несколько удаленных наблюдателей (двигающихся с разными скоростями) с телескопами. Что они увидят?
Пусть часть телескопов настроена на брусок М₁. В эти телескопы все наблюдатели увидят, как дробь двигается от дробовика сквозь масло М₁. В момент времени t₂ дробь достигнет конца бруска М₁ и выйдет из него. Если наблюдатели в этот момент сделают мгновенные снимки системы, то все они увидят следующее:
Каждая дробинка оставила трек в масле М₁ – прямую линию (веер красных линий от ствола дробовика). Сами дробинки «висят» в воздухе между М₁ и М₂.
Далее дробинки входят в брусок масла М₂ и продолжают движение уже в нем, пока в момент времени t₃ не остановятся из-за сопротивления масла. Пусть другая часть телескопов была заранее настроена на брусок М₂. Что увидят наблюдатели в эти телескопы в момент t₃? Поскольку для них брусок М₂ неподвижно находится в центре поля зрения телескопа, они считают, что это брусок М₁ и стрелок Вася двигаются влево со скоростью –v₂₁. За время t₃ – t₂, которое понадобилось на замедление дроби до полной остановки, брусок М₁ и стрелок успеют сместиться на некоторое расстояние:
Что здесь важно? Во-первых, при переходе из М₁ в М₂, двигающийся относительно М₁ со скоростью v₂₁, скорость per medium дробинки резко меняется. Пусть скорость дробинки относительно бруска М₁ (с внутренней системой координат X₁Y₁ Z₁) на выходе из М₁ была равна V₁(VX₁, VY₁, VZ₁). Тогда при входе дробинки в М₂ ее скорость относительно внутренней системы координат М₂, то есть X₂Y₂ Z₂, будет равна
V₂ (VX₂, VY₂, VZ₂) = V₁(VX₁, VY₁, VZ₁) – v₂₁
Это тот самый Принцип Аберрации Движения, о котором я уже упоминал и о котором мы будем еще очень много говорить. Сейчас мы рассматриваем этот принцип в рамках механики, но наиболее важен он для распространения волн и сил. Этот принцип, ни много ни мало, позволит нам построить новую электродинамику. Принципиально отличную от электродинамики Максвелла. При этом, очень простую и наглядную.
Для материальных тел, этот принцип формулируется следующим образом:
Аксиома 9 (Принцип Аберрации Скорости Движения Тел): При переходе из среды 1 в среду 2, двигающуюся относительно среды 1 со скоростью v₂₁, скорость тела в среде 2 будет равна скорости этого тела в среде 1 минус скорость v₂₁.
Во-вторых, обратите внимание, треки (следы в масле) дробинок в бруске М₂ (как, впрочем, и в бруске М₁), это прямые линии. Реальные, материальные, объективно существующие прямые линии, подчиняющиеся Аксиоме 8, то есть выглядящие одинаково для всех наблюдателей во всех системах отсчета.
В отличие от треков русики, физику интересуют «воображаемые» траектории дробинок (о том, почему я называю траектории воображаемыми, см. мое предыдущее сообщение) в координатах СО неких наблюдателей, двигающихся с разными скоростями. Скажем, траектории движения дробинок с позиции наблюдателя, находящегося в одной СО с Васей, но расположенного над ним, должны выглядеть вот так:
Это отнюдь не прямые линии, а кривые, поскольку из-за сопротивления масла дробинки двигались с замедлением, а кроме того, когда они двигались сквозь брусок М₂, на них слева дул «масляный ветер». Собственно, воображаемые траектории будут кривыми во всех СО.
Треки же русики, еще раз, – прямые линии. Их «прямизна» является следствием того факта, что при движении дробинки сквозь брусок масла система отсчета, связанная с этим бруском, является выделенной, поскольку силы, действующие на дробинку полностью определяются именно ее взаимодействием со средой. Конечно, если бы на дробинку действовали дополнительные силы, скажем, сила тяжести или тяга ракетных двигателей, то ее трек был бы совсем не прямым. Но для того мы и выбрали такой упрощенный вариант, чтобы вычленить главное. А главным является то, что важнейшей характеристикой движения тела является именно его движение сквозь среду (per medium). Движение же тела относительно некой системы отсчета (ad aspicientis) является, в этом смысле, второстепенной характеристикой. Хотя для полного описания движения тела нужны оба вида движения.
Попробую объяснить значение движения тела сквозь среду другими словами. Давайте представим себе, что дробинки у нас живые (как пассажир, который ехал на открытой дрезине сквозь масло). То есть они могут чувствовать, какие силы на них действуют. Или они неживые, но их поверхность утыкана нанодатчиками давления, которые позволяют нам измерить силы, действующие на них со стороны среды. Как дробинки будут «чувствовать» ветер? Очень просто – среда оказывает давление на всю поверхность дробинки; если давление со всех сторон одинаково, ветра нет. Если давление с определенной стороны больше, чем с противоположной, то ветер дует с того направления, где давление максимально.
Если дробинка двигается сквозь среду с какой-то скоростью, то для нее это эквивалентно встречному ветру с той же скоростью, но противоположного направления. С точки зрения дробинки, откуда, с какого направления на нее дует встречный ветер, когда она двигается сквозь среду М₁ по оси y? Ветер дует на нее также по оси y, но в противоположном направлении. Элементарно, Ватсон. Теперь дробинка входит в среду М₂. Откуда ветер дует теперь? А как раз с направления, противоположного вектору ее скорости относительно внутренней системы координат М₂:
V₂(VX₂, VY₂, VZ₂) = V₁(VX₁, VY₁, VZ₁) – v₂₁
То есть дробинка «чувствует» встречный ветер именно с того направления, откуда он должен дуть в среде отсчета бруска М₂. Но «чувства» дробинки – это лирика. А какая (грубая, материальная) сила действует на дробинку со стороны среды М₂? Сила сопротивления, то есть. В каком направлении?
В том же самом, что и встречный ветер. Поскольку градиент давления – это сила, а направление, откуда на дробинку дует встречный ветер, мы определяем тоже как градиент давления. А согласно физике, сила, между прочим, инвариантна относительно преобразований Галилея – вектор силы одинаков в любой инерциальной системе отсчета. Хотя преобразования Галилея и инерциальные системы отсчета не играют в русике такую же роль, как в физике, русика здесь согласна с физикой.
Отредактировано: Yuri Rus - 02 дек 2019 13:59:57
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Картины в масле 3
Дробинки – маленькие и круглые, практически материальные точки. Для следующего эксперимента выберем арбалет с продолговатыми стрелами (болтами). Диспозиция точно такая же: космонавт Вася стоит рядом с бруском масла М₁, мимо которого двигается брусок М₂ и стреляет в сторону М₁ в момент времени t₁.
В момент времени t₂, болт достигает конца бруска М₁ и входит в брусок М₂. На следующем рисунке изображена внутренняя скорость болта V₁(VX₁, VY₁, VZ₁) в среде отсчета М₁:
Болт – это темно-красная стрелка. Отметим, что согласно Аксиоме 8 в момент t₂ и болт, и оба бруска будут выглядеть одинаково для всех наблюдателей. То есть болт будет направлен по оси y и относительно среды отсчета М₁, и относительно среды отсчета М₂.
Внутренняя скорость болта относительно среды отсчета М₂ в момент его входа в М₂ станет равна
V₂ (VX₂, VY₂, VZ₂) = V₁(VX₁, VY₁, VZ₁) – v₂₁
То есть болт войдет в среду М₂ не в направлении оси y, как он двигался сквозь среду М₁, а под углом к ней (вектор V₂):
Обратите внимание, болт будет двигаться относительно среды М₂ не таким, аэродинамически выгодным способом:
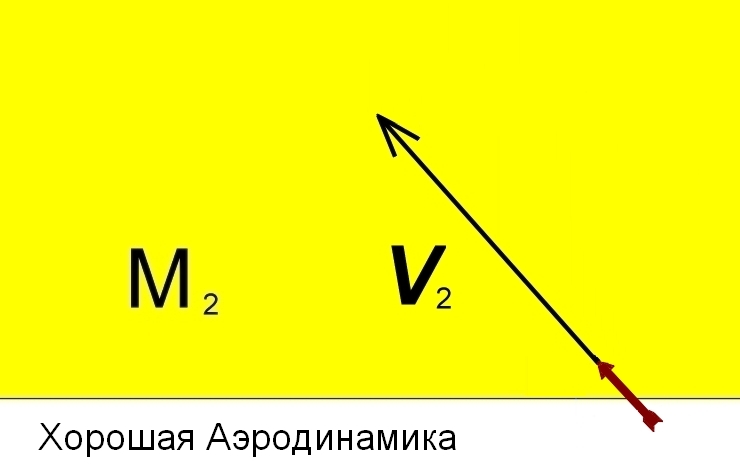
А вот так (боком):
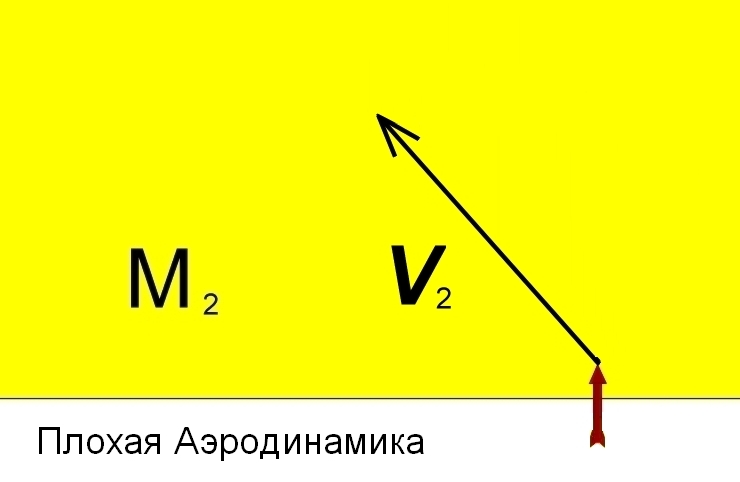
То есть на острие болта будет действовать сила в направлении, противоположном вектору V₂, разворачивая его по часовой стрелке, так что болт начнет «кувыркаться». Это еще один пример того, что силы, действующие на тело, определяются именно его движением сквозь среду. Именно это я имел в виду, когда ранее писал, что движение тела (и волны, о чем чуть позже) per medium является абсолютным и объективным, а движение ad aspicientis является относительным и субъективным.
Из этих картин с дробинками и арбалетным болтом в масле можно сделать ряд практических выводов. Их, впрочем, вполне можно сделать и в рамках физики (физика ведь отнюдь не возбраняет переход из одной системы отсчета в другую), но у меня такое впечатление, что далеко не всегда эти выводы применяются на практике.
Например, как должен лететь самолет из пункта А в пункт Б, если между этими пунктами дует боковой ветер? Русика сразу и однозначно говорит, что самолет должен быть развернут в направлении вектора V₂ на рисунке, подписанном «Хорошая Аэродинамика». В реальности же, не скажу всегда, но как правило, судя по моему опыту полетов на самолетах, самолеты при наличии бокового ветра не меняют свою ориентацию в пространстве. Есть ветер, нет ли, но самолет будет ориентирован как на рисунке, подписанном «Плохая Аэродинамика». Только, в отличие от арбалетного болта, самолет может сопротивляться своему развороту ветром, что он и делает, удерживая свою ориентацию в пространстве. А чтобы самолет не сносило ветром и он прилетел именно туда, куда нужно, тяга двигателей будет направлена как раз в направлении вектора V₂. Замечательно – всё время полета в условиях бокового ветра самолет (относительно среды, т.е. движущегося воздуха) летит боком. И расход топлива больше, и нагрузки на самолет такие, что он намного скорее выйдет из строя.
Таких примеров можно привести много, но я предпочитаю перейти наконец к волнам и силам. Потому что наиболее важные приложения Принципа Аберрации я вижу не в механике, а в электродинамике и волновой механике. Я достаточно подробно остановился на примерах применения этого принципа в механике только потому, что здесь его можно объяснить очень просто и наглядно. После такого объяснения, я надеюсь, понять Принцип Аберрации Волн будет намного легче.
Дробинки – маленькие и круглые, практически материальные точки. Для следующего эксперимента выберем арбалет с продолговатыми стрелами (болтами). Диспозиция точно такая же: космонавт Вася стоит рядом с бруском масла М₁, мимо которого двигается брусок М₂ и стреляет в сторону М₁ в момент времени t₁.
В момент времени t₂, болт достигает конца бруска М₁ и входит в брусок М₂. На следующем рисунке изображена внутренняя скорость болта V₁(VX₁, VY₁, VZ₁) в среде отсчета М₁:
Болт – это темно-красная стрелка. Отметим, что согласно Аксиоме 8 в момент t₂ и болт, и оба бруска будут выглядеть одинаково для всех наблюдателей. То есть болт будет направлен по оси y и относительно среды отсчета М₁, и относительно среды отсчета М₂.
Внутренняя скорость болта относительно среды отсчета М₂ в момент его входа в М₂ станет равна
V₂ (VX₂, VY₂, VZ₂) = V₁(VX₁, VY₁, VZ₁) – v₂₁
То есть болт войдет в среду М₂ не в направлении оси y, как он двигался сквозь среду М₁, а под углом к ней (вектор V₂):
Обратите внимание, болт будет двигаться относительно среды М₂ не таким, аэродинамически выгодным способом:
А вот так (боком):
То есть на острие болта будет действовать сила в направлении, противоположном вектору V₂, разворачивая его по часовой стрелке, так что болт начнет «кувыркаться». Это еще один пример того, что силы, действующие на тело, определяются именно его движением сквозь среду. Именно это я имел в виду, когда ранее писал, что движение тела (и волны, о чем чуть позже) per medium является абсолютным и объективным, а движение ad aspicientis является относительным и субъективным.
Из этих картин с дробинками и арбалетным болтом в масле можно сделать ряд практических выводов. Их, впрочем, вполне можно сделать и в рамках физики (физика ведь отнюдь не возбраняет переход из одной системы отсчета в другую), но у меня такое впечатление, что далеко не всегда эти выводы применяются на практике.
Например, как должен лететь самолет из пункта А в пункт Б, если между этими пунктами дует боковой ветер? Русика сразу и однозначно говорит, что самолет должен быть развернут в направлении вектора V₂ на рисунке, подписанном «Хорошая Аэродинамика». В реальности же, не скажу всегда, но как правило, судя по моему опыту полетов на самолетах, самолеты при наличии бокового ветра не меняют свою ориентацию в пространстве. Есть ветер, нет ли, но самолет будет ориентирован как на рисунке, подписанном «Плохая Аэродинамика». Только, в отличие от арбалетного болта, самолет может сопротивляться своему развороту ветром, что он и делает, удерживая свою ориентацию в пространстве. А чтобы самолет не сносило ветром и он прилетел именно туда, куда нужно, тяга двигателей будет направлена как раз в направлении вектора V₂. Замечательно – всё время полета в условиях бокового ветра самолет (относительно среды, т.е. движущегося воздуха) летит боком. И расход топлива больше, и нагрузки на самолет такие, что он намного скорее выйдет из строя.
Таких примеров можно привести много, но я предпочитаю перейти наконец к волнам и силам. Потому что наиболее важные приложения Принципа Аберрации я вижу не в механике, а в электродинамике и волновой механике. Я достаточно подробно остановился на примерах применения этого принципа в механике только потому, что здесь его можно объяснить очень просто и наглядно. После такого объяснения, я надеюсь, понять Принцип Аберрации Волн будет намного легче.
Отредактировано: Yuri Rus - 02 дек 2019 14:03:38
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Лучи Волн
На 2 странице ветки, [url= http://glav.su/forum…#msg961060]в длинном сообщении с цитатами из учебников о выводе волнового уравнения[/url], я писал (ближе к концу):
«Ключевую роль при выводе волнового уравнения играет принцип Д’Аламбера, согласно которому все силы, действующие на некий элемент среды, включая силу инерции, должны уравновешиваться. По сути, принцип Д’Аламбера – это не что иное, как Второй Закон Ньютона. Можно даже сказать, что волновое уравнение - это другая форма записи Второго Закона Ньютона. Именно в этом заключается его физический смысл. Да, волновое уравнение можно получить и другими способами (например, используя принцип Гамильтона), но это не отменяет тот факт, что оно эквивалентно Второму Закону.»
На 3 странице [url= http://glav.su/forum…#msg967385]я писал[/url]:
«Волновое уравнение инвариантно относительно преобразований Галилея. Все члены волнового уравнения должны выглядеть одинаково во всех инерциальных системах отсчета.
Откуда это следует? Ранее я писал, что волновое уравнение выводится из Второго Закона Ньютона и по сути является другой формой записи Второго Закона, эквивалентно ему. Каждый член волнового уравнения представляет собой ту или иную силу. А сила инвариантна относительно преобразований Галилея – вектор силы одинаков в любой инерциальной системе отсчета.»
В двух словах это можно сформулировать так:
Волна = Сила.
Я писал это, еще оставаясь в рамках физики и пользуясь ее понятийным аппаратом (Второй Закон Ньютона, преобразования Галилея, инерциальные системы отсчета). Так вот, в рамках физики, из утверждения, что волновое уравнение инвариантно относительно преобразований Галилея, следует, что и лучи волн должны быть инвариантны во всех системах отсчета.
А что по этому поводу говорит классическая физика? В физике имеется ряд определений лучей, которые вполне согласуются друг с другом для покоящихся систем и покоящихся наблюдателей, но если или наблюдатели, или объекты, сквозь которые проходят лучи, двигаются, то между этими определениями возникают противоречия. Возьмем, например, такое определение:
«Лучи – это линии, перпендикулярные волновым поверхностям (фронтам волн), все точки которых имеют одинаковую фазу» (первое определение физики).
Прекрасное определение, ничего не имею против. Заметьте – линии, перпендикулярные волновым фронтам, ведут себя точно так же, как и силовые линии (которые инвариантны во всех СО). Скажем, сила звукового давления ΔF, действующая на элемент объема ΔxΔyΔz, равна
ΔF = – ∇p ΔxΔyΔz
Градиент давления, по определению, перпендикулярен поверхностям равного давления (то есть волновым фронтам). Все это вполне согласуется с моим утверждением, что лучи волн должны быть инвариантны во всех системах отсчета.
Звуковые волны, к сожалению, не так просто визуализировать, зато это можно сделать с волнами на поверхности воды. Приведу фото реального эксперимента, демонстрирующего эффект Доплера для волн на поверхности воды (из книги Benjamin Crowell, Vibrations and Waves, 1999-2002, стр. 54):
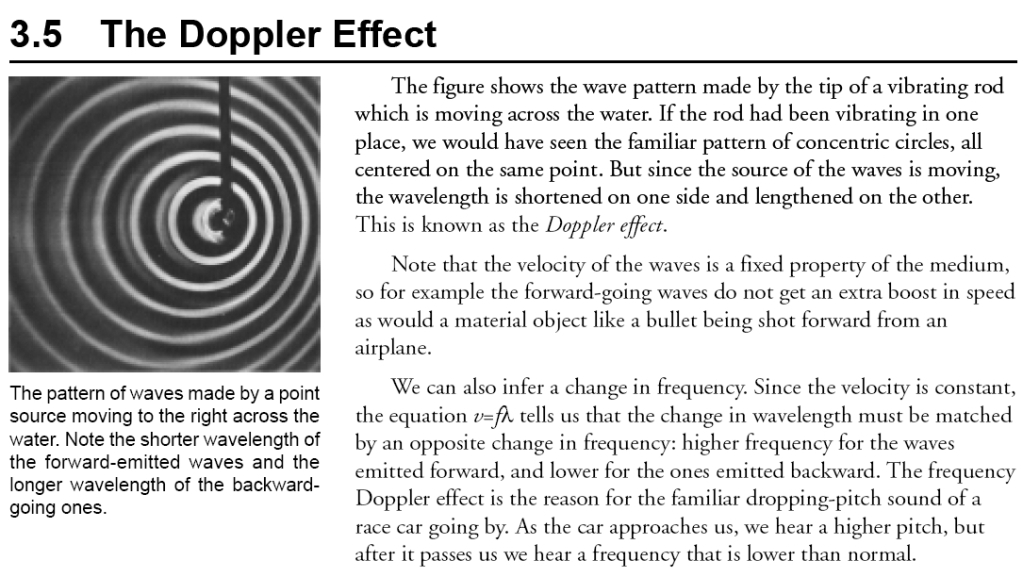
Предположим, что у нас имеется несколько удаленных наблюдателей, двигающихся с разными скоростями по горизонтали, и в определенный момент все они оказались друг рядом с другом, прямо над источником этих волн на воде. В этот момент все наблюдатели делают мгновенные снимки. Думаю, никто не будет возражать против утверждения, что волновые фронты, гребни и впадины между ними на всех этих снимках будут выглядеть одинаково? Волны на поверхности воды являются зримо материальными объектами, ничуть не менее материальными и занимающими вполне определенное место в пространстве, чем столб, Пизанская башня или автомобиль. Безусловно, эти волны подчиняются Аксиоме 8 (все тела, среды и их расположение относительно друг друга в фиксированный момент времени выглядят одинаково во всех системах отсчета).
Это относится не только к волнам на поверхности воды, но ко всем волнам. В частности, волновые фронты звуковых волн тоже должны выглядеть одинаково во всех системах отсчета. Классическая физика, собственно, с этим согласна. Это относится и к световым волнам; но об этом позже, чтобы не залезать в дебри вопроса о том, как мы будем делать «мгновенные снимки» фронтов световых волн, если и сами эти волны, и лучи, попадающие в фотокамеру, двигаются с одинаковой скоростью.
Итак, и физика, и русика согласны, что фронты волн должны выглядеть одинаково во всех системах отсчета. Значит ли это, что и лучи волн будут выглядеть одинаково во всех системах отсчета? Если мы применим данное выше определение «Лучи – это линии, перпендикулярные волновым фронтам», казалось бы, так и должно быть? Внезапно, физика от этого определения лучей отказывается. Оно применяется только для покоящихся систем и покоящихся наблюдателей, а если или среда, или наблюдатель двигается, то положено использовать совсем другое определение лучей:
«Лучи – это линии, вдоль которых переносится световая энергия; их направления совпадают с направлениями векторов групповой скорости» (второе определение физики).
В чем разница с первым определением? В том, что фронты волн и перпендикулярные им линии выглядят одинаково во всех системах отсчета (инвариантны относительно преобразований Галилея), а векторы групповой скорости – нет. Они подчиняются преобразованию Галилея для скоростей, следовательно, совпадающие с ними лучи должны быть направлены по-разному в разных системах отсчета. Важно, что лучи волн более не будут перпендикулярны фронтам волн.
Именно при помощи отклонения лучей волн от нормали к волновым фронтам и объясняет классическая физика явление аберрации света от звезд. Приведу цитату из [url= http://ufn.ru/ru/articles/1953/9/]неплохой статьи[/url] Б.Н. Гиммельфарба «К Объяснению Аберрации Звезд В Теории Относительности», Успехи Физ. Наук, 1953 г. Сентябрь, т. LI, вып. 1, стр. 99–114:
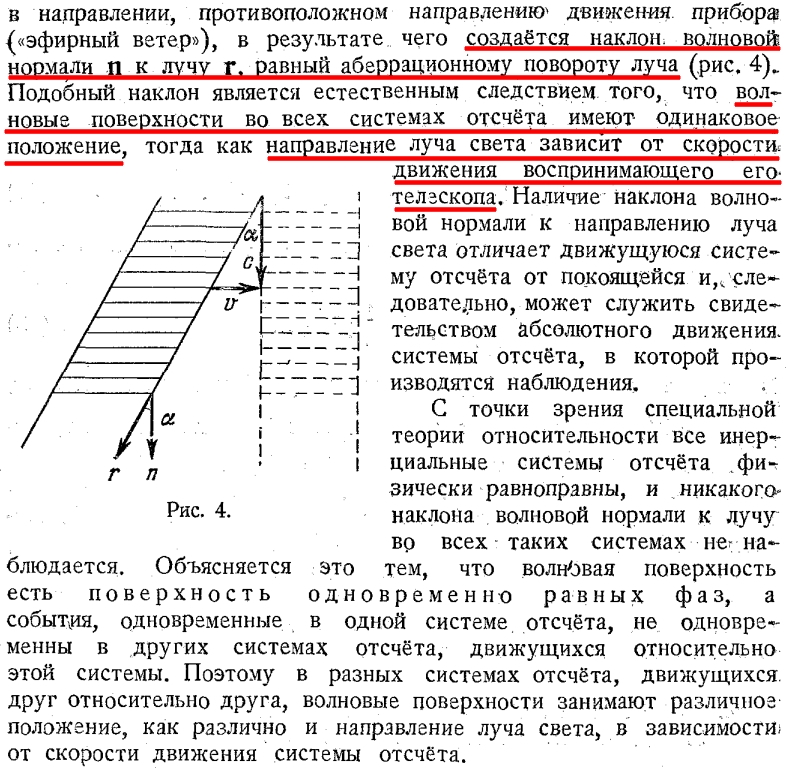
Обратите внимание на подчеркнутое красным – это как раз то, что я писал выше. Волновые поверхности во всех системах отсчета имеют одинаковое положение, но лучи совпадают с нормалью к волновой поверхности только в системе отсчета покоящейся среды. Физика не видит здесь противоречия. Но оно есть. И разрешается оно в русике – благодаря Принципу Дуализма Движения и Принципу Аберрации Волн.
Русика утверждает (постулирует), что любое движение, включая распространение волн, совершается относительно среды и оно объективно. Относительность движения проявляется лишь в движении наблюдателя относительно элемента среды или среды относительно наблюдателя. Что же касается аберрации волн, которая является экспериментальным фактом, то возникает она благодаря тому, что наблюдатель (например, телескоп, в случае световых волн) сам является телом, средой для распространения волн. Впрочем, не будем торопиться. Напомню, что ученые XIX века рассматривали как минимум три варианта взаимоотношений светоносного эфира с веществом: эфир, полностью увлекаемый веществом, неподвижный эфир, не увлекаемый веществом, и эфир, частично увлекаемый веществом. Причем большинство ученых в итоге склонялись к третьему варианту. Несколько позже мы будем рассматривать эти три варианта и сравнивать их следствия между собой. Сейчас же оставим этот вопрос открытым.
Заметим лишь, что именно при переходе световых волн от межзвездного эфира (предположительно неподвижного) в движущийся телескоп происходит аберрация направления лучей света. В межзвездном эфире лучи имели одно направление (перпендикулярное фронтам волн), при переходе в телескоп направление лучей резко меняется. Если среда (эфир) двигается вместе с телескопом, то в телескопе лучи тоже перпендикулярны фронтам волн. Тогда в движущемся телескопе фронты волн (волновые поверхности) имеют другое положение, чем в эфире, они расположены под углом аберрации к волновым фронтам в эфире.
В этом случае, все (удаленные) наблюдатели, с какими скоростями они бы ни двигались, согласятся, что в неподвижном эфире лучи света перпендикулярны фронтам световых волн, а при переходе в движущийся со скоростью v телескоп произойдет аберрация и фронтов волн, и перпендикулярных им лучей. На данном рисунке показаны фронты и лучи волн относительно эфира и относительно телескопа (в обоих случаях, per medium):
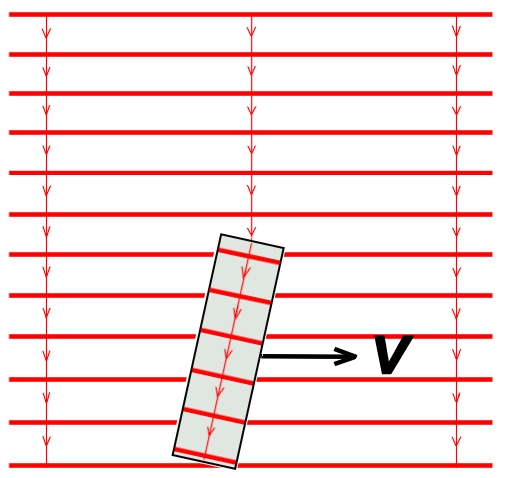
Вообще говоря, это не так, если эфир не увлекается движущимися телами, в частности, телескопом.
Физика считает, что для движущегося наблюдателя лучи света во всей неподвижной среде – в том числе далеко от наблюдателя – не перпендикулярны фронтам волн, а расположены под углом аберрации к нормали. Это является следствием того, что в физике отсутствует Принцип Дуализма Движения, физика не разделяет движение тела или волны относительно элемента среды и движение элемента среды относительно наблюдателя. Физика всегда пользуется только суммой этих двух видов движения.
Русика же считает, что аберрация лучей происходит только при переходе в движущийся детектор. Aberration is in the eye of the beholder, в прямом смысле слова. Это принципиальная разница между русикой и классической физикой.
На 2 странице ветки, [url= http://glav.su/forum…#msg961060]в длинном сообщении с цитатами из учебников о выводе волнового уравнения[/url], я писал (ближе к концу):
«Ключевую роль при выводе волнового уравнения играет принцип Д’Аламбера, согласно которому все силы, действующие на некий элемент среды, включая силу инерции, должны уравновешиваться. По сути, принцип Д’Аламбера – это не что иное, как Второй Закон Ньютона. Можно даже сказать, что волновое уравнение - это другая форма записи Второго Закона Ньютона. Именно в этом заключается его физический смысл. Да, волновое уравнение можно получить и другими способами (например, используя принцип Гамильтона), но это не отменяет тот факт, что оно эквивалентно Второму Закону.»
На 3 странице [url= http://glav.su/forum…#msg967385]я писал[/url]:
«Волновое уравнение инвариантно относительно преобразований Галилея. Все члены волнового уравнения должны выглядеть одинаково во всех инерциальных системах отсчета.
Откуда это следует? Ранее я писал, что волновое уравнение выводится из Второго Закона Ньютона и по сути является другой формой записи Второго Закона, эквивалентно ему. Каждый член волнового уравнения представляет собой ту или иную силу. А сила инвариантна относительно преобразований Галилея – вектор силы одинаков в любой инерциальной системе отсчета.»
В двух словах это можно сформулировать так:
Волна = Сила.
Я писал это, еще оставаясь в рамках физики и пользуясь ее понятийным аппаратом (Второй Закон Ньютона, преобразования Галилея, инерциальные системы отсчета). Так вот, в рамках физики, из утверждения, что волновое уравнение инвариантно относительно преобразований Галилея, следует, что и лучи волн должны быть инвариантны во всех системах отсчета.
А что по этому поводу говорит классическая физика? В физике имеется ряд определений лучей, которые вполне согласуются друг с другом для покоящихся систем и покоящихся наблюдателей, но если или наблюдатели, или объекты, сквозь которые проходят лучи, двигаются, то между этими определениями возникают противоречия. Возьмем, например, такое определение:
«Лучи – это линии, перпендикулярные волновым поверхностям (фронтам волн), все точки которых имеют одинаковую фазу» (первое определение физики).
Прекрасное определение, ничего не имею против. Заметьте – линии, перпендикулярные волновым фронтам, ведут себя точно так же, как и силовые линии (которые инвариантны во всех СО). Скажем, сила звукового давления ΔF, действующая на элемент объема ΔxΔyΔz, равна
ΔF = – ∇p ΔxΔyΔz
Градиент давления, по определению, перпендикулярен поверхностям равного давления (то есть волновым фронтам). Все это вполне согласуется с моим утверждением, что лучи волн должны быть инвариантны во всех системах отсчета.
Звуковые волны, к сожалению, не так просто визуализировать, зато это можно сделать с волнами на поверхности воды. Приведу фото реального эксперимента, демонстрирующего эффект Доплера для волн на поверхности воды (из книги Benjamin Crowell, Vibrations and Waves, 1999-2002, стр. 54):
Предположим, что у нас имеется несколько удаленных наблюдателей, двигающихся с разными скоростями по горизонтали, и в определенный момент все они оказались друг рядом с другом, прямо над источником этих волн на воде. В этот момент все наблюдатели делают мгновенные снимки. Думаю, никто не будет возражать против утверждения, что волновые фронты, гребни и впадины между ними на всех этих снимках будут выглядеть одинаково? Волны на поверхности воды являются зримо материальными объектами, ничуть не менее материальными и занимающими вполне определенное место в пространстве, чем столб, Пизанская башня или автомобиль. Безусловно, эти волны подчиняются Аксиоме 8 (все тела, среды и их расположение относительно друг друга в фиксированный момент времени выглядят одинаково во всех системах отсчета).
Это относится не только к волнам на поверхности воды, но ко всем волнам. В частности, волновые фронты звуковых волн тоже должны выглядеть одинаково во всех системах отсчета. Классическая физика, собственно, с этим согласна. Это относится и к световым волнам; но об этом позже, чтобы не залезать в дебри вопроса о том, как мы будем делать «мгновенные снимки» фронтов световых волн, если и сами эти волны, и лучи, попадающие в фотокамеру, двигаются с одинаковой скоростью.
Итак, и физика, и русика согласны, что фронты волн должны выглядеть одинаково во всех системах отсчета. Значит ли это, что и лучи волн будут выглядеть одинаково во всех системах отсчета? Если мы применим данное выше определение «Лучи – это линии, перпендикулярные волновым фронтам», казалось бы, так и должно быть? Внезапно, физика от этого определения лучей отказывается. Оно применяется только для покоящихся систем и покоящихся наблюдателей, а если или среда, или наблюдатель двигается, то положено использовать совсем другое определение лучей:
«Лучи – это линии, вдоль которых переносится световая энергия; их направления совпадают с направлениями векторов групповой скорости» (второе определение физики).
В чем разница с первым определением? В том, что фронты волн и перпендикулярные им линии выглядят одинаково во всех системах отсчета (инвариантны относительно преобразований Галилея), а векторы групповой скорости – нет. Они подчиняются преобразованию Галилея для скоростей, следовательно, совпадающие с ними лучи должны быть направлены по-разному в разных системах отсчета. Важно, что лучи волн более не будут перпендикулярны фронтам волн.
Именно при помощи отклонения лучей волн от нормали к волновым фронтам и объясняет классическая физика явление аберрации света от звезд. Приведу цитату из [url= http://ufn.ru/ru/articles/1953/9/]неплохой статьи[/url] Б.Н. Гиммельфарба «К Объяснению Аберрации Звезд В Теории Относительности», Успехи Физ. Наук, 1953 г. Сентябрь, т. LI, вып. 1, стр. 99–114:
Обратите внимание на подчеркнутое красным – это как раз то, что я писал выше. Волновые поверхности во всех системах отсчета имеют одинаковое положение, но лучи совпадают с нормалью к волновой поверхности только в системе отсчета покоящейся среды. Физика не видит здесь противоречия. Но оно есть. И разрешается оно в русике – благодаря Принципу Дуализма Движения и Принципу Аберрации Волн.
Русика утверждает (постулирует), что любое движение, включая распространение волн, совершается относительно среды и оно объективно. Относительность движения проявляется лишь в движении наблюдателя относительно элемента среды или среды относительно наблюдателя. Что же касается аберрации волн, которая является экспериментальным фактом, то возникает она благодаря тому, что наблюдатель (например, телескоп, в случае световых волн) сам является телом, средой для распространения волн. Впрочем, не будем торопиться. Напомню, что ученые XIX века рассматривали как минимум три варианта взаимоотношений светоносного эфира с веществом: эфир, полностью увлекаемый веществом, неподвижный эфир, не увлекаемый веществом, и эфир, частично увлекаемый веществом. Причем большинство ученых в итоге склонялись к третьему варианту. Несколько позже мы будем рассматривать эти три варианта и сравнивать их следствия между собой. Сейчас же оставим этот вопрос открытым.
Заметим лишь, что именно при переходе световых волн от межзвездного эфира (предположительно неподвижного) в движущийся телескоп происходит аберрация направления лучей света. В межзвездном эфире лучи имели одно направление (перпендикулярное фронтам волн), при переходе в телескоп направление лучей резко меняется. Если среда (эфир) двигается вместе с телескопом, то в телескопе лучи тоже перпендикулярны фронтам волн. Тогда в движущемся телескопе фронты волн (волновые поверхности) имеют другое положение, чем в эфире, они расположены под углом аберрации к волновым фронтам в эфире.
В этом случае, все (удаленные) наблюдатели, с какими скоростями они бы ни двигались, согласятся, что в неподвижном эфире лучи света перпендикулярны фронтам световых волн, а при переходе в движущийся со скоростью v телескоп произойдет аберрация и фронтов волн, и перпендикулярных им лучей. На данном рисунке показаны фронты и лучи волн относительно эфира и относительно телескопа (в обоих случаях, per medium):
Вообще говоря, это не так, если эфир не увлекается движущимися телами, в частности, телескопом.
Физика считает, что для движущегося наблюдателя лучи света во всей неподвижной среде – в том числе далеко от наблюдателя – не перпендикулярны фронтам волн, а расположены под углом аберрации к нормали. Это является следствием того, что в физике отсутствует Принцип Дуализма Движения, физика не разделяет движение тела или волны относительно элемента среды и движение элемента среды относительно наблюдателя. Физика всегда пользуется только суммой этих двух видов движения.
Русика же считает, что аберрация лучей происходит только при переходе в движущийся детектор. Aberration is in the eye of the beholder, в прямом смысле слова. Это принципиальная разница между русикой и классической физикой.
Отредактировано: Yuri Rus - 02 дек 2019 14:08:56
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Лучевые Треки
При анализе движения тел сквозь элементы среды, движущихся друг относительно друга, нам очень помогла среда, в которой остаются следы от этих тел (треки). В качестве такой среды мы использовали сливочное масло комнатной температуры. Аналогично, чтобы доказать объективный характер аберрации лучей при распространении волн сквозь движущиеся элементы среды, нам было бы очень полезно иметь возможность получать треки лучей. И такая возможность есть.
Известны многочисленные светочувствительные химические вещества (флуоресцентные, фосфоресцентные, или, например, фоторезисты, которые применяются в фотолитографии для производства компьютерных чипов или ДНК-микрочипов). Если мы инкорпорируем молекулы некого светочувствительного вещества Q в прозрачную в каком-то диапазоне среду (жидкую, твердую или желеобразную), то в случае попадания на вещество Q света определенной длины волны, облученная область будет четко отличаться от необлученной. Например, она будет светиться какое-то время или, наоборот, станет непрозрачной.
Возьмем лазер, генерирующий очень короткие импульсы света очень узким пучком. Когда такой импульс света будет распространяться от лазера, он засветит вещество Q на своем пути и в среде образуется лучевой трек. Подобно трекам от ядра, дробинок или арбалетного болта в масле, этот лучевой трек является вполне материальным объектом. как столб или Пизанская башня. Он объективно существует и подчиняется Аксиоме 8 (выглядит одинаково для всех наблюдателей во всех системах отсчета). В жидкости, этот трек через некоторое время размоется, но это не принципиально.
Пусть лазер неподвижен относительно прозрачной жидкой среды М₁ с инкорпорированным веществом Q и «стреляет» импульсами света через короткие промежутки времени. В среде М₁ образуется неподвижный лучевой трек, который постоянно «обновляется» (жирная красная линия). Сквозь среду М₁ двигается прозрачное твердое тело М₂, в которое также инкорпорированы молекулы вещества Q. Для простоты, пусть коэффициенты преломления в средах М₁ и М₂ одинаковы. Каждый импульс света от лазера, проходя сквозь тело М₂, образует лучевой трек (тонкие красные линии). Так вот, русика утверждает, что лучевые треки в теле М₂ будут находиться под углом аберрации относительно лучевого трека в среде М₁.
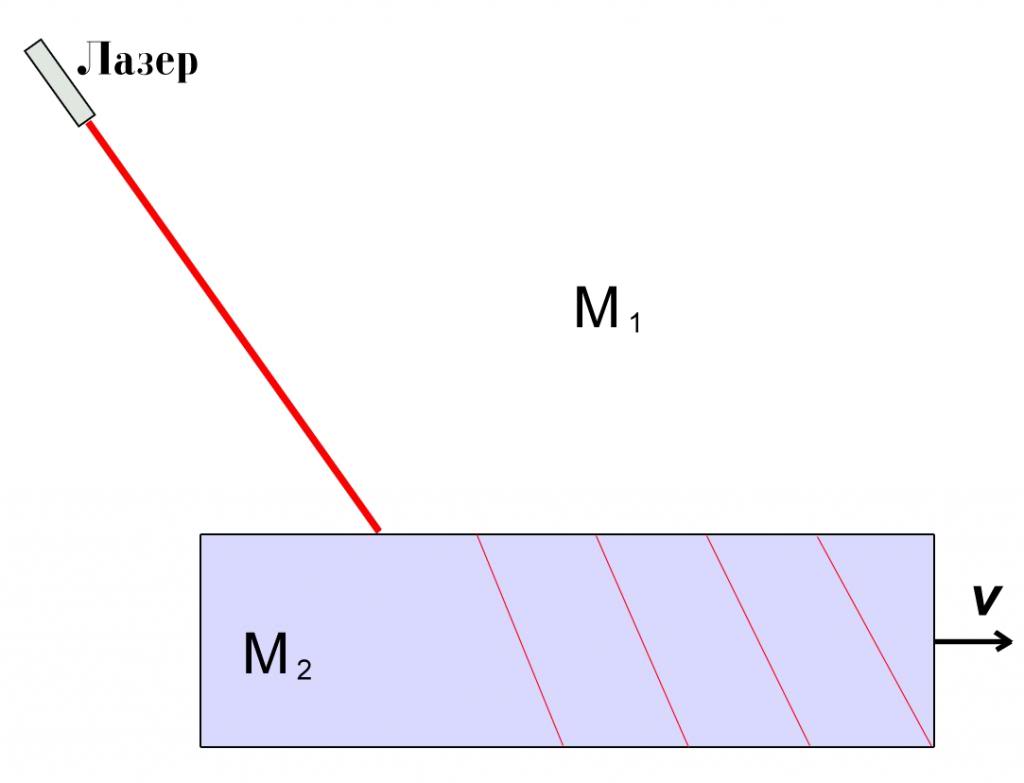
Подчеркну еще раз, что все эти лучевые треки являются объективно существующими материальными объектами. Мгновенные снимки и лучевого трека в среде М₁, и лучевых треков в теле М₂ будут выглядеть одинаково для всех удаленных наблюдателей во всех системах отсчета (Аксиома 8).
Это очень простой эксперимент, который однозначно доказывает, что направление лучей в среде является совершенно объективной характеристикой распространения волн и оно не зависит от скорости наблюдателя относительно среды (до тех пор, пока лучи не достигнут этого наблюдателя, то есть пока он сам не станет средой распространения лучей).
При анализе движения тел сквозь элементы среды, движущихся друг относительно друга, нам очень помогла среда, в которой остаются следы от этих тел (треки). В качестве такой среды мы использовали сливочное масло комнатной температуры. Аналогично, чтобы доказать объективный характер аберрации лучей при распространении волн сквозь движущиеся элементы среды, нам было бы очень полезно иметь возможность получать треки лучей. И такая возможность есть.
Известны многочисленные светочувствительные химические вещества (флуоресцентные, фосфоресцентные, или, например, фоторезисты, которые применяются в фотолитографии для производства компьютерных чипов или ДНК-микрочипов). Если мы инкорпорируем молекулы некого светочувствительного вещества Q в прозрачную в каком-то диапазоне среду (жидкую, твердую или желеобразную), то в случае попадания на вещество Q света определенной длины волны, облученная область будет четко отличаться от необлученной. Например, она будет светиться какое-то время или, наоборот, станет непрозрачной.
Возьмем лазер, генерирующий очень короткие импульсы света очень узким пучком. Когда такой импульс света будет распространяться от лазера, он засветит вещество Q на своем пути и в среде образуется лучевой трек. Подобно трекам от ядра, дробинок или арбалетного болта в масле, этот лучевой трек является вполне материальным объектом. как столб или Пизанская башня. Он объективно существует и подчиняется Аксиоме 8 (выглядит одинаково для всех наблюдателей во всех системах отсчета). В жидкости, этот трек через некоторое время размоется, но это не принципиально.
Пусть лазер неподвижен относительно прозрачной жидкой среды М₁ с инкорпорированным веществом Q и «стреляет» импульсами света через короткие промежутки времени. В среде М₁ образуется неподвижный лучевой трек, который постоянно «обновляется» (жирная красная линия). Сквозь среду М₁ двигается прозрачное твердое тело М₂, в которое также инкорпорированы молекулы вещества Q. Для простоты, пусть коэффициенты преломления в средах М₁ и М₂ одинаковы. Каждый импульс света от лазера, проходя сквозь тело М₂, образует лучевой трек (тонкие красные линии). Так вот, русика утверждает, что лучевые треки в теле М₂ будут находиться под углом аберрации относительно лучевого трека в среде М₁.
Подчеркну еще раз, что все эти лучевые треки являются объективно существующими материальными объектами. Мгновенные снимки и лучевого трека в среде М₁, и лучевых треков в теле М₂ будут выглядеть одинаково для всех удаленных наблюдателей во всех системах отсчета (Аксиома 8).
Это очень простой эксперимент, который однозначно доказывает, что направление лучей в среде является совершенно объективной характеристикой распространения волн и оно не зависит от скорости наблюдателя относительно среды (до тех пор, пока лучи не достигнут этого наблюдателя, то есть пока он сам не станет средой распространения лучей).
Отредактировано: Yuri Rus - 02 дек 2019 14:11:13
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Цитата: slavae
Не знаю, как насчёт отзывов настоящих учёных, я, как ненастоящий, читаю с интересом.
Что ж, рад, что хоть кто-то читает. Никаких комментариев на протяжении последних двух недель не было, так что я не был уверен, что кто-то читал (количество просмотров еще не означает, что визитор действительно дал себе труд прочесть весь текст).
Впрочем, в какой-то степени мне это помогает писать, не отвлекаясь на ответы на вопросы, которые могут быть чуть-чуть преждевременными. Я как раз подхожу к электродинамике русики. Это наиболее важное и интересное следствие Принципа Дуализма Движения и Принципа Аберрации Волн. Казалось бы, принципы эти настолько просты и очевидны, казалось бы, это всего лишь слегка отличная интерпретация тех же процессов, что прекрасно описывает физика. Но при всей простоте и очевидности, эти два принципа позволяют построить совершенно другую электродинамику (и не только) и предсказать ряд новых явлений, неизвестных физике. Предсказания эти достаточно легко проверить экспериментально, что, хотелось бы надеяться, хоть чуть-чуть поможет признанию русики.
64 года
Карма: +35.11
Регистрация: 07.12.2011
Сообщений: 188
Читатели: 0
Регистрация: 07.12.2011
Сообщений: 188
Читатели: 0
Цитата: Yuri Rus от 27.06.2013 01:12:26
Что ж, рад, что хоть кто-то читает. Никаких комментариев на протяжении последних двух недель не было, так что я не был уверен, что кто-то читал (количество просмотров еще не означает, что визитор действительно дал себе труд прочесть весь текст).
Вы не волнуйтесь, мы читаем

moscow
Карма: +788.72
Регистрация: 09.01.2011
Сообщений: 12,560
Читатели: 11
Регистрация: 09.01.2011
Сообщений: 12,560
Читатели: 11
Цитата: Yuri Rus от 27.06.2013 01:12:26
Что ж, рад, что хоть кто-то читает. Никаких комментариев на протяжении последних двух недель не было, так что я не был уверен, что кто-то читал (количество просмотров еще не означает, что визитор действительно дал себе труд прочесть весь текст).
Читаем, как и обещались, когда анонсировали начало изложения.

Народ безмолвствует. А счастлив ли Народ?...
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Цитата: TSA от 27.06.2013 16:00:04
Вы не волнуйтесь, мы читаем
Цитата: VoxPopuli от 27.06.2013 18:32:07
Читаем, как и обещались, когда анонсировали начало изложения.
Рад это слышать

Я стараюсь писать как можно проще и, по возможности, без чрезмерного количества формул. Так, чтобы было понятно не только профессиональным физикам, но любому инженеру и даже старшекласснику, хорошо освоившему всего лишь школьный курс физики. Поскольку ошибки физики, как я считаю, были заложены в самый ее фундамент (еще Галилеем, затем Ньютоном и Эйлером), я имею возможность пользоваться очень простым языком, объяснять всё на пальцах, качественно.
Понять меня (и поймать за руку, если я допущу ошибки) должно быть очень легко. Мои идеи чрезвычайно просты и очевидны. Вот только, чтоб увидеть очевидное, сначала кто-то должен ткнуть в него пальцем и сказать - смотрите! Люди ведь видят только то, что, как им сказали, они должны видеть. Зато, после того, как они это увидели, они уже об этом не забудут (как с тем танцующим медведем в самом первом моем сообщении данной ветки). На это я и надеюсь.
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Что Такое Аберрация?
Явление аберрации света от звезд было открыто английским астрономом Джеймсом Брэдли в 1727 г. как изменение видимого положения звезд в зависимости от направления движения Земли вокруг Солнца. Немножко тавтологии – будем называть аберрацией света физический процесс, ответственный за это изменение видимого положения звезд.
Определение русики: Аберрация волн это изменение направления луча относительно среды (per medium) при его переходе из одного элемента среды в другой, движущийся относительно первого элемента среды. Угол аберрации это угол между направлением луча в первом элементе среды (в его внутренней системе координат) и направлением этого луча во втором элементе (в его внутренней системе координат). Важно: пока луч света распространяется в первом элементе среды, ни о какой аберрации говорить нельзя. Для всех наблюдателей, независимо от их скоростей, направления лучей света относительно первого элемента среды, выглядят абсолютно одинаково (лучи перпендикулярны фронтам волн), а аберрация лучей происходит только при переходе в второй элемент среды, движущийся относительно первого элемента. Вторым элементом среды может являться детектор света – глаз или телескоп.
Физика называет аберрацией света нечто совершенно иное. К сожалению, в большинстве учебников и энциклопедий дается релятивистское определение аберрации (изменение направления распространения света при переходе из одной системы отсчёта к другой), которое в данный момент обсуждать нет смысла, потому что ключевые ошибки содержались еще в классической физике.
Классическая же физика объясняет аберрацию света как результат действия эфирного ветра (см. выше цитату из статьи Гиммельфарба). Если Земля движется относительно эфира со скоростью v, то согласно Принципу Относительности Движения Галилея, наблюдатель на Земле может считать, что это эфир и фронты световых волн двигаются относительно него со скоростью – v. В его системе отсчета, групповая скорость света с’ подчиняется следующему уравнению:
с' = с – v
где c – групповая скорость света в СО неподвижного эфира.
Таким образом, лучи света, с его точки зрения, направлены не перпендикулярно фронтам волн. В простейшем случае, если в системе отсчета неподвижного эфира свет падает на Землю под углом 90° к направлению ее движения, угол аберрации для земного наблюдателя можно определить по формуле
tg(θ) = v/c
Что здесь важно? Чем это определение отличается от определения русики? Тем, что в «классическом» определении аберрации вообще не участвует переход в другую среду (телескоп, например). Физика считает, что с точки зрения земного наблюдателя лучи света на всем протяжении пути от источника (звезды) до Земли двигались под углом аберрации к нормали к фронтам световых волн. Этот угол был одинаков и до телескопа, и внутри него (не будем пока учитывать преломление). То есть попадание в телескоп всего лишь фиксирует уже существующую аберрацию луча, не создает ее заново. Это можно изобразить следующим образом (в СО неподвижного телескопа, обдуваемого эфирным ветром):
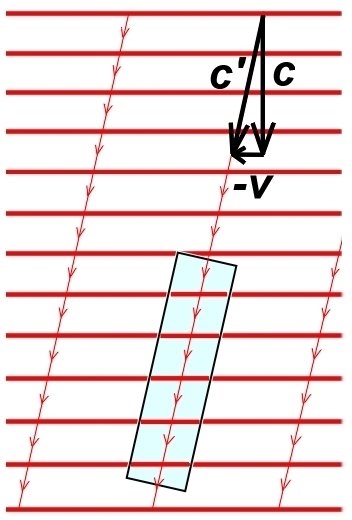
В русике же лучи света в эфире и телескопе распространяются совершенно иначе:
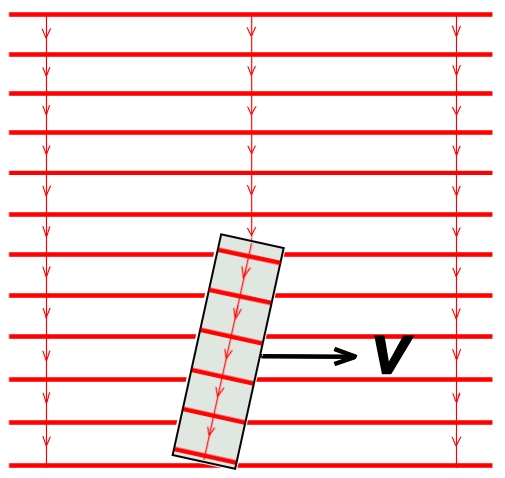
Это принципиальная разница, а вовсе не иная интерпретация одного и того же процесса. Но чтобы продемонстрировать это различие, мы сейчас перейдем от аберрации света к аберрации звука.
Явление аберрации света от звезд было открыто английским астрономом Джеймсом Брэдли в 1727 г. как изменение видимого положения звезд в зависимости от направления движения Земли вокруг Солнца. Немножко тавтологии – будем называть аберрацией света физический процесс, ответственный за это изменение видимого положения звезд.
Определение русики: Аберрация волн это изменение направления луча относительно среды (per medium) при его переходе из одного элемента среды в другой, движущийся относительно первого элемента среды. Угол аберрации это угол между направлением луча в первом элементе среды (в его внутренней системе координат) и направлением этого луча во втором элементе (в его внутренней системе координат). Важно: пока луч света распространяется в первом элементе среды, ни о какой аберрации говорить нельзя. Для всех наблюдателей, независимо от их скоростей, направления лучей света относительно первого элемента среды, выглядят абсолютно одинаково (лучи перпендикулярны фронтам волн), а аберрация лучей происходит только при переходе в второй элемент среды, движущийся относительно первого элемента. Вторым элементом среды может являться детектор света – глаз или телескоп.
Физика называет аберрацией света нечто совершенно иное. К сожалению, в большинстве учебников и энциклопедий дается релятивистское определение аберрации (изменение направления распространения света при переходе из одной системы отсчёта к другой), которое в данный момент обсуждать нет смысла, потому что ключевые ошибки содержались еще в классической физике.
Классическая же физика объясняет аберрацию света как результат действия эфирного ветра (см. выше цитату из статьи Гиммельфарба). Если Земля движется относительно эфира со скоростью v, то согласно Принципу Относительности Движения Галилея, наблюдатель на Земле может считать, что это эфир и фронты световых волн двигаются относительно него со скоростью – v. В его системе отсчета, групповая скорость света с’ подчиняется следующему уравнению:
с' = с – v
где c – групповая скорость света в СО неподвижного эфира.
Таким образом, лучи света, с его точки зрения, направлены не перпендикулярно фронтам волн. В простейшем случае, если в системе отсчета неподвижного эфира свет падает на Землю под углом 90° к направлению ее движения, угол аберрации для земного наблюдателя можно определить по формуле
tg(θ) = v/c
Что здесь важно? Чем это определение отличается от определения русики? Тем, что в «классическом» определении аберрации вообще не участвует переход в другую среду (телескоп, например). Физика считает, что с точки зрения земного наблюдателя лучи света на всем протяжении пути от источника (звезды) до Земли двигались под углом аберрации к нормали к фронтам световых волн. Этот угол был одинаков и до телескопа, и внутри него (не будем пока учитывать преломление). То есть попадание в телескоп всего лишь фиксирует уже существующую аберрацию луча, не создает ее заново. Это можно изобразить следующим образом (в СО неподвижного телескопа, обдуваемого эфирным ветром):
В русике же лучи света в эфире и телескопе распространяются совершенно иначе:
Это принципиальная разница, а вовсе не иная интерпретация одного и того же процесса. Но чтобы продемонстрировать это различие, мы сейчас перейдем от аберрации света к аберрации звука.
Отредактировано: Yuri Rus - 02 дек 2019 14:15:32

Карма: +113.64
Регистрация: 15.10.2008
Сообщений: 1,039
Читатели: 0
Регистрация: 15.10.2008
Сообщений: 1,039
Читатели: 0
Спасибо, пока все идеи понятно изложены. Ждём продолжения.
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Что Говорит Физика об Аберрации Звука?
Прежде чем рассматривать аберрацию звука с позиции русики, я, что довольно естественно, хотел узнать, что об этом думает физика. Ответ, как ни удивительно, такой: почти ничего. Поиск в Гугле на русском и английском языках дал всего две короткие научные статьи, три дискуссии на русских форумах альтернативной физики ([url= http://www.sciteclib…7234244/17]1[/url] [url= http://live.cnews.ru…try1457083]2[/url] [url= http://www.scientifi…1221654410]3[/url]), одну дискуссию [url= http://www.spacebant…68&page=41]на англоязычном форуме[/url] и две книги критиков теории относительности (одна [url= http://www.samomudr.…20Boga.pdf]на русском[/url], другая [url= http://www.paradox-p…evable.pdf]на английском[/url]). И всё.
Я, конечно, понимаю, что не всё есть в интернете. Было бы странно, если бы тема аберрации звука вообще никак не обсуждалась за последние 200 лет. Тем не менее, из более чем скромных результатов этого поиска можно заключить, что интерес к аберрации звука, по сравнению с аберрацией света (которая сыграла большую роль в появлении теории относительности и отказе от светоносного эфира), почти нулевой. Печально; но давайте посмотрим, что же думают об аберрации звука те немногие авторы, которых я нашел в интернете.
Отметим, что почти все альтернативщики, критикующие теорию относительности, понимают под аберрацией звука всего лишь различие между видимым направлением на источник звука (скажем, самолета) и направлением, откуда приходит звук от него. Это неверно. Аберрация света, напомню, это изменение направления, откуда приходят лучи света от звезды, при изменении направления движения Земли вокруг Солнца. При этом совершенно неважно, как двигаются (точнее, двигались годы назад, в момент излучения света) звезды относительно Земли. То есть аберрация (света или звука) – это явление, связанное именно с движением детектора волн относительно волновых фронтов.
Более интересны две научные статьи. Первая из них была опубликована в Nature – это очень престижный журнал и попасть туда очень трудно. Публикация этой статьи в Nature, несмотря на то, что она очень короткая (чуть меньше журнальной страницы), означает, что она получила одобрение научного сообщества на самом высоком уровне.
E. F. Fahy, Aberration of Plane Waves, Nature, Vol. 188, pp. 396-397 (1960).
Суть: автор утверждает, что аберрация возможна только для волн, двигающихся со скоростью света, но не для звука. Аберрация звука в Ньютоновской механике равна нулю, в то время как неправильное применение правила сложения скоростей привело бы к предположению, что должна быть аберрация звука, по порядку величины равная изменению скорости наблюдателя, деленному на скорость звука. Чтобы обосновать тот «факт», что классической аберрации звука не существует, автор предлагает следующий мысленный эксперимент: Детектор направления звука, или «звуковой телескоп», можно сделать из нескольких маленьких микрофонов, прикрепленных к некой твердой структуре в одной плоскости. Сигналы от микрофонов суммируются неким интегратором без существенной задержки. Когда этот звуковой телескоп активирован звуком от далекого источника, суммарный сигнал от микрофонов будет максимален, если сигналы от отдельных микрофонов будут в фазе, т.е. когда плоскость микрофонов параллельна плоским фронтам звуковых волн. Если телескоп станет двигаться, очевидно, что это условие параллельности (плоскости микрофонов и фронтов волн) не будет нарушено. Следовательно, никакого переориентирования телескопа для получения максимального сигнала не требуется, что означает, что никакой аберрации звука нет. Далее автор переходит к преобразованиям Лоренца; к аберрации звука это отношения уже не имеет.
Вторая (двухстраничная) статья написана четырьмя итальянскими учеными и опубликована 16 лет спустя в намного менее известном, чем Nature, журнале Lettere Al Nuovo Cimento Series 2. Статья посвящена критике статьи Fahy в Nature; это, так сказать, запоздалый комментарий на нее. И более на эту тему, такое впечатление, никто из физиков не высказывался. Fahy ни на кого не ссылался, итальянцы ссылались на Fahy и более ни на кого. Это тоже является показателем того, что этот вопрос никем, кроме них, не обсуждался.
G. Cavalleri, L. Galgani, G. Spavieri, G. Spinelli, On a misunderstanding about aberration of plane waves, Lettere Al Nuovo Cimento Series 2, Vol. 17, Issue 1, pp. 25-26 (1976).

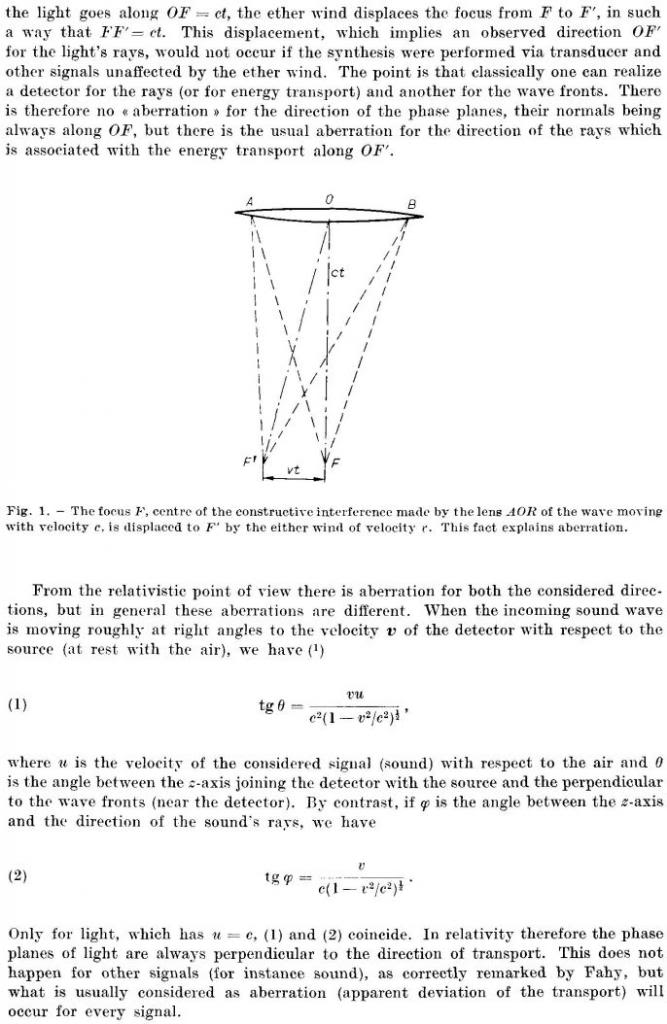
Авторы считают, что если бы аберрация звука в Ньютоновской механике была равна нулю, то и классическая интерпретация аберрации света, основанная на неподвижном эфире, была бы неверна также. Детектор, который предлагает Fahy, на самом деле является детектором нормалей к фронтам волн, а не детектором направления распространения энергии. С точки зрения классической физики, можно создать как детектор направления лучей (или распространения энергии), так и детектор волновых фронтов. При этом не будет никакой аберрации для направления волновых фронтов и нормалей к ним, но аберрация для направления лучей, которое связано с направлением переноса энергии, наблюдаться будет.
Кто из них прав? С позиции классической физики, правы итальянцы. «Классическая» аберрация является лишь следствием того, что направления лучей (света или звука) совпадают с направлениями векторов групповой скорости, которые при переходе из одной системы отсчета в другую меняются согласно правилу сложению скоростей с' = с – v. Следовательно, аберрация звука должна подчиняться тем же самым правилам, что и аберрация света (тем более, что для движущегося относительно воздуха наблюдателя встречный ветер является экспериментальным фактом, а не гипотезой, как эфирный ветер для света).
С позиции же русики, когда лучи звука распространяются в неподвижном воздухе, ни о какой аберрации говорить нельзя. Аберрация лучей звука происходит только при переходе в другую среду, движущуюся относительно воздуха. То же самое, что мы говорили выше про аберрацию света. Однако, и это очень важно, в рамках русики аберрация звука происходит совсем не так, как аберрация света (но и не так, как это описывают итальянцы и Fahy).
Прежде чем рассматривать аберрацию звука с позиции русики, я, что довольно естественно, хотел узнать, что об этом думает физика. Ответ, как ни удивительно, такой: почти ничего. Поиск в Гугле на русском и английском языках дал всего две короткие научные статьи, три дискуссии на русских форумах альтернативной физики ([url= http://www.sciteclib…7234244/17]1[/url] [url= http://live.cnews.ru…try1457083]2[/url] [url= http://www.scientifi…1221654410]3[/url]), одну дискуссию [url= http://www.spacebant…68&page=41]на англоязычном форуме[/url] и две книги критиков теории относительности (одна [url= http://www.samomudr.…20Boga.pdf]на русском[/url], другая [url= http://www.paradox-p…evable.pdf]на английском[/url]). И всё.
Я, конечно, понимаю, что не всё есть в интернете. Было бы странно, если бы тема аберрации звука вообще никак не обсуждалась за последние 200 лет. Тем не менее, из более чем скромных результатов этого поиска можно заключить, что интерес к аберрации звука, по сравнению с аберрацией света (которая сыграла большую роль в появлении теории относительности и отказе от светоносного эфира), почти нулевой. Печально; но давайте посмотрим, что же думают об аберрации звука те немногие авторы, которых я нашел в интернете.
Отметим, что почти все альтернативщики, критикующие теорию относительности, понимают под аберрацией звука всего лишь различие между видимым направлением на источник звука (скажем, самолета) и направлением, откуда приходит звук от него. Это неверно. Аберрация света, напомню, это изменение направления, откуда приходят лучи света от звезды, при изменении направления движения Земли вокруг Солнца. При этом совершенно неважно, как двигаются (точнее, двигались годы назад, в момент излучения света) звезды относительно Земли. То есть аберрация (света или звука) – это явление, связанное именно с движением детектора волн относительно волновых фронтов.
Более интересны две научные статьи. Первая из них была опубликована в Nature – это очень престижный журнал и попасть туда очень трудно. Публикация этой статьи в Nature, несмотря на то, что она очень короткая (чуть меньше журнальной страницы), означает, что она получила одобрение научного сообщества на самом высоком уровне.
E. F. Fahy, Aberration of Plane Waves, Nature, Vol. 188, pp. 396-397 (1960).
Суть: автор утверждает, что аберрация возможна только для волн, двигающихся со скоростью света, но не для звука. Аберрация звука в Ньютоновской механике равна нулю, в то время как неправильное применение правила сложения скоростей привело бы к предположению, что должна быть аберрация звука, по порядку величины равная изменению скорости наблюдателя, деленному на скорость звука. Чтобы обосновать тот «факт», что классической аберрации звука не существует, автор предлагает следующий мысленный эксперимент: Детектор направления звука, или «звуковой телескоп», можно сделать из нескольких маленьких микрофонов, прикрепленных к некой твердой структуре в одной плоскости. Сигналы от микрофонов суммируются неким интегратором без существенной задержки. Когда этот звуковой телескоп активирован звуком от далекого источника, суммарный сигнал от микрофонов будет максимален, если сигналы от отдельных микрофонов будут в фазе, т.е. когда плоскость микрофонов параллельна плоским фронтам звуковых волн. Если телескоп станет двигаться, очевидно, что это условие параллельности (плоскости микрофонов и фронтов волн) не будет нарушено. Следовательно, никакого переориентирования телескопа для получения максимального сигнала не требуется, что означает, что никакой аберрации звука нет. Далее автор переходит к преобразованиям Лоренца; к аберрации звука это отношения уже не имеет.
Вторая (двухстраничная) статья написана четырьмя итальянскими учеными и опубликована 16 лет спустя в намного менее известном, чем Nature, журнале Lettere Al Nuovo Cimento Series 2. Статья посвящена критике статьи Fahy в Nature; это, так сказать, запоздалый комментарий на нее. И более на эту тему, такое впечатление, никто из физиков не высказывался. Fahy ни на кого не ссылался, итальянцы ссылались на Fahy и более ни на кого. Это тоже является показателем того, что этот вопрос никем, кроме них, не обсуждался.
G. Cavalleri, L. Galgani, G. Spavieri, G. Spinelli, On a misunderstanding about aberration of plane waves, Lettere Al Nuovo Cimento Series 2, Vol. 17, Issue 1, pp. 25-26 (1976).
Авторы считают, что если бы аберрация звука в Ньютоновской механике была равна нулю, то и классическая интерпретация аберрации света, основанная на неподвижном эфире, была бы неверна также. Детектор, который предлагает Fahy, на самом деле является детектором нормалей к фронтам волн, а не детектором направления распространения энергии. С точки зрения классической физики, можно создать как детектор направления лучей (или распространения энергии), так и детектор волновых фронтов. При этом не будет никакой аберрации для направления волновых фронтов и нормалей к ним, но аберрация для направления лучей, которое связано с направлением переноса энергии, наблюдаться будет.
Кто из них прав? С позиции классической физики, правы итальянцы. «Классическая» аберрация является лишь следствием того, что направления лучей (света или звука) совпадают с направлениями векторов групповой скорости, которые при переходе из одной системы отсчета в другую меняются согласно правилу сложению скоростей с' = с – v. Следовательно, аберрация звука должна подчиняться тем же самым правилам, что и аберрация света (тем более, что для движущегося относительно воздуха наблюдателя встречный ветер является экспериментальным фактом, а не гипотезой, как эфирный ветер для света).
С позиции же русики, когда лучи звука распространяются в неподвижном воздухе, ни о какой аберрации говорить нельзя. Аберрация лучей звука происходит только при переходе в другую среду, движущуюся относительно воздуха. То же самое, что мы говорили выше про аберрацию света. Однако, и это очень важно, в рамках русики аберрация звука происходит совсем не так, как аберрация света (но и не так, как это описывают итальянцы и Fahy).
Отредактировано: Yuri Rus - 02 дек 2019 14:23:30
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Принцип Гюйгенса
Позаимствуем у физики Принцип Гюйгенса:
Каждую точку волнового фронта можно считать источником вторичных сферических волн. Поверхность, касательная ко всем вторичным волнам, представляет собой волновой фронт в следующий момент времени.
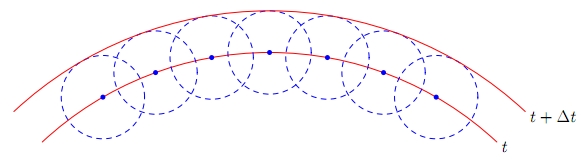
Это один из самых первых, самых проверенных, и самых, можно сказать, уважаемых принципов классической физики. Достаточно сказать, что основные законы геометрической оптики или выводятся, или проверяются (если были выведены иным методом) при помощи Принципа Гюйгенса. Вот широко известные примеры применения этого принципа:
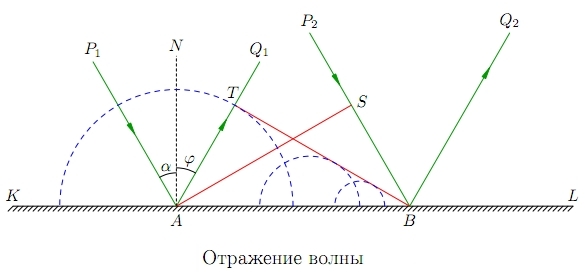
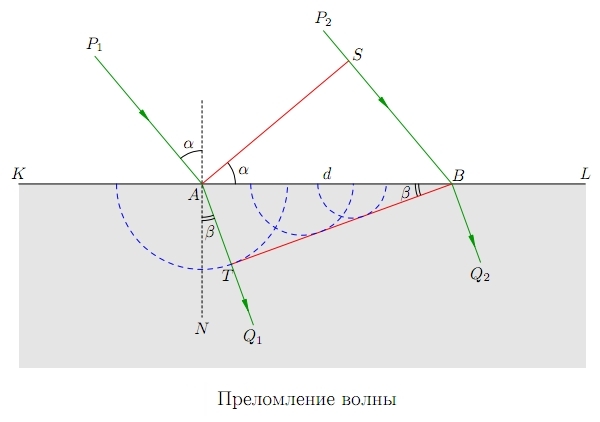
Но поскольку в русике любое движение, в том числе распространение волн, происходит относительно элементов среды, которые двигаются друг относительно друга (Принцип Дуализма Движения), нам придется модифицировать Принцип Гюйгенса. Вспомним также о первом определении лучей волн:
«Лучи – это линии, перпендикулярные волновым поверхностям (фронтам волн), все точки которых имеют одинаковую фазу».
Добавив это определение в Принцип Гюйгенса и объединив его с Принципом Дуализма Движения, мы получим 10 аксиому русики:
Аксиома 10 (Принцип Гюйгенса): Каждую точку волнового фронта можно считать источником вторичных сферических волн, которые распространяются во внутренней системе отсчета того элемента среды, которой принадлежит эта точка. Поверхность, касательная ко всем вторичным волнам, представляет собой волновой фронт в следующий момент времени. Лучи перпендикулярны волновому фронту в том элементе среды, в котором он распространяется.
Это означает, что когда волновой фронт распространяется в каком-то элементе среды, вторичные сферические волны распространяются относительно внутренней системы отсчета этого элемента так, как будто он покоится (хотя он может двигаться относительно других элементов среды). Когда какая-то точка фронта достигает границы между этим элементом среды и другим элементом, двигающимся относительно него, то соответствующая вторичная сферическая волна будет распространяться относительно внутренней системы отсчета уже второго элемента среды так, как будто он покоится.
В начале XIX века, Френель модифицировал Принцип Гюйгенса, введя представление о когерентности и интерференции волн. Это позволило ему объяснить дифракцию волн и послужило одной из основных причин, почему волновая теория света в тот момент победила корпускулярную. Модифицированный принцип стал называться [url= https://ru.wikipedia…0%BB%D1%8F]Принципом Гюйгенса-Френеля[/url]:
Каждый элемент волнового фронта можно рассматривать, как центр вторичного возмущения, порождающего вторичные сферические волны, а результирующее световое поле в каждой точке пространства будет определяться интерференцией этих волн.
Нет ничего сложного в том, чтобы изменить Принцип Гюйгенса-Френеля в соответствии с Принципом Дуализма Движения:
Аксиома 10’ (Принцип Гюйгенса-Френеля): Каждую точку волнового фронта можно считать источником вторичных сферических волн, которые распространяются во внутренней системе отсчета того элемента среды, которой принадлежит эта точка. Результирующее волновое поле в следующий момент времени в каждой точке пространства будет определяться интерференцией этих волн.
Но дифракция и интерференция нас пока не интересуют, а вот лучи, наоборот, интересуют. Так что мы будем пользоваться формулировкой Аксиомы 10, а не 10'.
Позаимствуем у физики Принцип Гюйгенса:
Каждую точку волнового фронта можно считать источником вторичных сферических волн. Поверхность, касательная ко всем вторичным волнам, представляет собой волновой фронт в следующий момент времени.
Это один из самых первых, самых проверенных, и самых, можно сказать, уважаемых принципов классической физики. Достаточно сказать, что основные законы геометрической оптики или выводятся, или проверяются (если были выведены иным методом) при помощи Принципа Гюйгенса. Вот широко известные примеры применения этого принципа:
Но поскольку в русике любое движение, в том числе распространение волн, происходит относительно элементов среды, которые двигаются друг относительно друга (Принцип Дуализма Движения), нам придется модифицировать Принцип Гюйгенса. Вспомним также о первом определении лучей волн:
«Лучи – это линии, перпендикулярные волновым поверхностям (фронтам волн), все точки которых имеют одинаковую фазу».
Добавив это определение в Принцип Гюйгенса и объединив его с Принципом Дуализма Движения, мы получим 10 аксиому русики:
Аксиома 10 (Принцип Гюйгенса): Каждую точку волнового фронта можно считать источником вторичных сферических волн, которые распространяются во внутренней системе отсчета того элемента среды, которой принадлежит эта точка. Поверхность, касательная ко всем вторичным волнам, представляет собой волновой фронт в следующий момент времени. Лучи перпендикулярны волновому фронту в том элементе среды, в котором он распространяется.
Это означает, что когда волновой фронт распространяется в каком-то элементе среды, вторичные сферические волны распространяются относительно внутренней системы отсчета этого элемента так, как будто он покоится (хотя он может двигаться относительно других элементов среды). Когда какая-то точка фронта достигает границы между этим элементом среды и другим элементом, двигающимся относительно него, то соответствующая вторичная сферическая волна будет распространяться относительно внутренней системы отсчета уже второго элемента среды так, как будто он покоится.
В начале XIX века, Френель модифицировал Принцип Гюйгенса, введя представление о когерентности и интерференции волн. Это позволило ему объяснить дифракцию волн и послужило одной из основных причин, почему волновая теория света в тот момент победила корпускулярную. Модифицированный принцип стал называться [url= https://ru.wikipedia…0%BB%D1%8F]Принципом Гюйгенса-Френеля[/url]:
Каждый элемент волнового фронта можно рассматривать, как центр вторичного возмущения, порождающего вторичные сферические волны, а результирующее световое поле в каждой точке пространства будет определяться интерференцией этих волн.
Нет ничего сложного в том, чтобы изменить Принцип Гюйгенса-Френеля в соответствии с Принципом Дуализма Движения:
Аксиома 10’ (Принцип Гюйгенса-Френеля): Каждую точку волнового фронта можно считать источником вторичных сферических волн, которые распространяются во внутренней системе отсчета того элемента среды, которой принадлежит эта точка. Результирующее волновое поле в следующий момент времени в каждой точке пространства будет определяться интерференцией этих волн.
Но дифракция и интерференция нас пока не интересуют, а вот лучи, наоборот, интересуют. Так что мы будем пользоваться формулировкой Аксиомы 10, а не 10'.
Отредактировано: Yuri Rus - 06 дек 2019 14:55:13
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Аберрация Звука в Движущемся Элементе Среды
Итак, постановка задачи: источник звука неподвижен относительно первого элемента среды М₁, а второй элемент той же среды М₂ двигается со скоростью v относительно М₁. Это упрощенный случай – никакой турбулентности нет, движение исключительно ламинарно (скорость элемента М₂ относительно элемента М₁ незначительна, потому что, если два элемента среды двигаются друг относительно друга с большой скоростью, всегда можно разбить среду на промежуточные слои/элементы, которые двигаются друг относительно друга с инкрементом Δv). Как, согласно Аксиоме 10 (Принципу Гюйгенса в формулировке русики), изменятся лучи звуковых волн при переходе из М₁ в М₂? Затем лучи выходят из элемента М₂ в элемент той же среды М₃, покоящийся относительно М₁. Что произойдет с лучами при этом переходе? Как изменятся частоты и длины волн лучей при их переходе из М₁ в М₂ и затем в М₃?
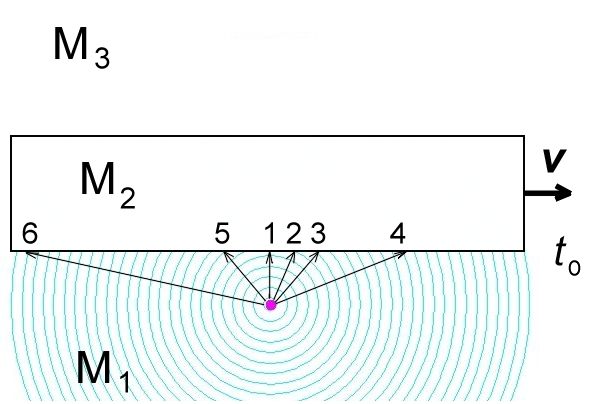
Я довольно подробно разбираю эти вопросы, будет много рисунков и текста. Все это очень просто и вроде бы не тянет на переворот в науке, но, тем не менее, именно при помощи таких очень простых рассуждений я хочу показать, где именно в физике содержатся ошибки. Фундаментальные – то есть в самых основах физики. Потому и простые. Чуть позже, я сделаю ряд очень далеко идущих выводов именно из этого анализа аберрации звука в движущемся элементе среды.
Рассмотрим переход лучей 1-6 из М₁ в М₂ по отдельности (с увеличением, чтобы можно было считать фронты волн плоскими).
а) Луч 1
Сначала рассмотрим луч 1, который перпендикулярен границе раздела М₁ и М₂ и перпендикулярен направлению движения элемента М₂. Пусть фронт волны падает на границу раздела – все точки этого фронта достигает этой границы одновременно. Через промежуток времени ∆t, элемент М₂ сдвинется вправо на расстояние v∆t, а фронт волны сдвинется вверх на расстояние c∆t. В дальнейшем, фронт волны будет двигаться прямо вверх относительно элемента М₂, пока не достигнет границы с элементом М₃, после которой он будет распространяться прямо вверх в элементе М₃ (со смещением вправо относительно элемента М₁).
На рисунке изображены последовательные фронты волн, распространяющиеся в элементе М₁, затем в М₂ и в М₃.
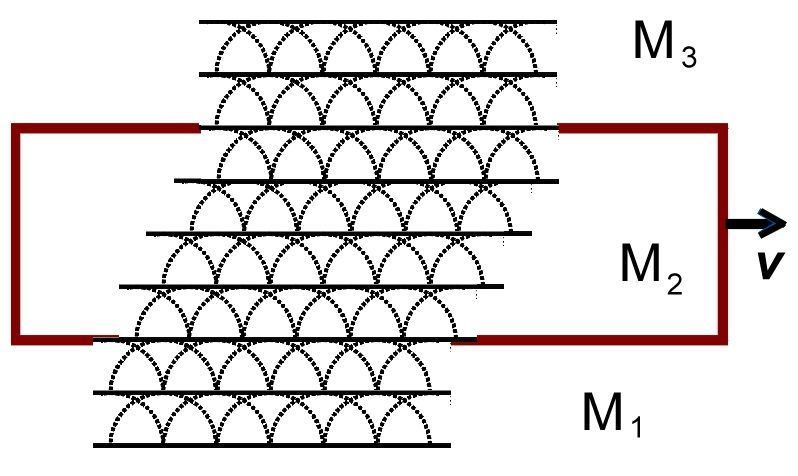
Чтобы не было двусмысленности насчет того, как двигаются лучи звука относительно элемента М₂ (боюсь, может создаться впечатление, что лучи двигаются под углом слева вверх, а не прямо вверх), добавлю еще один рисунок. Предположим, что у нас есть возможность визуализировать лучи звука примерно так же, как мы это обсуждали выше для лучей света. Пусть, аналогично светочувствительным веществам, у нас имеются вещества, чувствительные к ультразвуку (скажем, в отсутствие ультразвука эти вещества прозрачны для света, а под воздействием ультразвука становятся непрозрачными, хотя бы на какое-то время). Тогда источник ультразвука, генерирующий очень короткие импульсы очень узким пучком, позволит нам создать лучевые треки в элементах М₁, М₂ и М₃.
Пусть источник неподвижен относительно элемента М₁ с чувствительным к ультразвуку веществом и «стреляет» импульсами звука через короткие промежутки времени. В элементе М₁ образуется неподвижный лучевой трек, который постоянно «обновляется» (жирная красная линия). В элементе М₂ лучевые треки будут расположены на некотором расстоянии друг от друга, а в элементе М₃ также будет неподвижный лучевой трек, который сдвинут относительно трека в М₁ на некоторое расстояние (равное толщине элемента М₂, помноженной на v/c).
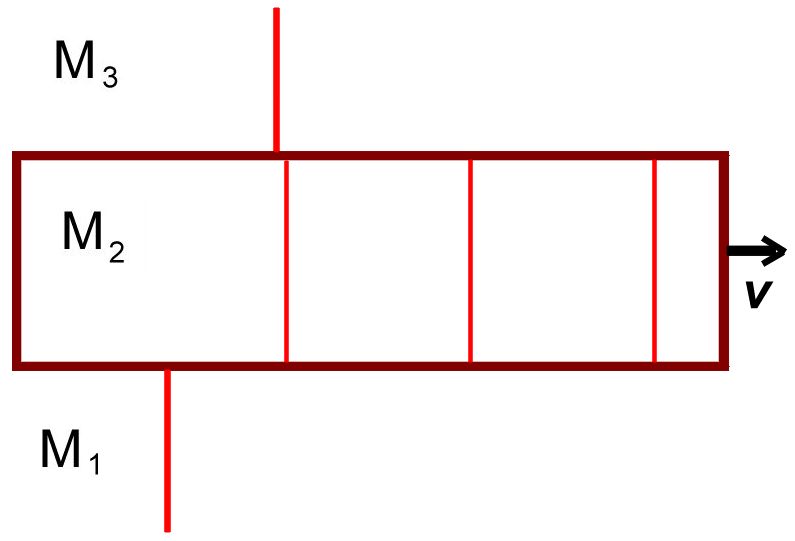
Мы видим, что аберрация звука происходит совсем не так, как аберрация света. Для поперечного луча, аберрации (изменения угла луча) нет вообще, есть только сдвиг луча при выходе из движущегося элемента среды опять в покоящуюся. Для света же аберрация поперечного луча максимальна, по сравнению с другими углами падения.
Итак, постановка задачи: источник звука неподвижен относительно первого элемента среды М₁, а второй элемент той же среды М₂ двигается со скоростью v относительно М₁. Это упрощенный случай – никакой турбулентности нет, движение исключительно ламинарно (скорость элемента М₂ относительно элемента М₁ незначительна, потому что, если два элемента среды двигаются друг относительно друга с большой скоростью, всегда можно разбить среду на промежуточные слои/элементы, которые двигаются друг относительно друга с инкрементом Δv). Как, согласно Аксиоме 10 (Принципу Гюйгенса в формулировке русики), изменятся лучи звуковых волн при переходе из М₁ в М₂? Затем лучи выходят из элемента М₂ в элемент той же среды М₃, покоящийся относительно М₁. Что произойдет с лучами при этом переходе? Как изменятся частоты и длины волн лучей при их переходе из М₁ в М₂ и затем в М₃?
Я довольно подробно разбираю эти вопросы, будет много рисунков и текста. Все это очень просто и вроде бы не тянет на переворот в науке, но, тем не менее, именно при помощи таких очень простых рассуждений я хочу показать, где именно в физике содержатся ошибки. Фундаментальные – то есть в самых основах физики. Потому и простые. Чуть позже, я сделаю ряд очень далеко идущих выводов именно из этого анализа аберрации звука в движущемся элементе среды.
Рассмотрим переход лучей 1-6 из М₁ в М₂ по отдельности (с увеличением, чтобы можно было считать фронты волн плоскими).
а) Луч 1
Сначала рассмотрим луч 1, который перпендикулярен границе раздела М₁ и М₂ и перпендикулярен направлению движения элемента М₂. Пусть фронт волны падает на границу раздела – все точки этого фронта достигает этой границы одновременно. Через промежуток времени ∆t, элемент М₂ сдвинется вправо на расстояние v∆t, а фронт волны сдвинется вверх на расстояние c∆t. В дальнейшем, фронт волны будет двигаться прямо вверх относительно элемента М₂, пока не достигнет границы с элементом М₃, после которой он будет распространяться прямо вверх в элементе М₃ (со смещением вправо относительно элемента М₁).
На рисунке изображены последовательные фронты волн, распространяющиеся в элементе М₁, затем в М₂ и в М₃.
Чтобы не было двусмысленности насчет того, как двигаются лучи звука относительно элемента М₂ (боюсь, может создаться впечатление, что лучи двигаются под углом слева вверх, а не прямо вверх), добавлю еще один рисунок. Предположим, что у нас есть возможность визуализировать лучи звука примерно так же, как мы это обсуждали выше для лучей света. Пусть, аналогично светочувствительным веществам, у нас имеются вещества, чувствительные к ультразвуку (скажем, в отсутствие ультразвука эти вещества прозрачны для света, а под воздействием ультразвука становятся непрозрачными, хотя бы на какое-то время). Тогда источник ультразвука, генерирующий очень короткие импульсы очень узким пучком, позволит нам создать лучевые треки в элементах М₁, М₂ и М₃.
Пусть источник неподвижен относительно элемента М₁ с чувствительным к ультразвуку веществом и «стреляет» импульсами звука через короткие промежутки времени. В элементе М₁ образуется неподвижный лучевой трек, который постоянно «обновляется» (жирная красная линия). В элементе М₂ лучевые треки будут расположены на некотором расстоянии друг от друга, а в элементе М₃ также будет неподвижный лучевой трек, который сдвинут относительно трека в М₁ на некоторое расстояние (равное толщине элемента М₂, помноженной на v/c).
Мы видим, что аберрация звука происходит совсем не так, как аберрация света. Для поперечного луча, аберрации (изменения угла луча) нет вообще, есть только сдвиг луча при выходе из движущегося элемента среды опять в покоящуюся. Для света же аберрация поперечного луча максимальна, по сравнению с другими углами падения.
Отредактировано: Yuri Rus - 06 дек 2019 14:58:13
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
б) Луч 2
Пусть два последовательных фронта волны падают на границу раздела между М₁ и М₂ под углом ψ. В элементе М₁, расстояние между фронтами равно λ₁. Это длина отрезка |HA|. Фронт 1 касается границы раздела в точке А / A' (принадлежащих, соответственно, элементам М₁ и М₂), фронт 2 – в точке Е / E’.
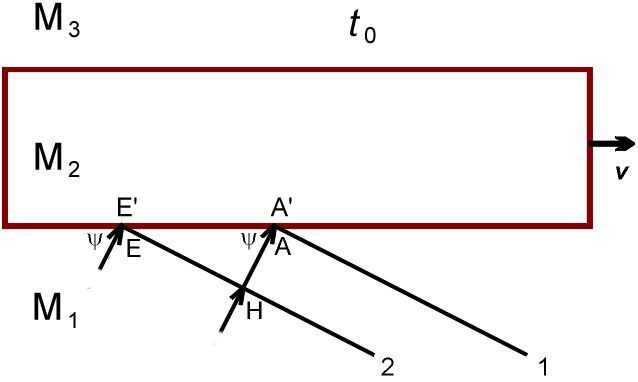
Через промежуток времени ∆t = λ₁/c, фронт 2 займет место фронта 1 в элементе М₁. За это время, элемент М₂ сдвинется вправо на расстояние v∆t, в том числе сдвинутся точки A’ и E’. Согласно Принципу Гюйгенса (в формулировке Аксиомы 10), точки A' и E' станут источниками вторичных сферических волн, распространяющихся в элементе М₂. Радиус этих волн будет равен λ₁, то есть равен расстоянию между фронтами волн 1 и 2 в элементе М₁.
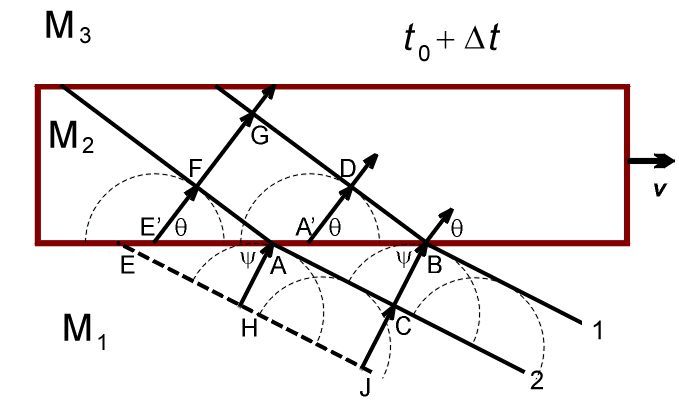
Чтобы получить фронт волны 1 в элементе М₂, мы должны соединить точки B и D, фронт волны 2 – точки A и F. Соответствующие лучи перпендикулярны этим фронтам. Мы видим, что угол θ между направлением луча внутри М₂ и границей раздела изменился, по сравнению с углом ψ (между направлением этого луча внутри М₁ и границей раздела). Произошла аберрация звука – но, что обращает на себя внимание, прямо противоположно аберрации света. Лучи звука отклоняются в том направлении, в котором двигается элемент М₂, а лучи света от звезд отклонялись в направлении, противоположном движению Земли вокруг Солнца. Мы к этому еще вернемся, после того как закончим со звуком.
Из простых геометрических соображений, мы можем легко получить зависимость между θ, ψ и v:
cos θ = 1/(1/cosψ – v/c)
Аналогично, мы можем определить, как изменится расстояние между фронтами 1 и 2 в элементе М₂ по сравнению с этим расстоянием в элементе М₁ (т.е. λ₁):
λ₂ = λ₁ (1 + (v/c) cosθ) = λ₁ / (1 – (v/c) cosψ)
Частоты волн будут связаны соотношением:
ω₂ = ω₁ (1 – (v/c) cosψ)
Эти формулы, разумеется, применимы и к лучу 1 (поперечному): подставив ψ = 90°, мы получим θ = 90°, λ₂ = λ₁ и ω₂ = ω₁.
Вернемся к лучу 2. Пройдя сквозь всю толщину элемента М₂, фронты 1 и 2 достигнут границы раздела с элементом М₃, где опять произойдет аберрация звука.
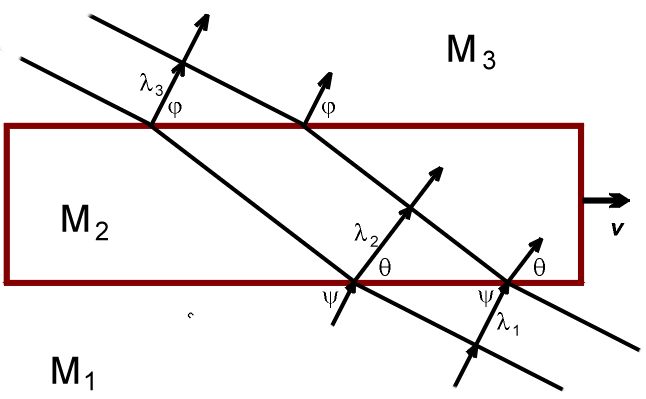
Повторив несложные манипуляции, мы увидим, что φ, угол между направлением луча в элементе М₃ и границей раздела с М₂, равен ψ, аналогичному углу в элементе М₁, а λ₃, расстояние между фронтами 1 и 2 в элементе М₃, равно λ₁, аналогичному расстоянию в элементе М₁:
cosφ = 1/(1/cosθ + v/c) = cosψ
λ₃ = λ₂ (1 – (v/c) cosφ) = λ₁ (1 – (v/c) cosφ) / (1 – (v/c) cosψ) = λ₁
Что видно и из рисунка.
в) Луч 3
При определенном критическом угле ψ₀, аберрация луча будет столь велика, что угол θ будет равен 0° и луч в элементе М₂ будет параллелен границе раздела с элементом М₁:
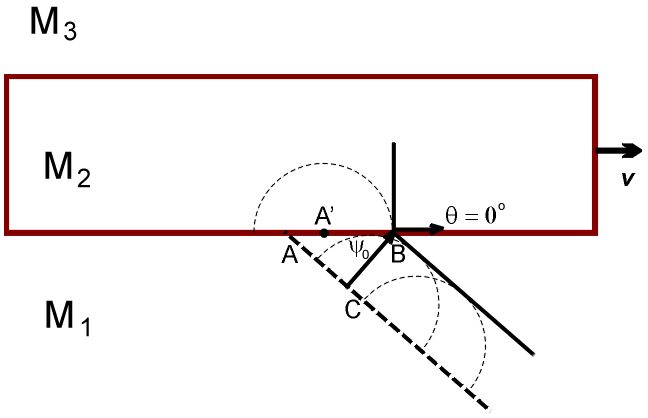
Подставив θ = 0° в уравнение cos θ = 1/(1/cosψ – v/c), мы получим
cosψ₀ = 1/(1 + v/c)
Это произойдет, когда расстояние |A’B| равно c∆t, так что
|AB| = |AA’| + |A’B| = vΔt + c∆t
г) Луч 4
Все лучи с углами падения меньше ψ₀ будут отражаться от границы раздела М₁ и М₂:
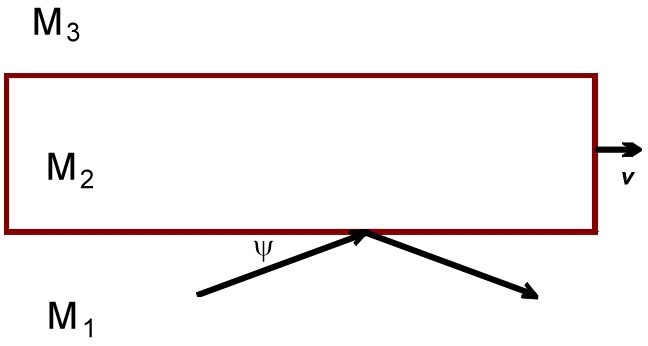
Казалось бы, это тривиально – но это будет играть важную роль в искривлении лучей от движущихся источников.
Пусть два последовательных фронта волны падают на границу раздела между М₁ и М₂ под углом ψ. В элементе М₁, расстояние между фронтами равно λ₁. Это длина отрезка |HA|. Фронт 1 касается границы раздела в точке А / A' (принадлежащих, соответственно, элементам М₁ и М₂), фронт 2 – в точке Е / E’.
Через промежуток времени ∆t = λ₁/c, фронт 2 займет место фронта 1 в элементе М₁. За это время, элемент М₂ сдвинется вправо на расстояние v∆t, в том числе сдвинутся точки A’ и E’. Согласно Принципу Гюйгенса (в формулировке Аксиомы 10), точки A' и E' станут источниками вторичных сферических волн, распространяющихся в элементе М₂. Радиус этих волн будет равен λ₁, то есть равен расстоянию между фронтами волн 1 и 2 в элементе М₁.
Чтобы получить фронт волны 1 в элементе М₂, мы должны соединить точки B и D, фронт волны 2 – точки A и F. Соответствующие лучи перпендикулярны этим фронтам. Мы видим, что угол θ между направлением луча внутри М₂ и границей раздела изменился, по сравнению с углом ψ (между направлением этого луча внутри М₁ и границей раздела). Произошла аберрация звука – но, что обращает на себя внимание, прямо противоположно аберрации света. Лучи звука отклоняются в том направлении, в котором двигается элемент М₂, а лучи света от звезд отклонялись в направлении, противоположном движению Земли вокруг Солнца. Мы к этому еще вернемся, после того как закончим со звуком.
Из простых геометрических соображений, мы можем легко получить зависимость между θ, ψ и v:
cos θ = 1/(1/cosψ – v/c)
Скрытый текст
Аналогично, мы можем определить, как изменится расстояние между фронтами 1 и 2 в элементе М₂ по сравнению с этим расстоянием в элементе М₁ (т.е. λ₁):
λ₂ = λ₁ (1 + (v/c) cosθ) = λ₁ / (1 – (v/c) cosψ)
Частоты волн будут связаны соотношением:
ω₂ = ω₁ (1 – (v/c) cosψ)
Эти формулы, разумеется, применимы и к лучу 1 (поперечному): подставив ψ = 90°, мы получим θ = 90°, λ₂ = λ₁ и ω₂ = ω₁.
Вернемся к лучу 2. Пройдя сквозь всю толщину элемента М₂, фронты 1 и 2 достигнут границы раздела с элементом М₃, где опять произойдет аберрация звука.
Повторив несложные манипуляции, мы увидим, что φ, угол между направлением луча в элементе М₃ и границей раздела с М₂, равен ψ, аналогичному углу в элементе М₁, а λ₃, расстояние между фронтами 1 и 2 в элементе М₃, равно λ₁, аналогичному расстоянию в элементе М₁:
cosφ = 1/(1/cosθ + v/c) = cosψ
λ₃ = λ₂ (1 – (v/c) cosφ) = λ₁ (1 – (v/c) cosφ) / (1 – (v/c) cosψ) = λ₁
Что видно и из рисунка.
в) Луч 3
При определенном критическом угле ψ₀, аберрация луча будет столь велика, что угол θ будет равен 0° и луч в элементе М₂ будет параллелен границе раздела с элементом М₁:
Подставив θ = 0° в уравнение cos θ = 1/(1/cosψ – v/c), мы получим
cosψ₀ = 1/(1 + v/c)
Это произойдет, когда расстояние |A’B| равно c∆t, так что
|AB| = |AA’| + |A’B| = vΔt + c∆t
г) Луч 4
Все лучи с углами падения меньше ψ₀ будут отражаться от границы раздела М₁ и М₂:
Казалось бы, это тривиально – но это будет играть важную роль в искривлении лучей от движущихся источников.
Отредактировано: Yuri Rus - 06 дек 2019 18:55:00
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
д) Луч 5
Напомню, что луч 1 – поперечный. Лучи 2, 3 и 4 падают на элемент М₂ хоть и под углом, но «вдогонку»: он удаляется от источника. Лучи 5 и 6 «встречные» – элемент М₂ приближается к источнику.
Пусть фронт волны падает на границу раздела М₁ и М₂ под углом ψ, который для луча 5 больше 90° (угол WBC). В момент t₀ фронт касается границы в точке А / A'. Через промежуток времени ∆t, элемент М₂ сдвинется вправо на расстояние v∆t, в том числе сдвинется точка A’, а фронт волны сдвинется влево-вверх на расстояние c∆t (вектор СВ). Согласно Аксиоме 10, точка A' станет источником вторичной сферической волны радиуса c∆t, распространяющейся в элементе М₂. Чтобы получить фронт волны в элементе М₂, мы должны соединить точки B и D; соответствующий луч перпендикулярен этому фронту.
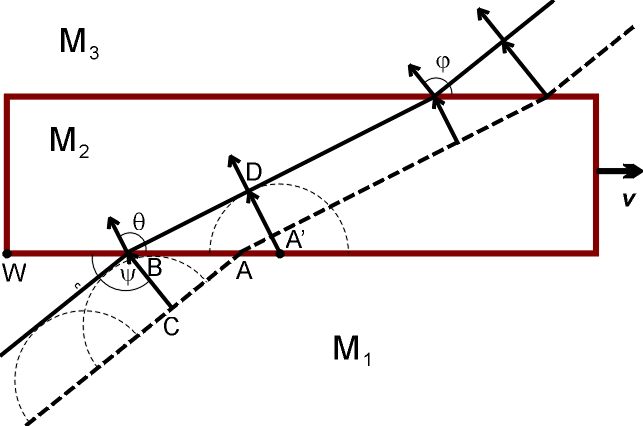
Из рисунка видно, что луч 5, так же как и луч 2, отклоняется в том же направлении, в котором двигается элемент М₂. Все формулы для углов ψ, θ, φ и длин волн λ₁, λ₂, λ₃, написанные выше для луча 2, собственно, справедливы и для луча 5. При этом
0° < ψ < 180°
е) Луч 6
Луч 6 отличается от луча 5 тем, что он направлен почти по касательной к границе раздела М₁ и М₂, то есть угол ψ почти равен 180°:
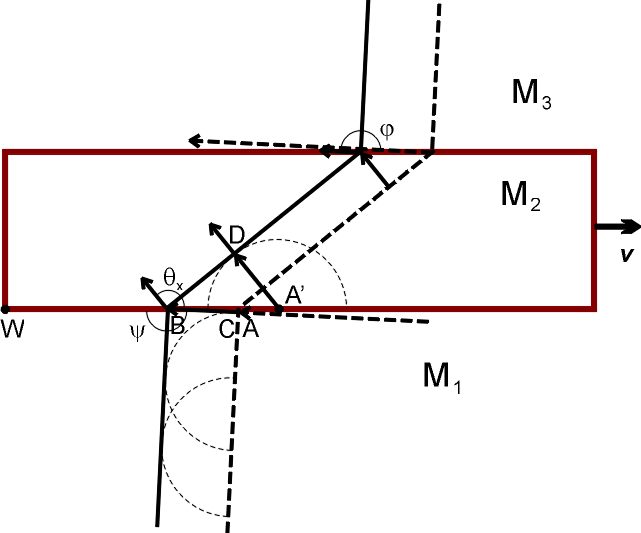
Подставив ψ = 180° в уравнение cosθ = 1/(1/cosψ – v/c), мы получим критический, или максимальный, угол θₓ:
cosθₓ = – 1/(1 + v/c)
При малых скоростях элемента М₂, то есть при v ≪ c, угол θₓ будет стремиться к 135°.
Напомню, что луч 1 – поперечный. Лучи 2, 3 и 4 падают на элемент М₂ хоть и под углом, но «вдогонку»: он удаляется от источника. Лучи 5 и 6 «встречные» – элемент М₂ приближается к источнику.
Пусть фронт волны падает на границу раздела М₁ и М₂ под углом ψ, который для луча 5 больше 90° (угол WBC). В момент t₀ фронт касается границы в точке А / A'. Через промежуток времени ∆t, элемент М₂ сдвинется вправо на расстояние v∆t, в том числе сдвинется точка A’, а фронт волны сдвинется влево-вверх на расстояние c∆t (вектор СВ). Согласно Аксиоме 10, точка A' станет источником вторичной сферической волны радиуса c∆t, распространяющейся в элементе М₂. Чтобы получить фронт волны в элементе М₂, мы должны соединить точки B и D; соответствующий луч перпендикулярен этому фронту.
Из рисунка видно, что луч 5, так же как и луч 2, отклоняется в том же направлении, в котором двигается элемент М₂. Все формулы для углов ψ, θ, φ и длин волн λ₁, λ₂, λ₃, написанные выше для луча 2, собственно, справедливы и для луча 5. При этом
0° < ψ < 180°
е) Луч 6
Луч 6 отличается от луча 5 тем, что он направлен почти по касательной к границе раздела М₁ и М₂, то есть угол ψ почти равен 180°:
Подставив ψ = 180° в уравнение cosθ = 1/(1/cosψ – v/c), мы получим критический, или максимальный, угол θₓ:
cosθₓ = – 1/(1 + v/c)
При малых скоростях элемента М₂, то есть при v ≪ c, угол θₓ будет стремиться к 135°.
Отредактировано: Yuri Rus - 06 дек 2019 18:57:53
64 года
Карма: +394.08
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Регистрация: 20.10.2008
Сообщений: 4,380
Читатели: 1
Модератор ветки
Подытожим. Аберрация лучей звука при их переходе в движущийся элемент среды существует и весьма заметна. При этом, лучи звука отклоняются в том же направлении, в котором двигается элемент среды, что противоположно тому, что наблюдалось для аберрации света.
Еще несколько слов о загадочном отсутствии интереса у физиков к аберрации звука. На самом деле, нельзя сказать, что физика вообще не интересовалась вопросом изменения направления лучей звука при их распространении в движущихся средах. Интересовалась; более того, результаты такого анализа с позиции физики довольно близки к тому, что я написал выше (с позиции русики).
Вот только этот анализ никто не связывал с аберрацией звука и тем более не делал никаких выводов насчет аберрации света. Это не просто вопрос терминологии. Нет; в том-то и дело, что (как я пытаюсь показать) вопрос направления лучей и их аберрация в движущихся элементах среды имеет огромное значение для самого понимания сущности движения, волн и сил. Физика решила этот вопрос неверно, потому всё ее развитие пошло по ложному пути (речь идет о классической физике, не только о теории относительности и квантовой механике).
Физика рассматривает распространение волн в xyz координатах системы отсчета некого наблюдателя. Русика утверждает, что обойтись xyz координатами при описании волн принципиально нельзя. Разные элементы среды (каждый из которых имеет свою собственную внутреннюю систему координат) двигаются в разных направлениях с разными скоростями, вследствие чего лучи волн, переходя из одного элемента в другой, подвергаются аберрации – и пренебрегать этим нельзя. Забегая далеко вперед (я хотел говорить об этом значительно позднее), сила, действующая на элементы среды, тоже ведет себя как волна, то есть распространяется с определенной скоростью от источника и подвергается аберрации, отражению и преломлению. Именно учет движения элементов среды (Принцип Дуализма Движения) и аберрации волн и сил (Принцип Аберрации) и делает русику принципиально другой наукой о движении, чем физика. И требует принципиально другой математики. От физики, в итоге, останется на удивление мало. Очень немногое мы сможем позаимствовать (Принцип Гюйгенса одно из счастливых исключений).
Еще несколько слов о загадочном отсутствии интереса у физиков к аберрации звука. На самом деле, нельзя сказать, что физика вообще не интересовалась вопросом изменения направления лучей звука при их распространении в движущихся средах. Интересовалась; более того, результаты такого анализа с позиции физики довольно близки к тому, что я написал выше (с позиции русики).
Скрытый текст
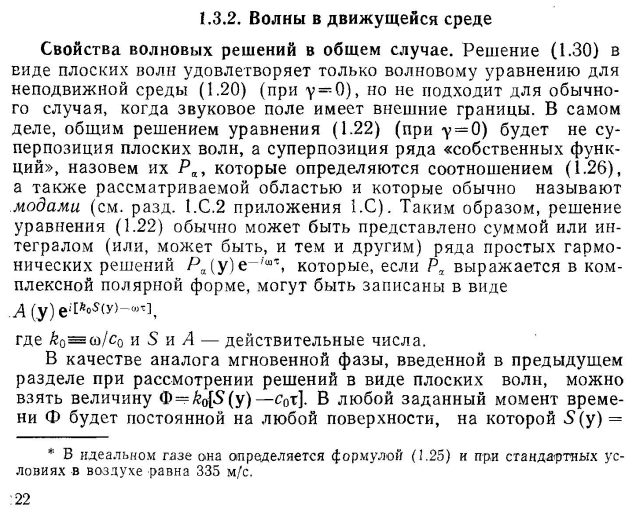
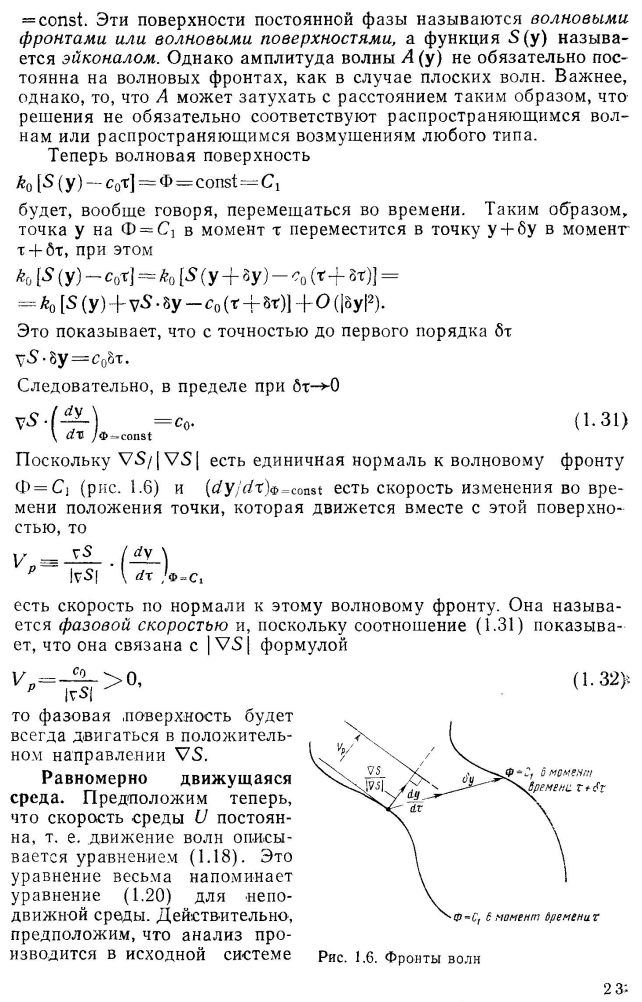
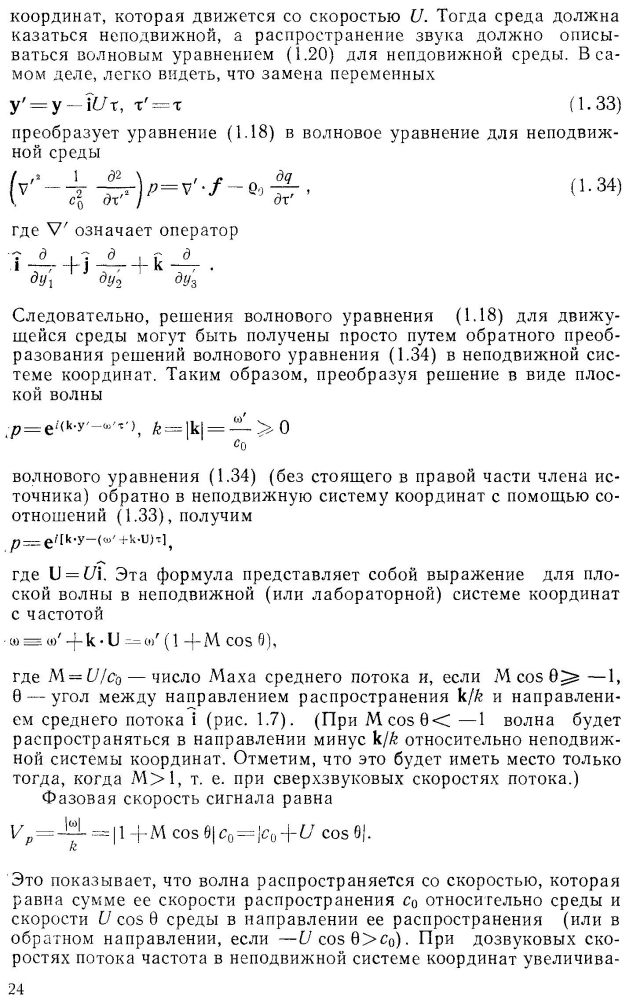
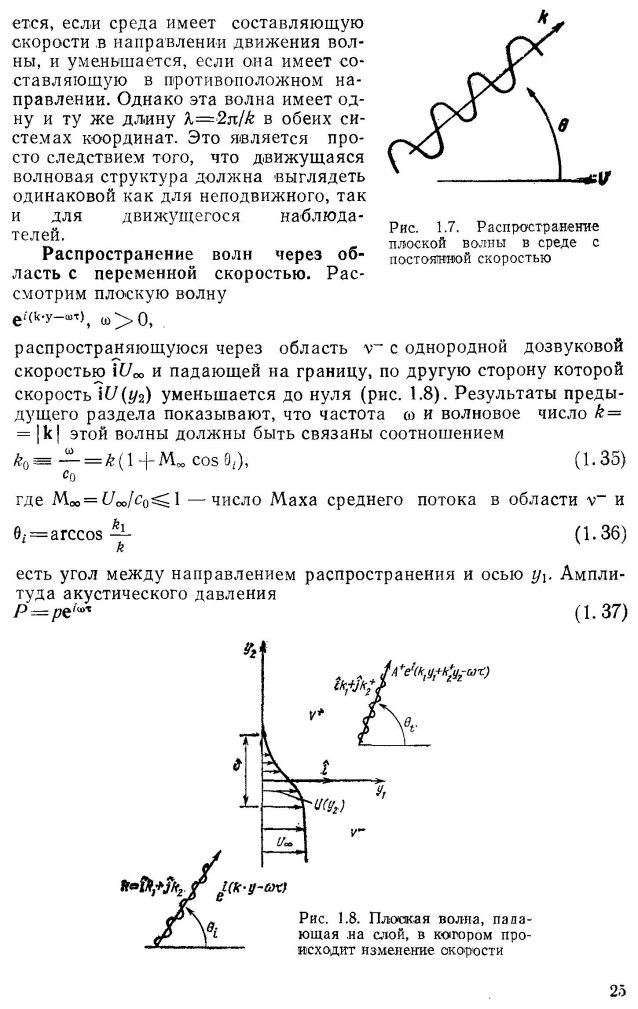
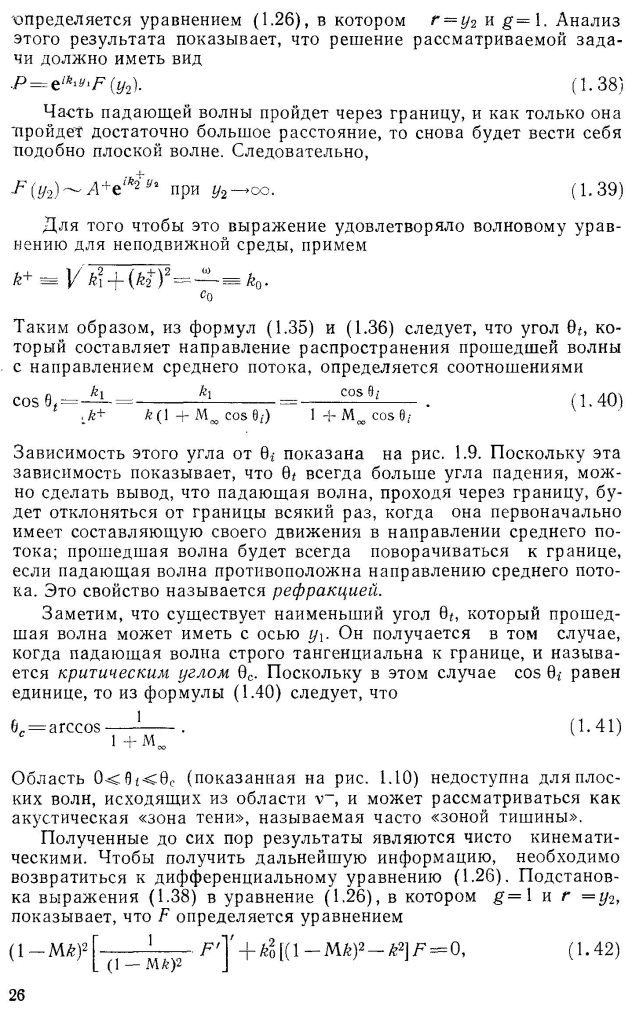
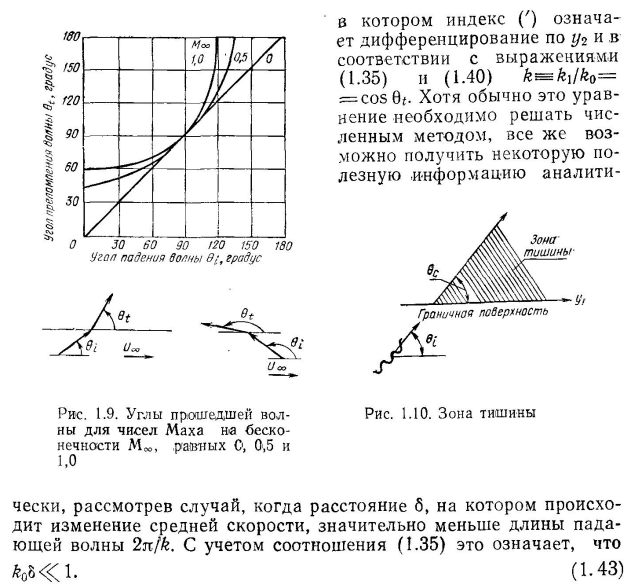
Вот только этот анализ никто не связывал с аберрацией звука и тем более не делал никаких выводов насчет аберрации света. Это не просто вопрос терминологии. Нет; в том-то и дело, что (как я пытаюсь показать) вопрос направления лучей и их аберрация в движущихся элементах среды имеет огромное значение для самого понимания сущности движения, волн и сил. Физика решила этот вопрос неверно, потому всё ее развитие пошло по ложному пути (речь идет о классической физике, не только о теории относительности и квантовой механике).
Физика рассматривает распространение волн в xyz координатах системы отсчета некого наблюдателя. Русика утверждает, что обойтись xyz координатами при описании волн принципиально нельзя. Разные элементы среды (каждый из которых имеет свою собственную внутреннюю систему координат) двигаются в разных направлениях с разными скоростями, вследствие чего лучи волн, переходя из одного элемента в другой, подвергаются аберрации – и пренебрегать этим нельзя. Забегая далеко вперед (я хотел говорить об этом значительно позднее), сила, действующая на элементы среды, тоже ведет себя как волна, то есть распространяется с определенной скоростью от источника и подвергается аберрации, отражению и преломлению. Именно учет движения элементов среды (Принцип Дуализма Движения) и аберрации волн и сил (Принцип Аберрации) и делает русику принципиально другой наукой о движении, чем физика. И требует принципиально другой математики. От физики, в итоге, останется на удивление мало. Очень немногое мы сможем позаимствовать (Принцип Гюйгенса одно из счастливых исключений).
Отредактировано: Yuri Rus - 06 дек 2019 19:02:06
Сейчас на ветке:
1,
Модераторов: 0,
Пользователей: 0,
Гостей: 0,
Ботов: 1